|
an experimental hurdy gurdy robot
|
|
<Hurdy>

Godfried-Willem
RAES
2004/2008
|
Robot: 'Hurdy'
This robot is a bowed bass instrument with two strings of equal length, covering
a range of nearly four octaves. The construction of the bow mechanism is a further
development of our first designs in this direction, implemented in <Flex>,
our singing saw. The bowing speed, and consequently the loudness, can be controlled
as well as the direction of rotation. Bow pressure can also be controlled independently
for both strings. The time plot shown further below gives the details of the
control possibilities. Rosin is continuously applied to the bow material through
a rosin holder wherein the bottom wheel of the bow mechanism rotates. The frets
are realized with strong electromagnets equipped with tangents. They are moveable,
such that the instrument can be prepared to play in different tuning systems,
including just intonation. The resonators for the strings are constructed from
thin stainless steel pots, welded on a heart shaped sound board. The metallic
and harsh sound the instrument produces when bowed was intended. Softer sounding,
almost etheric string sound, including all flageolets, can also be produced
using the e-drive mechanism. This machine is fully programmable and can work
under midi control.
Some pictures taken during the construction (many more pictures below...):



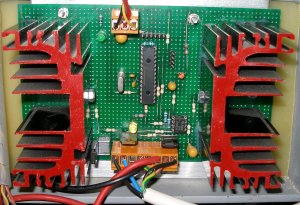
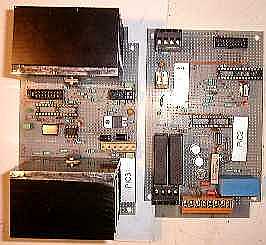
The electric circuitry is depicted in the overview below:

Three PIC controllers are used, each with a specific task. The first PIC translates
the midi note commands into switch positions for the correct tangents pushing
against the strings. Its schematic is straightforward and looks like:
The second PIC is used to control the bow motor controller as well as a pair
of lights mounted on the front of the robot. The lights are controlled by an
optical isolated solid state AC relay, switching the mains voltage for standard
halogen switching power supplies.
The third controller, steers in (inverted!) PWM both bow pushers (soft-shift
solenoids) as well as an optional extra 8-bit port that can be used to add a
couple of small stepping motors, to pluck the strings.
 The different parameters for the bow pressure control implemented follow from
the diagram below:
The different parameters for the bow pressure control implemented follow from
the diagram below:
In 2007, we added a mechanism with associated electronics, for bowing the strings
under influence of an electromagnetic driver. The solenoids used were made by
disassembling a couple of 100V loudspeaker line driver transformers rated for
20W power, and removing the I shaped mu-metal from the transformers cores. The
electronics make use of a fourth PIC microcontroller, this time a very fast
16 bit dsPIC type PIC30F3010:
 Using this
way of driving the strings, very clean and etheric string sounds can be produced
as well. However, very accurate tuning of the strings is mandatory for this
mechanism to work well. The mechanism itself can be used as a tuning aid, using
our specific driver software under GMT. When using commercial software such
as sequencers, users should first send the controllers 20 and 21 with the exact
midi note to which the low and high strings are tuned, followed by note on command
for resp.. note 40 and 64. This will sound the open strings, so that they can
be tuned. The picture below shows the board responsible for the e-drive mechanism.
Using this
way of driving the strings, very clean and etheric string sounds can be produced
as well. However, very accurate tuning of the strings is mandatory for this
mechanism to work well. The mechanism itself can be used as a tuning aid, using
our specific driver software under GMT. When using commercial software such
as sequencers, users should first send the controllers 20 and 21 with the exact
midi note to which the low and high strings are tuned, followed by note on command
for resp.. note 40 and 64. This will sound the open strings, so that they can
be tuned. The picture below shows the board responsible for the e-drive mechanism.
