| Logos Productions: | ensembles | projects | concerts worldwide | logos public domain |
|
|
Godfried-Willem RaesA quick composers guide to the Logos Robot orchestra(more detailed info on one of the automatons, click on their name) |
This page summarizes the implemented midi commands for the robots constituting the robot orchestra. | 
|
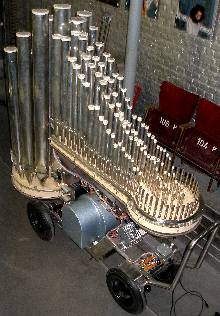
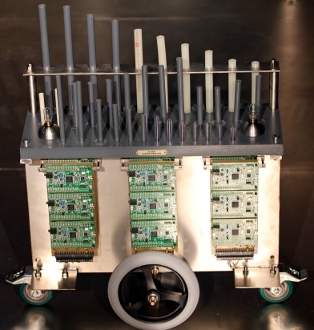
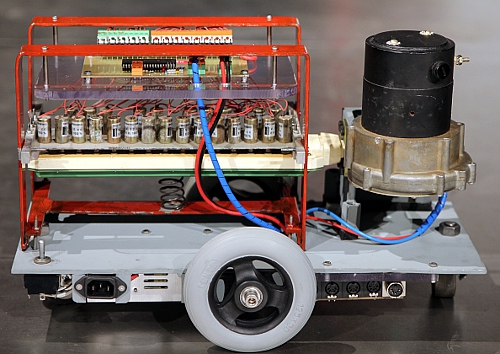
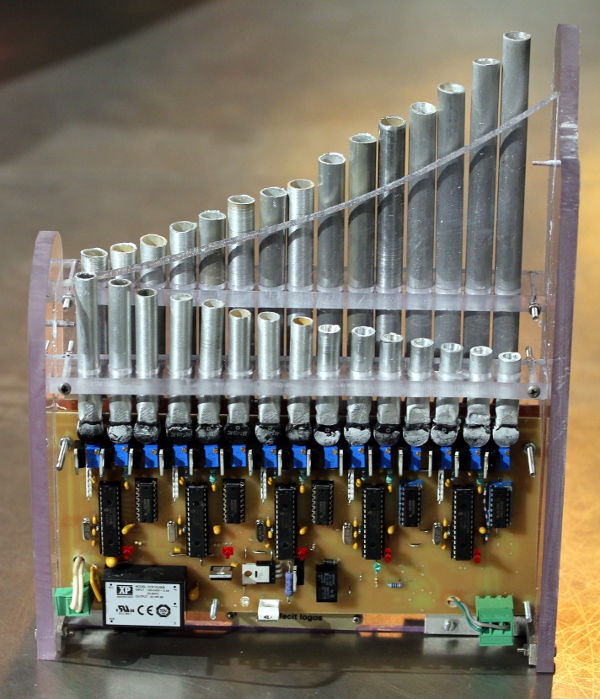
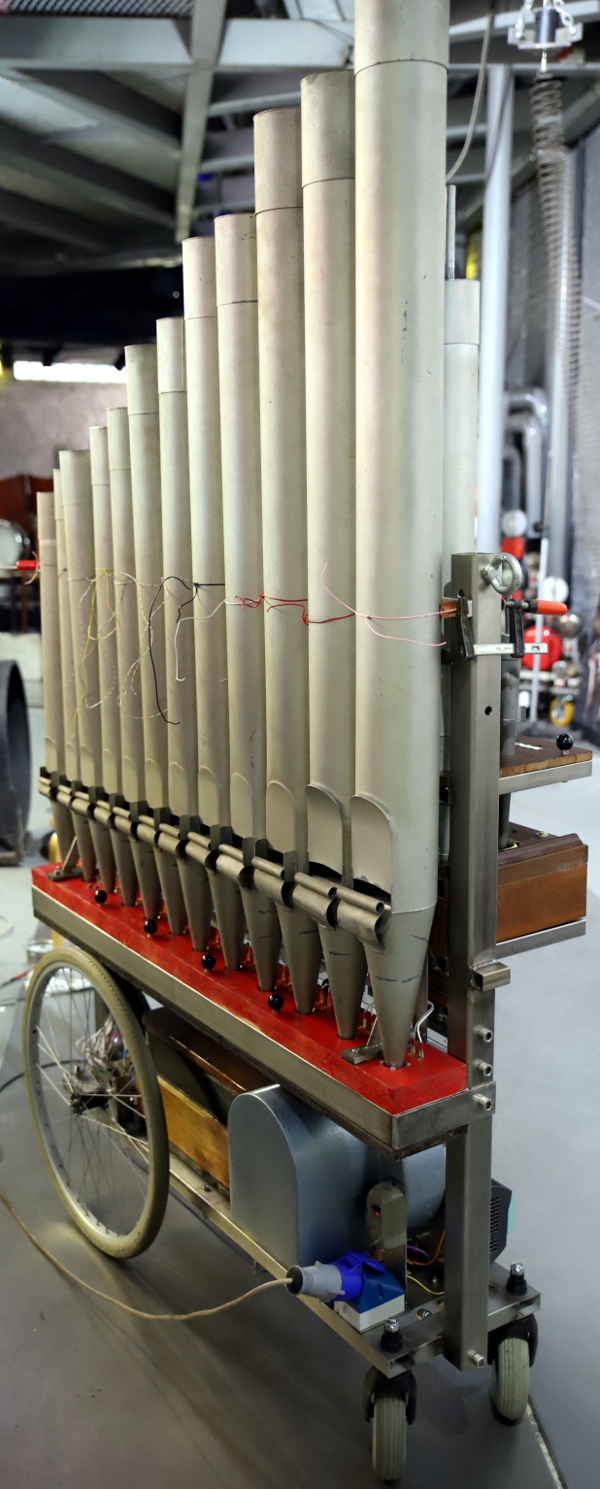
automated acoustical pipe and reed organs |
||
|
<Qt>
developped in collaboration with Ghent University Association |
 |
|
 <Bourdonola> |
|
|
 <Harma> |
|
|
|
developped in collaboration with Ghent University Association
|
<HarmO>
(a large automated reed organ)
|
|
|
<Krum> |
|
|
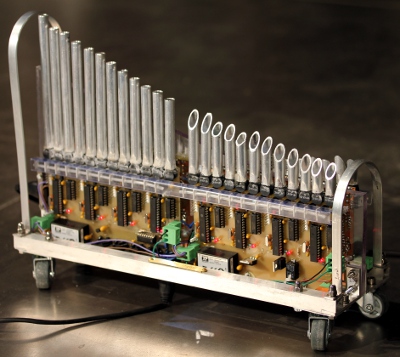
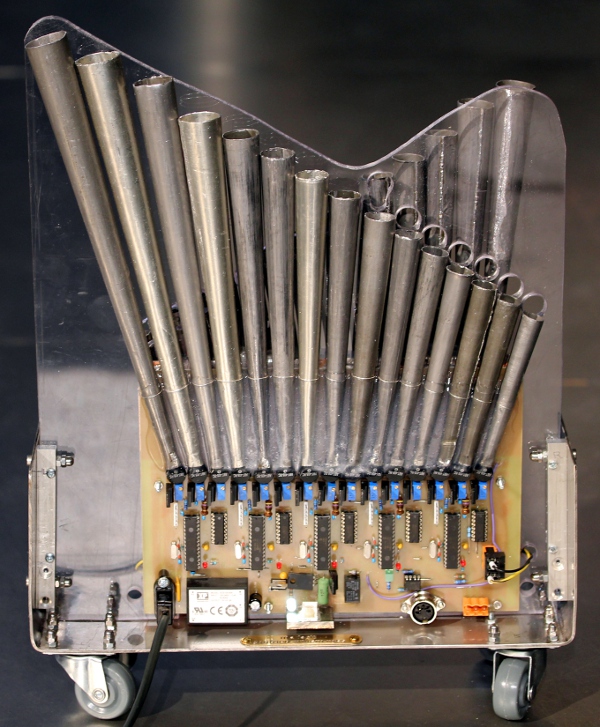
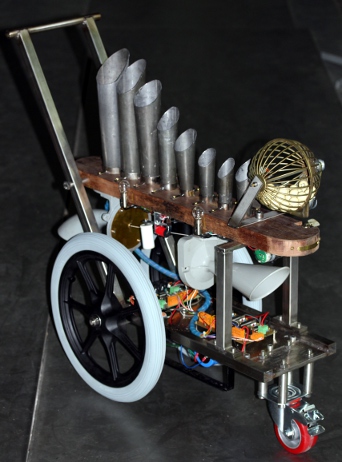
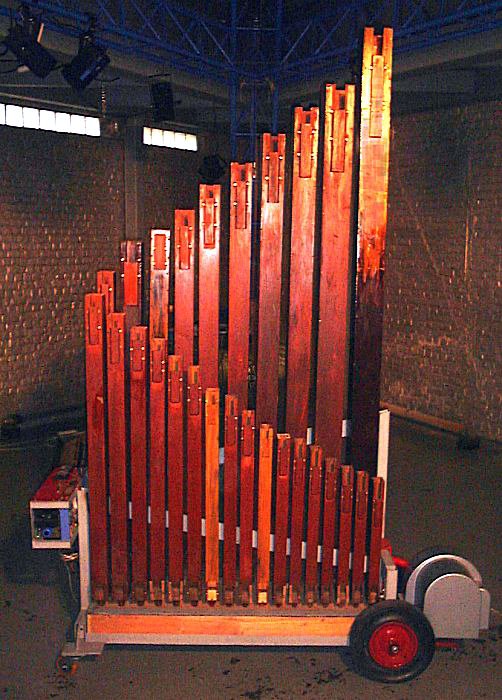
 <Piperola> |
|
|
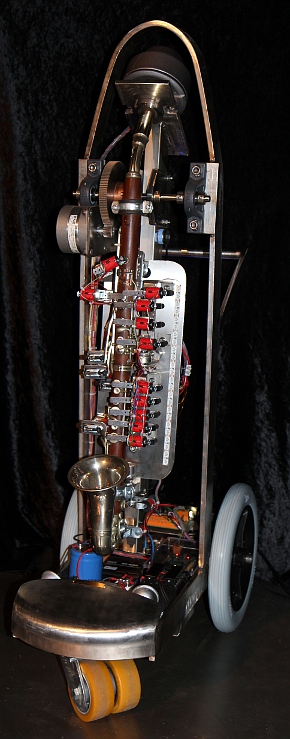
 <Vox Humanola> |
|
|
 <Trump> |
|
|
 <Ake> |
|
|
|
<Bako> |
|
|
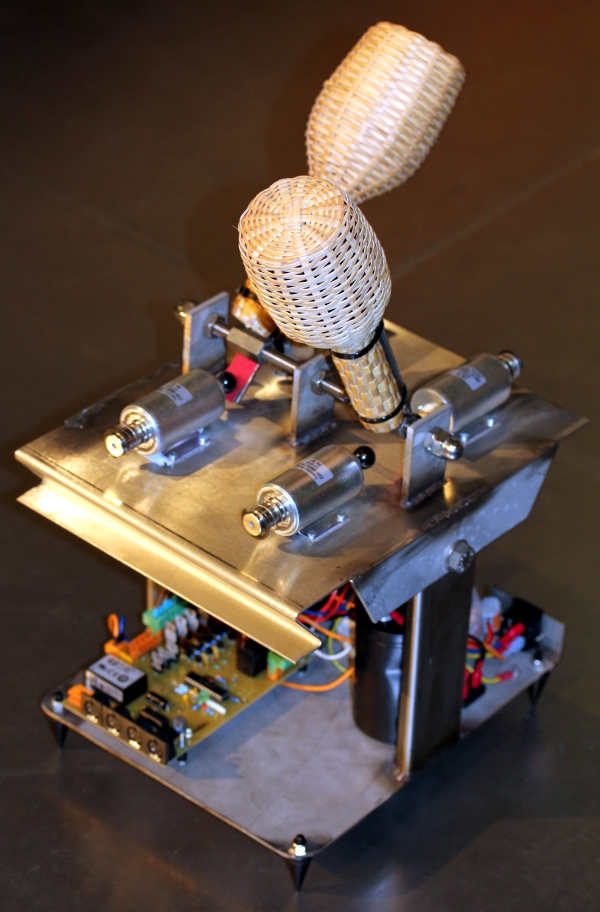
 <Puff> |
|
|
|
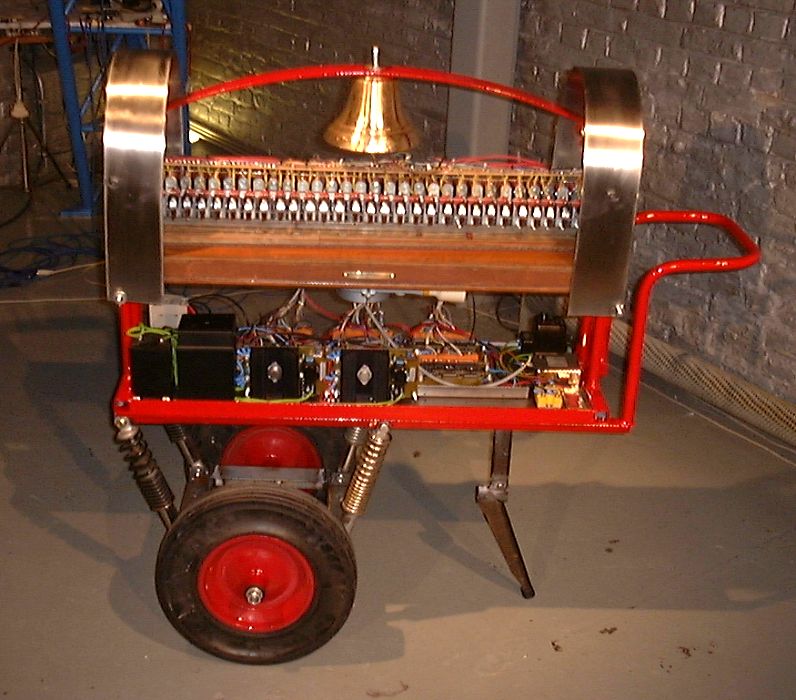
<Bomi> developped in collaboration with Ghent University Association |
<Bomi> (automated portable pipe organ with stopped wood pipes, 2010)
|
|
|
|
<Hybr> (hybrid membrane driven pipe resonators, 2014-2015)
|
|
|
|
<HybrHi> (hybrid membrane driven pipe resonators, high treble, 2015)
|
|
|
|
<HybrLo> (hybrid membrane driven pipe resonators, subbass register, 2016 / 2020)
