|
Percussion Robot Research project on the development of tools for musical expression
|
|
<Shak>
an automated pair of shakers dr.Godfried-Willem RAES 2021 |
|
Percussion Robot Research project on the development of tools for musical expression
|
|
<Shak>
an automated pair of shakers dr.Godfried-Willem RAES 2021 |
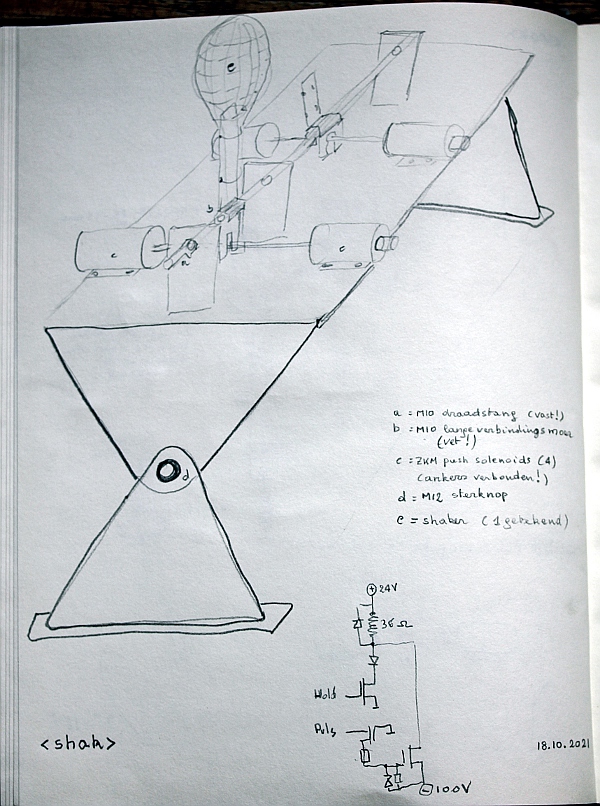
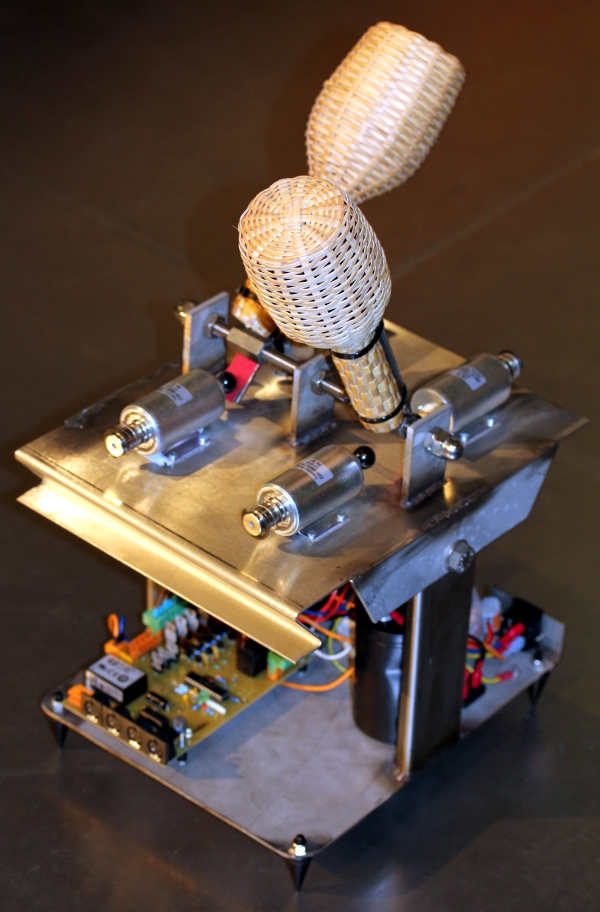
<Shak>
An automated pair of shakers made and designed to the order of Stef Kamil Carlens.