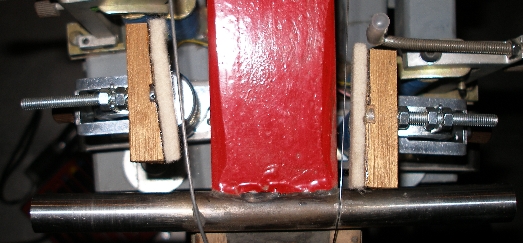
At the end of the string, near the tuning pegs, we added two solenoid driven
felt dampers, for smoother operation:
The 5V power supply was built into the large mains-switch box, together with
the MIDI receivers and the midi THRU provision. Each of the three TTL-midi outputs
of this miniature board goes to one of the PIC controller boards, such that
their functionality can easily be tested and debugged separately.

Technical specifications:
- size: ca. 600mm wide, 1500mm long, 1300mm high
- weight: ca. 120kg
- Maximum sound pressure level: 92dBA (bowed string)
- control: <Hurdy> responds to midi commands through its midi port.
It listens to channel 9. The complete midi specification can be found below
the Dutch text underneath.
- Insurance value: 13.000 Euro.
Design, research and construction: dr.Godfried-Willem
Raes
Collaborators on the construction of this robot:
- Johannes Taelman (firmware PIC microcontrollers)
- Kristof Lauwers (GMT-coding)
- Moniek Darge (requisites)
- Xavier Verhelst (double bass expert)
On July 20th 2004, this robot became an integral part of the <M&M>
robot orchestra. It was the first bowed string instrument to join the orchestra.
In 2007 we added an electromagnetic string driver to allow for softer string
tones as well. Both mechanisms can be combined.
Note range:
Educational uses:
As it turned out, <Hurdy> proved to be an excellent test- and demonstration
tool for classes in the acoustics of musical instruments. Particularly the theory
of inharmonicity of strings can be perfectly well demonstrated and proved. The
e-drive mechanism provides excitation at a mathematically exact 'harmonic',
yet one can easily show that maximum resonance for that overtone only occurs
if the string is retuned a bit for every 'harmonic'! It proves clearly that
'harmonic' overtones rather belong to the realms of religion than to those of
physics. We used these scientific facts as the underlying compositional base
for our composition 'Religionszwang',
a solo piece for <Hurdy>. Another version of the same piece is called
'Scientia Vincere Tenebras', using calculations and empirical data for real
inharmonic spectral components. A table with the calculated
inharmonicity for the low string can been by clicking this link. A table
for the high string here.
Music composed for <Hurdy>:
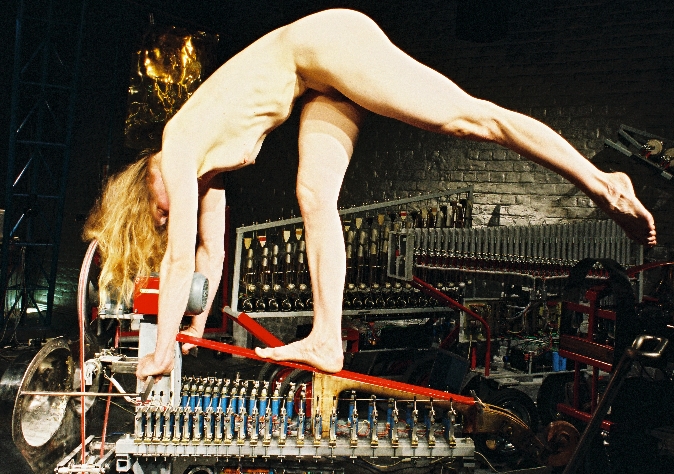
- Godfried-Willem Raes "GestroHurdy"
, for invisible instrument and a nude player (premiered by Emilie De Vlam)
- Godfried-Willem Raes "Aux
Arbres" for Hurdy [ part of 'TechnoFaustus'] (premiered by Emilie
De Vlam)
- Godfried-Willem Raes
"Hur Di Hur Ni", music theater for radar systems and Butoh choreography
(premiered by Emilie De Vlam)
- Barbara Buchowiec "Framed Ohne", music theater for Hurdy and Ake.