|
|
|
|
<Melauton>, an
automated melodica (1998/2022)
|
|
|
|
<Pi> an extremely high pitched portable electromechanic serinette organ (2017)
midi note range: 84 to 127
|
|
|
|
<Pos> an automated positiv organ (2018)
|
|
|
|
<2Pi>, a 2 1/2 octave high pitched serinette (2018)
midi note range: 72 to 101
|
|
|
a building project we finished in 2021 without any kind of subsidy |
<RorO> a 6 octave roerpijp organ (2007-2021)
|
|
|
a building project we finished in march 2022 without any kind of support nor subsidy |
<3Pi>, a 2 1/2 octave high membrane driven regal using conical pipes (2022)
midi note range: 60 to 89
|
|
|
an experimental building project started in march 2022 without any kind of support nor subsidy. Finished august 2022. |
<4Pi>, a 5 1/2 octave membrane driven organ (2022)
|
|
|
a low bass pressure-wind reed organ, with
an extra wind outlet for a child robot such as <Melauton>. |
<Ubu>, a pressure-wind bass reed organ (2025)
|
Slag-werk - automated percussionBackground info: Web strikes back |
||
 <Klung> |
|
|
 <Rotomoton> |
|
|
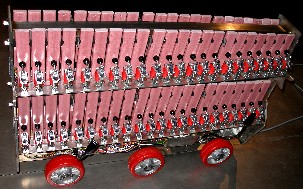
 <Springers> |
|
|
 <Thunderwood> |
|
|
|
<Psch> |
|
|

<Troms> |
|
|
|
<Snar> |
Note: an improved version of this robot was made to the order of Aphex Twin in 2014. The details can be retrieved here: <Snar_2>. |
|
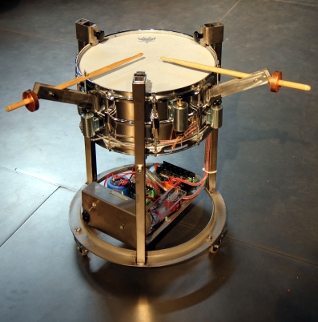 |
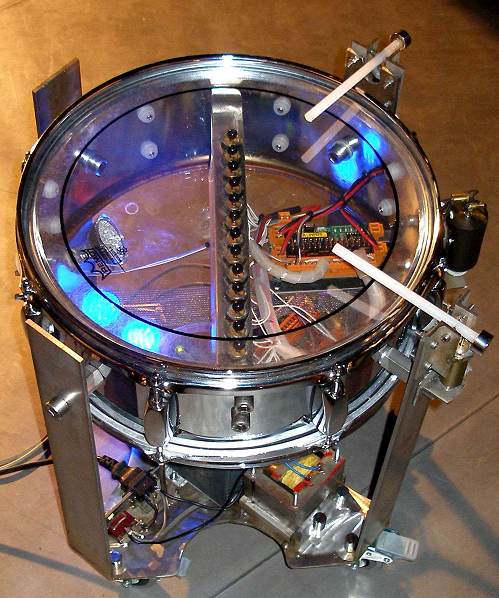
<Snar_2> , an improved automated
full featured snare drum
Note: this robot was made to the order of Aphex Twin in 2014. So it is not a member of the Logos Robot Orchestra. |
|
 <Vibi> |