Earlier designs for automated shakers we realised, can be found in the robots
<Springers>, <Hat> and <Whisper>. At first sight, automating
shakers seems to call for either a motor capable of fast CW and CWW operation
or a bidirectional solenoid. As we had not too good experiences with motors
-too slugish and if fast, way too noisy- we looked into bidirectional solenoids
as used for the maracas in our <Springers> robot. Unfortunately though,
the factory where we bought these parts -August Laukhuff Gmbh- went out of business
in the summer of 2021. Apparently their activity has been taken over by Heuss
Gmbh, but our attempts to order comparable parts from them failed. We didn't
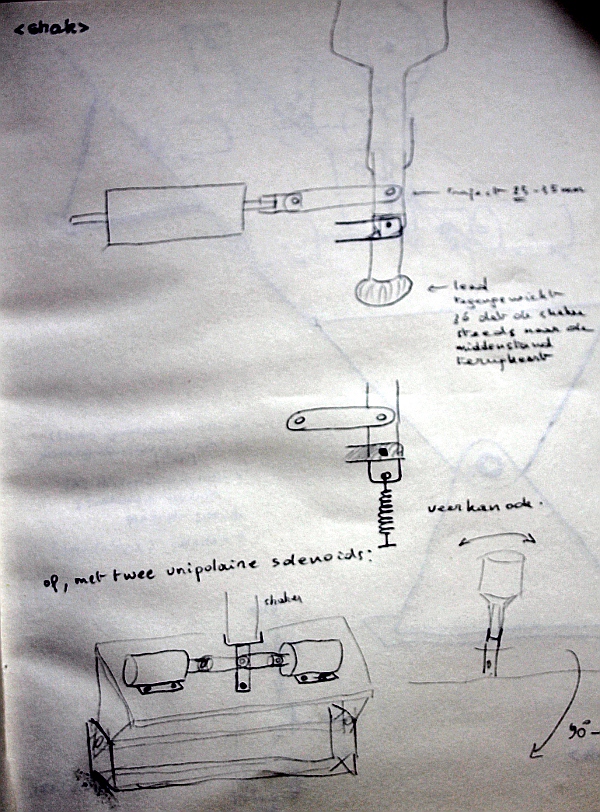
get any response on our requests... As an alternative, we realized a bidirectional
mechanism by using two unidirectional solenoids. The Tremba type ZMF3865d looked
like a viable component.  This
solenoid, distributed by Conrad, is specified to operate at 24 V with 100% duty
cycle. It then consumes a power of 11 W. So, calculated resistance should be
52.4 Ohm. If duty cycle is limited to 5%, after the data sheet, we can dissipate
up to 220 W. Calculated voltage from these values gives 107 V. The required
trajectory for the anchors, in our application, is 20 mm. The force delivered
by the solenoids, with 107 V applied, is then 30 N. The optimum trajectory for
this type of solenoid is 15 mm, whereby they deliver a force of 40N. The circuit
used for precise velocity control was dimensioned and calculated like this:
This
solenoid, distributed by Conrad, is specified to operate at 24 V with 100% duty
cycle. It then consumes a power of 11 W. So, calculated resistance should be
52.4 Ohm. If duty cycle is limited to 5%, after the data sheet, we can dissipate
up to 220 W. Calculated voltage from these values gives 107 V. The required