- Godfried-Willem Raes "Religionszwang"
for Hurdy solo. [MP3 download]
- Godfried-Willem Raes "Scientia
vincere tenebras" for Hurdy solo
[MP3 download]
- Godfried-Willem Raes "Butoh for Hurdy" (2009, premiered by Emilie
De Vlam)
Nederlands:
Robot: <Hurdy>

Hurdy, koosnaam voor Hurdy Gurdy is een automaat geinspireerd
op de traditionele draailier. Een strijkinstrument dus. Het eerste bovendien
dat het M&M robot orkest is komen vervoegen. Maanden intensieve en experimentele
research in het atelier van Stichting Logos gingen de bouw van deze automaat
vooraf. De konstruktie van de boog gaat verder op de -niet onverdeeld positieve-
ervaring opgedaan bij de bouw van onze automatische zingende zaag, <Flex>.
Het boogmateriaal is ook hier gemaakt uit plastische kunststof die doorlopend
van hars wordt voorzien in een recipient met loopwiel op kogellagers onderaan
de boog. De snelheid van de boogbeweging is over een uitermate ruim bereik regelbaar.
De boog wordt op kommando tegen de snaar aangedrukt met softshift magneten voorzien
van een wieltje. Softshift magneten zijn een speciaal type elektromagneet waarbij
de verplaatsing van het anker een lineaire funktie is van het toegevoerde vermogen
(het VA produkt). De aansturing van deze duwmagneten gebeurt met puls breedte
modulatie. Hierdoor kan de boogdruk nauwkeurig worden gestuurd, en daarmee ook
de dynamiek en expressie van het instrument. De boogdruk waarde kan worden voorafgegaan
door een korte puls, uiteraard ook weer stuurbaar, waarmee het initiele aanzetten
van de boog tegen de snaar met een kleine overdruk is geimplementeerd. Dit ontwerp
betekent een fundamentele verbetering op muzikaal vlak, tegenover de klassieke
draailier waarin de snaren met een primitief houten wiel worden aangestreken,
wat nauwelijks nuancespel toelaat. De trillingen van de snaren worden versterkt
middels twee inox membranen met pot volgens het principe van de indische gopi
yantra. De inox potten werden gelast op een hartvorminge inox plaat met drie-punt
bevestiging. In deze plaat werd onderaan een buiging aangebracht ter verlaging
van de resonantiefrekwentie. In plaats van fretten, zoals gebruikelijk op luiten
en gitaren, werden tangenten toegepast zoals in het klavichord. Een toets, zoals
op gebruikelijke strijkinstrumenten van kontrabas tot viool, bleek hier overbodig.
Uiteraard worden deze tangenten hier niet manueel ingedrukt, maar via sterke
(10N) en snel reagerende elektromagneten. De tangenten werden overtrokken met
een huls uit zacht PVC, wat aardig in de buurt komt van menselijke vingers.
Stalen veren werden bij wijze van experiment toegepast om de klank wat extra
galm en kleur te geven maar deze werden uiteindelijk weer verwijderd.
Voor het stemmechanisme maakten we gebruik van de kop van een
in de muzikantenslag gesneuvelde kontrabas. Een citaat als het ware. De beide
snaren hebben een gelijke lengte maar, aangezien ze in een interval van maximaal
twee oktaven worden gestemd, een zeer groot verschil in dikte. Hierdoor is er
een substantieel verschil in klankkleur tussen beide snaren. De snaarlengte
(trillend gedeelte) is niet minder dan 122cm, een stukje langer dus dan de snaren
van een kontrabas. Voor de laagste snaar gebruiken we aanvankelijk trouwens
een kontrabasnaar. Voor de hoogste snaar daareentegen, geharde inox staaldraad,
zoals gebruikelijk in pianos en moderne klavecimbels. De latere toevoeging van
een elektromagnetische aansturing, noopte ons deze snaarkeuze te wijzigen en
voor beide snaren staal te gebruiken.