|
|
 <Belly> |
|
|
 |
||
 <Flex> |
|
|
|
<Xy>
developped in collaboration with Ghent University Association, School of Arts |
|
|
|
developped in collaboration with Ghent University Association, School of Arts |
|
|
|
|
|
|
 <Llor> |
|
|
 <Tubi> |
|
|
|
<Casta Due> |
|
|
|
|
|
|
|
developped in collaboration with Ghent University Association, School of Arts and its students in instrument building |
An automated set of twelve chinese temple blocks (2012-2013)
|
|
|
developped in collaboration with Ghent University Association, School of Arts and its students in instrument building |
An automated set of tunable alu-bronze tines (2014/2017)
<Rodo> is equiped with a build-in two channel gesture sensing radar system. |
|
|
developped as part of a commission from the Ictus ensemble for the performance of George Antheil's Ballet Mechanique (Balmec project) |
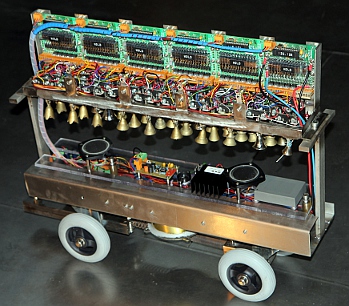
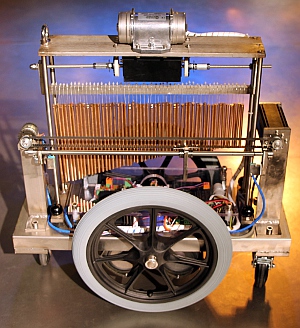
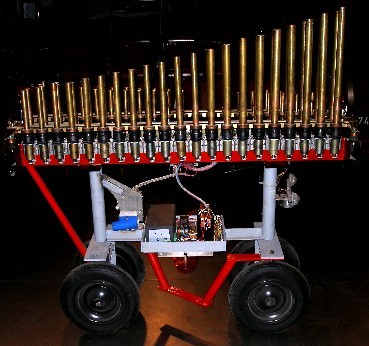
An automated set of electric bells (2015)
midi file and mp3 recording demo available: see Bello page |
|
|
an experimental tintinabuli instrument |
automated tintinabuli with ultrasound demodulation (2015)
|
|
|
automated orchestral windchimes (2016)
|
||
|
|
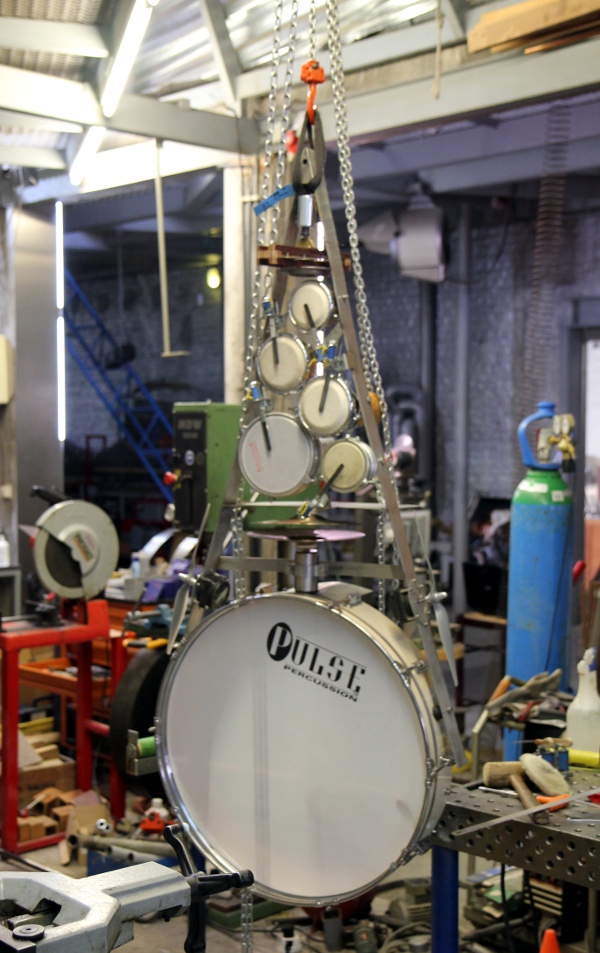
suspended automated drumkit (2018)
|
|
|
|
Aluminum tubular bells with dampers (2019-2020)
Note-off with release implemented, release steers the damping time.(default value 64) Note On with velo implemented (value 32=p, 64=f, 96=ff, given as a reference) Lights mapped on notes 120-126. Controller #20: Vibrato speed for notes 48-65 Midi channel: 4 (5 if counting from 1) |