trajectory for the anchors, in our application, is 20 mm. The force delivered
by the solenoids, with 107 V applied, is then 30 N. The optimum trajectory for
this type of solenoid is 15 mm, whereby they deliver a force of 40N. The circuit
used for precise velocity control was dimensioned and calculated like this:
 These considerations
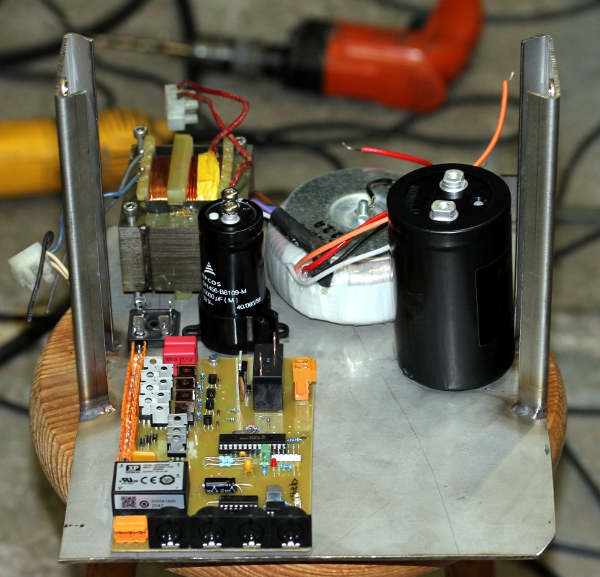
lead to a power supply dimensioned like this:
These considerations
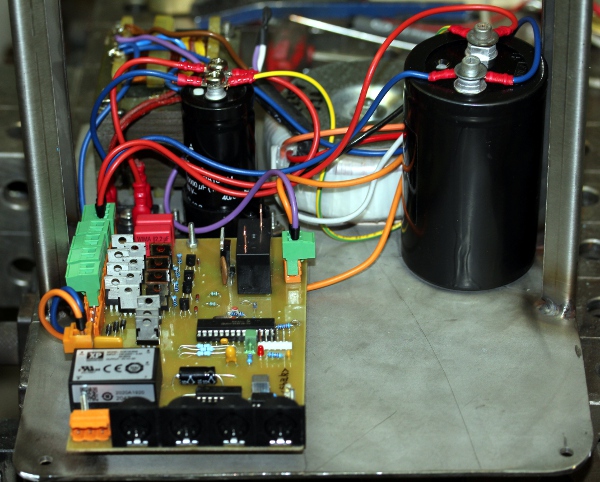
lead to a power supply dimensioned like this: The
+24V/32V power supply is used for the holding force, whereas the negative supply
is used for the pulses only. Required current is quite high, but only needed
for very short time intervals. Hence the application of pretty large capacitors.
The
+24V/32V power supply is used for the holding force, whereas the negative supply
is used for the pulses only. Required current is quite high, but only needed
for very short time intervals. Hence the application of pretty large capacitors.
The circuit for steering the four solenoids resembles the one designed for
the valve control used for our robotic brass instruments, but obviously the
firmware turned out to be completely different. The processor ports RA4, RC0,
RC2 and RC5 are used to switch the 24V hold voltage on. On the ports RA5, RC1,
RC3 and RC4 the high voltage pulses are generated to steer shaker attacks with
high precision. A high pulse on these outputs, switches the corresponding solenoid
on between the 24/32 V and the -100 V power supply lines. Thus the voltage over
the solenoid is effectively >=110 V. 
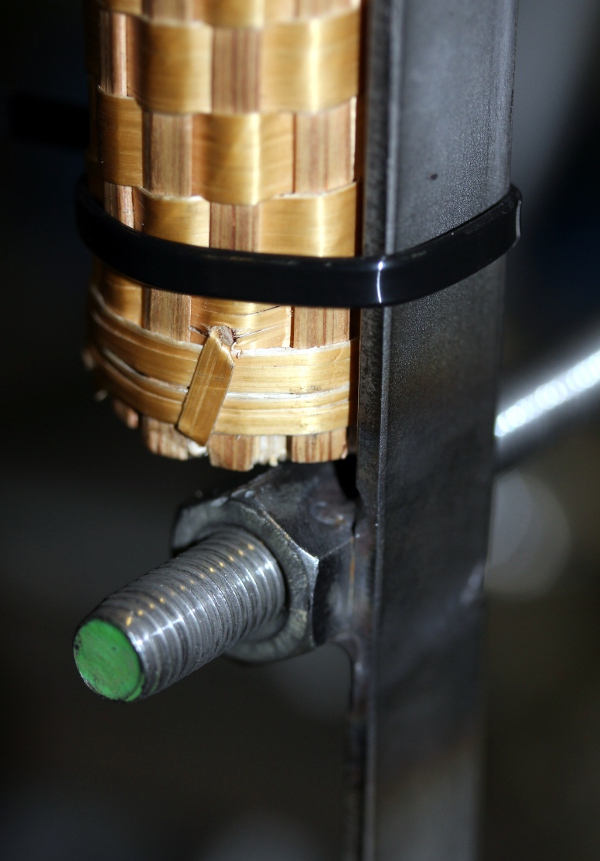
Mechanically, we performed a lot of expertiments to find out what kind of mechanism works -and sounds- best, also taking into account side noises originating from different sources of faults and imprecisions plaguing just about any mechanic construction.