De interne besturing van de behoorlijk ingewikkelde elektromechanika
werd gerealiseerd via drie afzonderlijke PIC kontrollers. Een eerste processor
vertaalt uit de binnenkomende stroom midi gegevens, de gevraagde toonhoogtes
en bestuurt de overeenkomstige tangenten. Hierbij konden we een fundamentele
verbetering aanbrengen in vergelijking met traditionale draailieren, maar ook
met alle traditionele gewone strijkinstrumenten: Voor alle noten hoger dan het
oktaaf boven de open snaar, drukken we zowel de tangent voor de gevraagde noot
als die voor de een oktaaf lagere noot op dezelfde snaar in. Hierdoor wordt
bereikt dat naast de aangestreken snaarhelft, ook de andere kant unisono kan
meetrillen, wat de klank zeer ten goede komt.
De tweede processor staat in voor de besturing van de strijkstok
motor. Deze kan in beide richtingen draaien en binnen een zeer ruim bereik in
snelheid worden geregeld. Zeer snelle snelheidswisselingen zijn evenwel niet
mogelijk, door de grote massa en de daaruitvolgende inertie van het bovenste
snaarwiel. Snel de draairichting wisselen is evenmin mogelijk. Omdat de motor
over een grote vermogensreserve beschikt, kan wel heel snel worden gestart.
In een later stadium overwegen we om aan deze euvelen tegemoet te komen, een
elektrisch gestuurde rem te monteren. De op deze robot gemonteerde lichten worden
ook door deze processor gestuurd. Ze werden gemapt op noot aan/uit informatie.
De PIC processor stuurt niet rechtstreeks de 3-fazen motor, maar
doet dit gebruik makend van een standaard industriele Siemens micromaster 410
motor controller. Hierdoor kon de automaat ook op gewone netspanning bedreven
worden en was driefazenstroom dus geen vereiste. Uit de binnenkomende midigegevens,
verwerkt deze PIC de volume kontrole informatie, die gemapt wordt op de rotatiesnelheid
en enkele afzonderlijke binaire kontrollers: draairichting, foutreset en motor
aan/uit. Het motor aan/uit kommando wordt ook automatisch gegenereerd, telkens
een note ON kommando binnenloopt.
De derde PIC processor tenslotte stuurt via twee afzonderlijke
pulsbreedte kanalen, beide softshift elektromagneten. De boogdruk wordt voor
elke noot afgeleid uit de waarde van het velocity byte dat steevast een midi
note-on kommando vergezelt. De mogelijkheid om de boogdruk te varieren tijdens
het strijken van een noot werd eveneens voorzien. Via midi kan dit worden gestuurd
met het note-pressure kommando (160 + kanaal, noot, druk).
Al bij al werden in deze automaat behoorlijk wat karakteristieken
van het menselijke snarenspel geimplementeerd. Een nochtans belangrijk aspekt
daarvan hebben we veronachtzaamd: de plaats waar de boog de snaar aanstrijkt
is bij <Hurdy> konstant. Om het instrument kwa toonvorming nog dichter
te laten komen bij wat strijkers kunnen, zouden we die plaats ook variabel en
stuurbaar moeten maken. Dit zou evenwel vergen dat we de gehele motor en boogkonstruktie
op een geruisloos beweegbare slede zouden moeten monteren. Bij een volgende
strijk-automaat zullen we zeker niet nalaten ook dit te voorzien.
In 2007 voorzagen we <Hurdy> van een mechanisme waarmee
de snaren ook langs elektromagnetische weg kunnen gestreken worden. De schakeling
die daarvoor instaat, en waarvoor beroep werd gedaan op een 16 bit ds-PIC kontroller,
ziet eruit alsvolgt:
Hiermee is het mogelijk ook zachte strijkgeluiden voort te brengen
die voorts nog volkomen vrij zijn van bijgeluiden. Voorwaarde voor een goede
werking is evenwel een absoluut zuivere stemming van de snaren. Deze moeten
immers door de elektromagneten in resonantie worden gebracht. De besturingssoftware
biedt ondersteuning om via sysex kommandos afwijkende stemmingen te gebruiken
wanneer ook de positie van de fretten wordt aangepast. Het program change kommando
kan worden gebruikt om een andere lookup tabel te gebruiken voor de stemming.