|
|
An automated small diatonic steeldrum (2022) Note On with velo implemented Key-pressure used to steer individual note repetitions Controller #30: Global note repetition speed Midi channel: 7 (8 if counting from 1) |
||
|
2026 a building project we finished in 2026 without any kind of subsidy |
<Zip> (38 automated springs)
|
|
Monophonic wind instruments: |
||
 <Autosax> |
|
|
 <So> |
|
|
|
<Bono> |
|
|
|
<Korn> |
|
|
|
<Ob> |
<Ob> (automated oboe, 2008-2010)
|
|
|
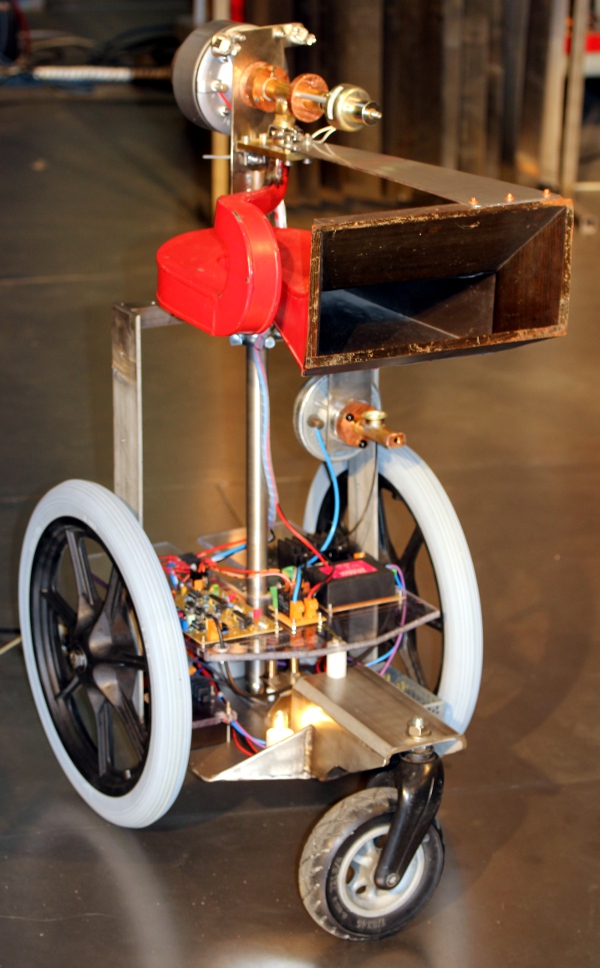
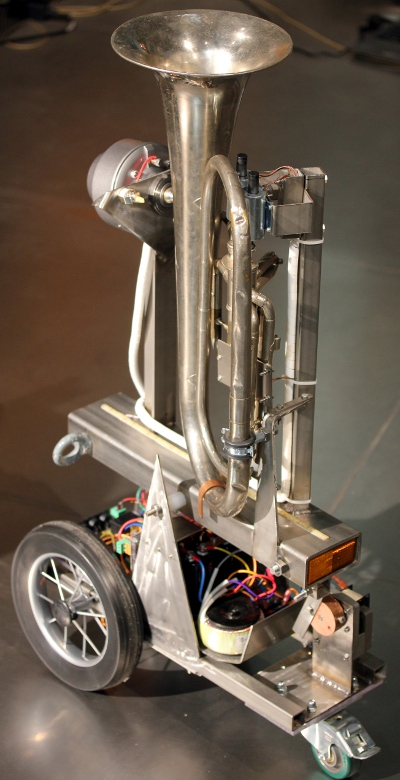
<Heli> |
<Heli> (automated helicon, 2007-2008)
|
|
|
<Fa> developped in collaboration with Ghent University Association |
<Fa> (automated bassoon,
2009-2012)
|
|
|
<Klar>
developped in collaboration with Ghent University Association, School of Arts |
<Klar> (automated microtonal alto or tenor clarinet, 2012)
|
|
|
developped in collaboration with Ghent University Association, School of Arts |
An automated microtonal french horn (2013)
Midi Channel: 14 (0r 15 if counting 1-16)
|
|
|
developped in collaboration with Ghent University Association, School of Arts |
An automated alto saxophone (2013)
Midi channel: 3 (or 4 if counting 1-16)
|
|
|
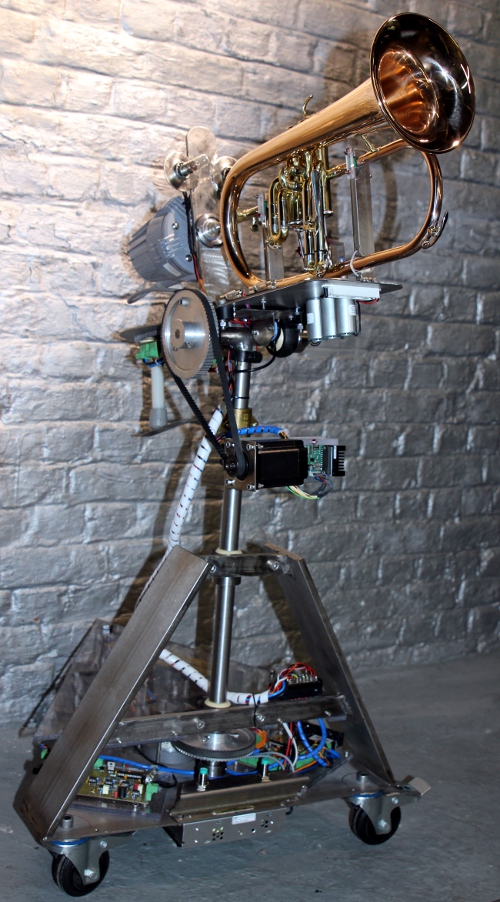
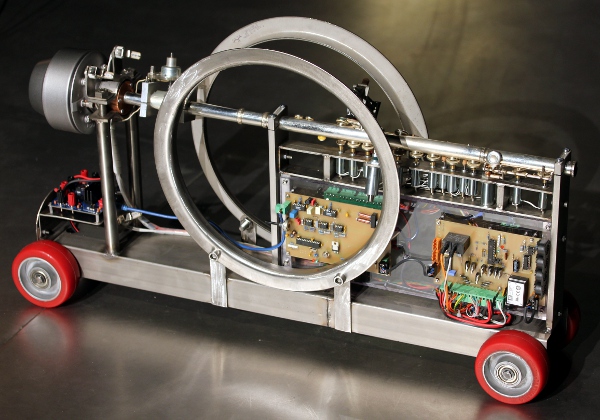
build on request of LOD for 'De Helden' |
An automated and automotive flugelhorn (2016-2020)
|
|
|
build without any kind of support |
An automated extended flute (2020)
|
|
|
build without any kind of support |