Note 60: Shaker1 forward, velocity byte steers the attack force
Note 61: Shaker1 backwards, velocity byte steers the attack force
Note 62: Shaker 2 forward, velocity byte steers the attack force
Note 63: Shaker 2 backwards, velocity byte steers the attack force
Note 72: Shaker 1, toggling over and back, velocity byte steers the attack force
Note 74: Shaker 2, toggling over and back, velocity byte steers the attack force
Notes 120, 121, 122: lights [not yet mounted]
Controllers:
Controller #60: Hold time for shaker 1 forwards
Controller #61: Hold time for shaker 1 backwards
Controller #62: Hold time for shaker 2 forwards
Controller #63: Hold time for shaker 2 backwards
Controller #66: Power on/off., Power ON resets all controllers.
Controller #69: light automation on or off.
Controller #123: All notes off, reset.
Still subject to changes.
Technical specifications:
Design and construction: dr.Godfried-Willem Raes
Collaborators on the construction of this robot:
Music composed for <Shak>:
Stef Kamil Carlens in the making.
Pictures taken during the construction in our workshop:


| Back to Main Logos page:index.html | To Godfried-Willem Raes personal home page... | To Instrument catalogue |  |
<Shak>
Dit automatiseringsprojekt ging van start op vraag van Stef Kamil Carlens. Het maakt dan ook geen deel uit van ons grote projekt rond de bouw en ontwikkeling van het robotorkest. Shakers zijn voor gebruikers van het robotorkest beschikbaar, onder meer als deel van de <Springers> robot. Een gemotoriseerde shaker is ook beschikbaar als onderdeel van de <Rumo> robot.
Bouwdagboek - Construction & Research Diary:
P-kanaal mosfets BSP245 hebben we niet meer in voorraad. Dit type is bestand
tegen -250V... Dan maar VP0109 types toegepast. De maximale spanning is dan
slechts -90V, marginaal toepasbaar hier. De vroeger vaak door ons toegepaste
BS250 is hier volkomen ongeschikt, want slechts bestand tegen -45V. Voor de
10V zenerdiodes gebruikten we 1W types. De IRF620 mosfets hadden we nog in
stock. Het enige nog op de print ontbrekende onderdeel is nu het 5V Zettler
relais. Bestelling geplaatst bij Farnell. We kunnen beginnen met het ontwerp
van de firmware en de bouw van de nodige voedingen.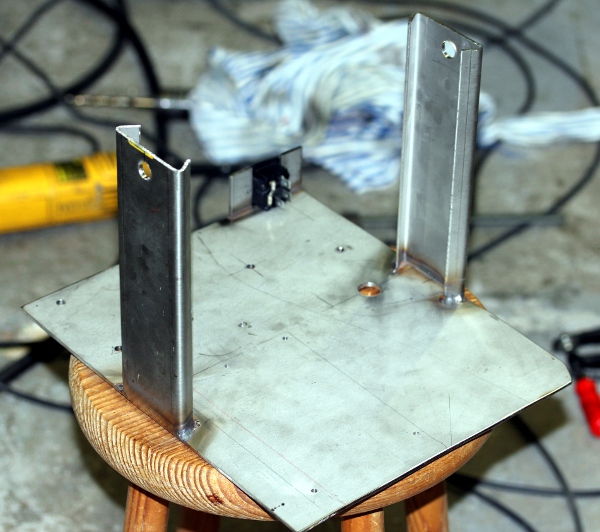
 Bezoek
van een spaanse studente die wil in de leer komen voor robotica... A long
working day... Op het einde van de dag kon <Shak. zijn eerste tests doorstaan
en ritmes spelen.