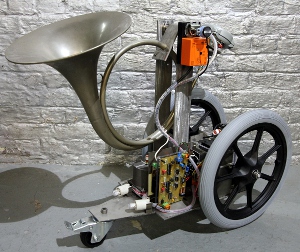
An automated hunting horn (2020)
|
|
|
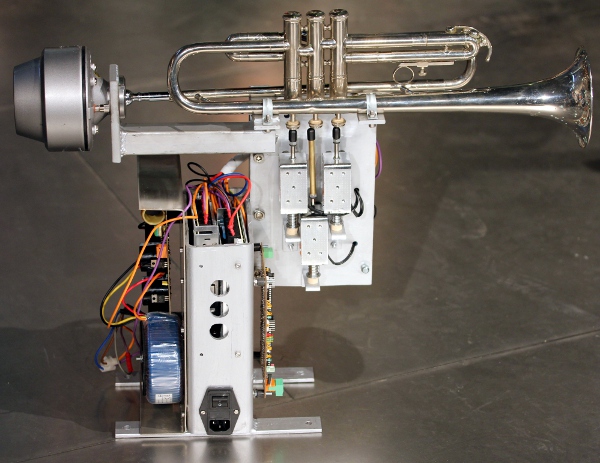
build to the order of Alain Van Zeveren, 2021 THIS ROBOT IS NOT IN THE ROBOT ORCHESTRA |
An automated Bb trumpet (2021)
|
|
|
build to the order of Alain Van Zeveren, 2021 THIS ROBOT IS NOT IN THE ROBOT ORCHESTRA |
An automated Eb alto horn (2021)
|
|
|
a building project finished in 2023 without any kind of support |
<Kazumi> an automated kazoo (2023)
|
|
|
an automated tenor saxhorn made by Charles Mahillon 2024 built without any kind of support |
|
|
|
<Bakla>
a building project maybe for 2024-2025 without any kind of support |
an automated bass clarinet (2020-?) |
Stringed Keyboard Instruments: |
||
|
|
|
|
|
|
|
|
|
<Spiro> developped in collaboration with Ghent University Association, School of Arts |
<Spiro> (automated spinet, 2011)
|
|
|
<Toypi> |
|
|
|
build to the order of Alain Van Zeveren, 2021-2024
|
<Pianet> an automated Hohner T-Pianet (2021-2024)
|
|
|
|
An automated Sperrhake spinet (2021-2025) midi channel: 4 (0 to 15)
|
|
|
made to the order of Marc Sinan, Berlin |
<Cemba>, an automated harpsichord (2024)
Midi channel: 0 |
String Instruments: |
||
 <Hurdy> |
|
|
|
developped in collaboration with Ghent University Association |
<Aeio> (twelve string automated and interactive aeolian cello robot) [2007-2017]
|
|
|
<Synchrochord>
developped in collaboration with Ghent University Association, School of Arts |
<Synchrochord> (automated bowed monochord, 2011-2016 under construction)
|
|
|
developped in collaboration with Ghent State University and De Centrale |
<Zi> (automated plucked Qanun or Zither, 2017, abandoned project as it was a failure)
|
|
|
an experiment with thrown hammers on strings, 2025 |
<Zibalo> (automated zither with hammered strings, 2025)
|
Others: |
||
 <Dripper> |
|
|
 <Sire> |
|
|
|
<PolyMetronome>
developped in collaboration with Ghent University Association, School of Arts |
An electronic polymetric conductor with moving metronome arms. (1994/2012)
|
|
|
developped in collaboration with Ghent University Association, School of Arts |
An automated set of cavity resonators operated on very low pressure (2013)
|
|
|
developped in collaboration with Ghent University Association, School of Arts |
two 4 digit displays (2014)
|
|
|
commissioned in part by the Ictus Ensemble |
a robotic assembly for the performance of 'Ballet Mecanique'
by George Antheil (2015) |
|
|
|
|
|
|
<Prop 2>: Large size wood airplane propeller (2015)
|
||
|
|
<Prop 3>: Large size metal airplane propeller (2015)
|
|
|
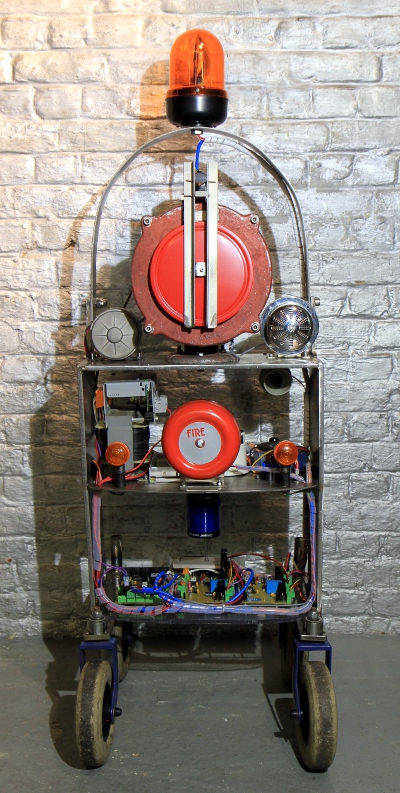
developped in part for the performance of George Antheil's Ballet Mechanique (Balmec project) Finished january 2019. |
<Balsi>: large midi controlled siren, smaller sirens and alarms (2014-2019)
|
|
|
made to the order of Stef Kamiel Carlens, 2021-2022
|
an automated set of maracas Midi channel : 10 Note range: 60 - 74 |
|
|
a building project we attempt to finish in 2025 without any kind of subsidy |
<Rumo>, an automated intonarumori-like noise making instrument [2014-2023]
Midi implementation:
|
|
|