Bezoek
van een spaanse studente die wil in de leer komen voor robotica... A long
working day... Op het einde van de dag kon <Shak. zijn eerste tests doorstaan
en ritmes spelen.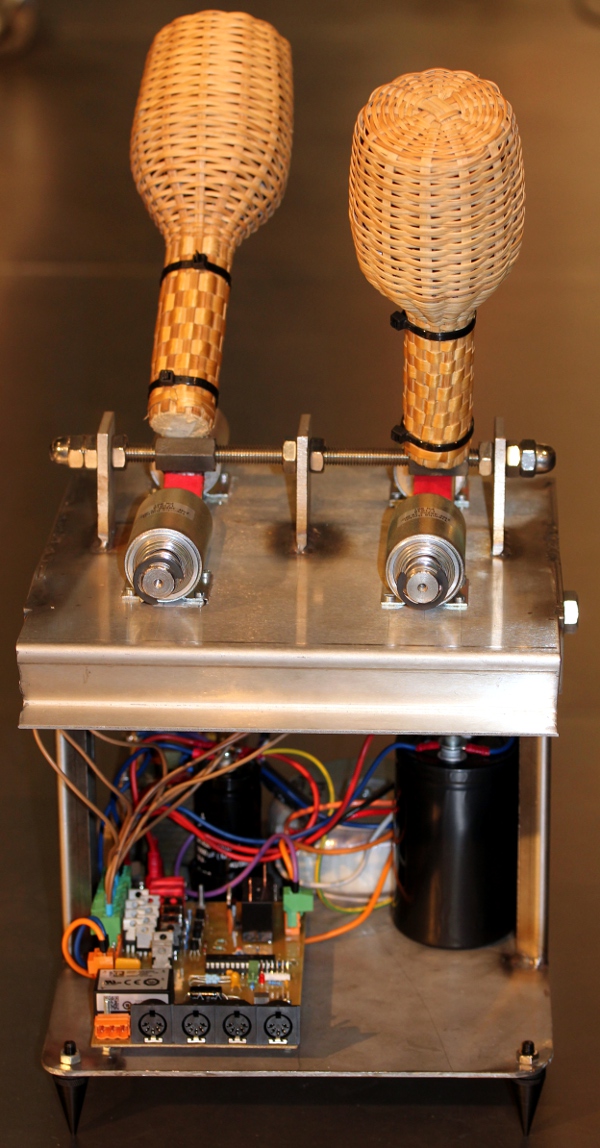
| (Terug) naar logos-projekten: | Terug naar Logos' index-pagina: | Naar Godfried-Willem Raes personal homepage... | Naar katalogus instrumenten | |
M&M orkest |
Last update: 2023-10-31 by Godfried-Willem Raes
The following information is not intended for the general public nor for composers wanting to make use of the <Shak> robot, but is essential for maintenance and servicing of the robot by our clients and collaborators. It also might be usefull for people that want to undertake similar projects.