<Reco> a project we are considering if we can get some kind of subsidy to continue our research. |
a set of four robots: <RaspA>, <RaspE>, <RaspI>, <RaspO> Midi implementation:
under design and consideration |
|
| <Klaks>, <Toru>, <Ribby> [under design and construction] |
|
Note: we have many more robots than there are midi channels (16), hence we use an 8-port midi device to control the entire M&M robot orchestra. Port setting is handled automatically in our GMT midi fileplayer software, so users do not have to worry about this. As long as you mention the name of the robot in the title of each midi track (use the <name> notation), everything will work fine. Midi files for the orchestra must be in format 1 (multitrack). Use a single track for each robot. Multiple tracks for a single robot (quartertone instruments make this mandatory) are possible, but never combine two or more different robots in a single track. For composers wanting to take profit of the visual possibilities of the robots, we made an easy to use synoptic table with the possibilities implemented on each robot. Click here. Further Information:
|
Port and Channel assignments as used in the Logos Robot orchestra [update 05.06.2024, using an 8/12 port midi device]:
| Port 0 - L | Port 1 - L | Port 2 L | Port 3 -L | Port 4 -R | Port 5 -R | Port 6 -R | Port 7 - Gang | Port 8 | Port 9 | Port 10 | |
| Channel 0 |
<Player Piano>1 |
<Display> [1] |
|
<pp2> | <Display>[2] | <Pianet> |
<PIR2> |
<HY1> | <Poly-Metronome> |
<Playola> |
|
| Channel 1 | <Casta2> | <Ubu> |
|
<Simba> | <Humanola> <Casta1> |
<Aeio> |
<Melauton> | ||||
| Channel 2 | <Bourdonola> |
<Pos> |
<Xy> [442Hz] | <Piperola>
|
<Hunt> |
||||||
| Channel 3 | <Asa> | <AutoSax> | <Bomi> | <ThunderWood> |
<Xyq> [455Hz] | <RorO> |
|||||
| Channel 4 | <Spiro> |
<Vacca> |
<Zip> |
<Vitello> |
<Zibalo>
|
<Sper> |
<Klung> |
<Tubo> |
<Zi> | ||
| Channel 5 | <Psch> | <Qt> | <Pi> | <2Pi> | <3Pi> | <Klar> |
|||||
| Channel 6 |
|
<Qtq> | <Snar> |
|
<Per> |
<Troms> | <Bakla> | ||||
| Channel 7 | <Steely> | <Krum> | <Springers> | <Bako> |
<Rodo> |
||||||
|
Channel 8 |
<Hybr> <HybrHi> |
<Ake> | <Heli> |
<HybrLo> |
<Rotomoton> | ||||||
| Channel 9 |
<Harma> |
<Chi> | <Hurdy> | <HarmO> |
|||||||
| Channel 10 | <Hat> | <Vibi> |
<Toypi> |
<Synchrochord> |
<Rumo> <Shak> |
||||||
| Channel 11 |
<Belly> |
<4Pi> | <Whisper> |
<Llor>
|
<Tinti> | ||||||
| Channel 12 | <Sire> | <Korn> | <Bug> | <Flex> |
<Temblo> | <Pluck> | <Trumpeter> | ||||
| Channel 13 | <Flut> |
|
<Teno> | <Puff> | <Bono> |
<Bello> <Balmec> |
<Cornalto> | ||||
| Channel 14 | <So> | <Dripper> | <Kazumi> | <Horny> |
<Ob> |
||||||
| Channel 15 | <Trump> | <Balsi> |
<Reco> <RaspA-RaspO> |
<Fa> |
<Tubi> |
<CQT> |
Overview of all controllers used in the M&M robot orchestra (this table became unworkably large and is in need of a user friendly revision... The plugin's for the robot orchestra designed by Alain Van Zeveren are a usefull alternative.)
Physical setup of the robot network at Logos Foundation:
Note: Pneumaphone is not a member of the robot orchestra. However its radial compressors (Ventus, Shu. Set, Astraeos and Foehn) can also be midi controlled and hence got an assignment in this table.