Technical drawings, specs and data sheets:
Power supplies:
Wiring & circuit details midihub board:
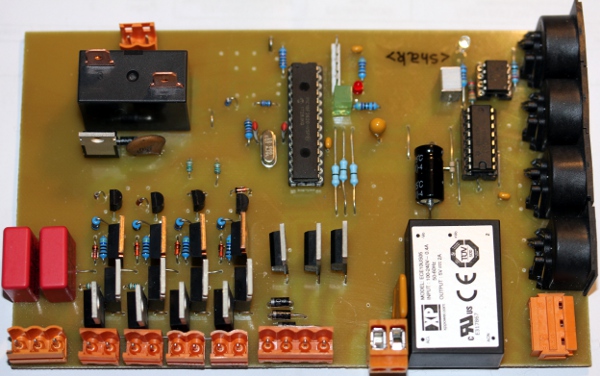
Circuit details solenoid driver board:
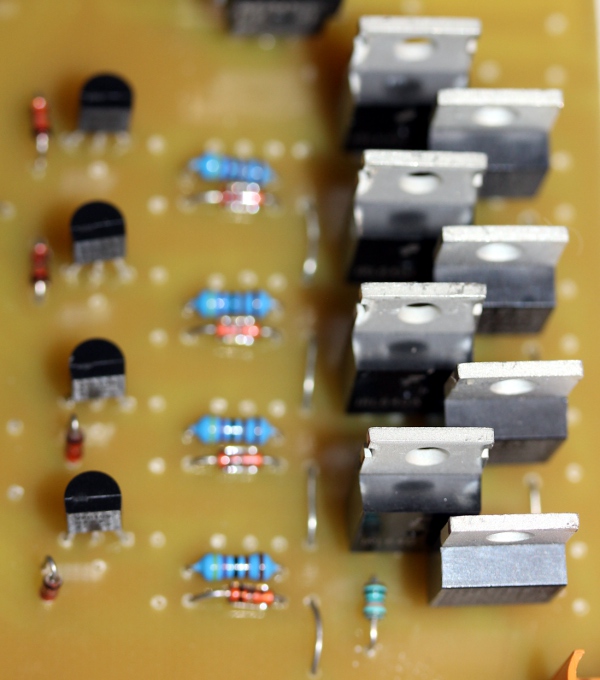
 Here is a picture
of the assembled board:
Here is a picture
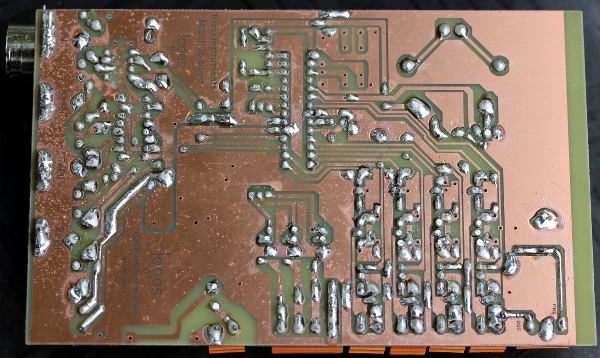
of the assembled board: 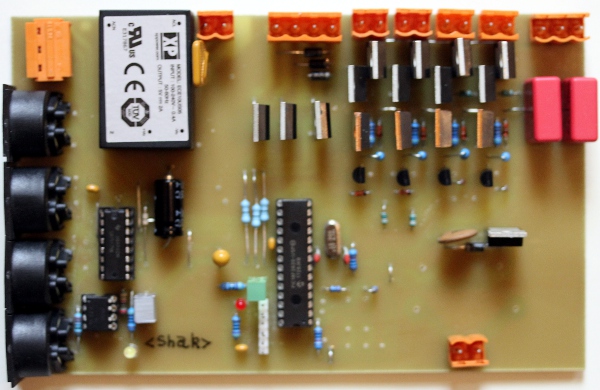 (the 5V relay is not yet mounted on the picture). And, this is the solder side:
(the 5V relay is not yet mounted on the picture). And, this is the solder side:
Solenoids: Tremba Gmbh, Zylinderhubmagnet, ZMF-3865d-15.002-24VDC. Datasheet.
Cost calculation:
1. Materials and components
| tubular solenoids: | 4 ZMF-3865, 24V DC - 100% - double threaded |
116,00-
|
464,00-
|
| PCB Hub & P/H board: | 1 |
250,00-
|
250,00-
|
| Power supply | 24V |
100,-
|
100,00-
|
| Power supply | 100V (toroidal, Kemet elco 12mF - 200V) |
250,-
|
250,00-
|
| Chassis | stainless steel |
200,-
|
200,00-
|
| Draadstang, M10, inox |
8,00-
|
8,00-
|
|
| Verbindingsmoeren M10 inox | 2 |
5,10-
|
10,20-
|
| M10 inox moeren | 6 |
0,21-
|
1,26-
|
| M10 inox eindmoeren | 2 |
3,50-
|
7,00-
|
| M4 studs and dampers | 8 |
4,20-
|
33,60-
|
| M3.5 x 8 boutjes en moeren, inox | 25 |
8,00
|
8,00-
|
| Teflon | 1 |
2,50-
|
2,50-
|
| M12 inox bouten en moeren | 2 |
4,00-
|
8,00-
|
| M5 X 80 cylinder bouten | 4 |
3,30-
|
13,20-
|
| M5 x 16 cyclinder bouten | 2 |
0,90-
|
1,80-
|
| M4 x 16 cyclinder bouten | 4 |
0,60-
|
2,40-
|
| M3 x 30 bouten + 10 mm afstandsbussen | 4 |
1,80-
|
7,20-
|
| M12 sterknoppen | 2 |
5,40-
|
10,80-
|
| Material cost estimate |
1.377,96-
|
2. Consumables
| Cobalt drill bits | 1 |
20.00
|
| TIG welding materials | Argon gas and Tungsten/Thorium electrodes |
10.00
|
| Cutting disks | 2 (A60 T-BF41 125 x 1.0 x 22.2) |
8.00
|
| Flap disc, 160mm | 1 |
12.00
|
| Sanding disks and paper | 1 |
4.00
|
| TIG welding nozzle, nr.5 | 1 |
12.00
|
| Cutting oil (spray can) | 1 |
1.00
|
| Solder Pb/Sn 40/60 & leadfree | 5 m |
5.00
|
| Aceton | 0.5 l |
4.00
|
| Etching baths | Fe2Cl3 1 liter |
5.00
|
| Methanol | 0.25 l |
2.00
|
| NaOH sollution | 0.5 l |
1.00
|
| Subtotal: |
84,00-
|
3. Depreciations on tools and equipment used (calculated over 1 month)
| Tool | Value | Depreciation percentage / month | |
| Tektronix TDS2024C | 3500 | 2.77% |
97.00
|
| TIG welding equipment | 2000 | 2.77% |
55.00
|
| Contimex Lathe | 2500 | 2.77% |
69.50
|
| Cobalt saw | 2800 | 2.77% |
77.50
|
| Soldering equipment | 1000 | 2.77% |
27.50
|
| Proton+ Laptop & ICD | 1800 | 2.77% |
25.00
|
| Lab power supply | 380 | 2.77% |
5.00
|
| Odin column drill | 6000 | 0.92% |
27.50
|
| Welding table | 2500 | 0.92% |
11.50
|
| Subtotal: |
395.50
|
4. Labor and design (45,-/hour)
| 06.10.2021 | 2 h |
90.00
|
| 18.10.2021 | 2 h |
90.00
|
| 19.10.2021 | 8 h |
360.00
|
| 20.10.2021 | 4 h |
180.00
|
| 23.10.2021 | 4 h |
180.00
|
| 24.10.2021 | 6 h |
270.00
|
| 26.10.2021 | 6 h |
270.00
|
| 27.10.2021 | 8 h |
360.00
|
| 29.10.2021 | 2 h |
90.00
|
| 01.11.2021 | 9 h |
405.00
|
| 02.11.2021 | 2 h |
90.00
|
| 03.11.2021 | 3 h |
135.00
|
| 05.11.2021 | 3 h |
135.00
|
| 06.11.2021 | 8 h |
360.00
|
| 07.11.2021 | 12 h |
540.00
|
| 08.11.2021 | 2 h |
90.00
|
| Subtotal: |
3645,00-
|
Total estimated cost: 5.800,-
References:
Raes, Godfried-Willem, "Expression
control in musical automates", 1977/2022
Raes, Godfried-Willem, "Logos @ 50, het kloppend hart van de avant-garde
muziek in Vlaanderen", 2018
![]()