Als mikrokontroller opteerden we voor deze schakeling voor een MicroChip dsPIC30F3010-I/SP.
Om minder bijgeluiden te krijgen door het aanslaan van de tangenten,
voegden we meteen ook twee met vilt beklede dempers toe voor de niet klinkende
kant van de snaar.
Midi implementation:
Note off commands:
Note OFF: &H80 + 9, note, 0 : release tangent from string. [ &H80 =
128], release bow pressure
Note OFF with velo: &H80 + 9, note, 1-127: damp string using the felt damper,
further all actions mentioned above will also be performed. Notes 40-63 will
damp the low string (any note value in the range will do), notes 64 - 120 will
damp the high string.
Note on commands:
Note ON: &H90 + 9, note, velo: push tangent(s) against string. The velo
byte determines the bow pressure applied at the start of the note. [ &H90
= 144]. If you want to make use of the electromagnetic string driver, you have
to send controller 5 (low string) and/or 6 (high string) and set it to the value
1. Now the bow mechanism will no longer make contact with the string and the
e-drive will use the velo value to determine the excitation force. The electromagnetic
string driver requires you also to send the controllers 69 and/or 70 (on/off)
if required. If you set the controllers 5 and 6 to the value 2, both mechanisms
can be used together. Bow initial pressure and electromagnetic excitation will
be controlled by the velo byte. Note-aftertouch can still be used to modulate
the bow pressure whilst the note is sounding. The e-drive strength in its turn
can still be controlled using controllers 3 and 4. These are active as long
as the e-drive mechanism is activated.
Lights: (mapped on note on/off)
- &H90+9, 0, 0 or &H80+9,0,0 : light left OFF
- &H90+9, 1, 0 or &H80+9,1,0: right light OFF
- &H90+9, 0, 127: light left ON
- &H90+9, 1, 127: right light ON
Key Pressure commands:
&HA0 + 9, note, pressure: If users want to modulate bow pressure during
the playing of a note, they have to send a note pressure command for the sounding
note . [&HA0 = 160]. If you want electromagnetic activation of the string
only, key pressure has to be zero.
Controllers:
&HB0 + 9, 1, value: controlls the width of the pulse (0-50ms) that precedes
the velocity-byte determined PWM applied to the bow pushing solenoid for the
low string.
&HB0 + 9, 2, value: controlls the width of the pulse (0-50ms) that precedes
the PWM applied to the bow pushing solenoid for the high string.
&HB0 +9, 3, value: amount of electromagnetic drive injection on the low
string [2007]
&HB0 +9, 4, value: amount of electromagnetic drive injection on the high
string [2007]
&HB0 + 9, 5, value: value=0 means bow active, value=1
means e-drive active, value=2 means both active LOW string.
&HB0 + 9, 6, value: value=0 means bow active, value=1
means e-drive active, value=2 means both active HIGH string.
&HB0 + 9, 7, volume: controls bow motor speed [&HB0 = 176]
&HB0 +9, 20, value: note the low string is tuned to (default = 40) Sending
this is essential to make the electromagnetic drive for the low string operational.
The legal range for the value is limited to 14 to 60 . The default value on
startup is 40. [2007] . The real tuning of the low string on 04.04.2007 is midi
note 33 (low A).
&HB0 +9, 21, value: note the low string is tuned to (default = 64) Sending
this is essential to make the electromagnetic drive for the high string operational.
The legal range for the value is limited to 14 to 96. The default value on startup
is 64. [2007] The real tuning of the high string on 04.04.2007 is midi note
50 (D).
&HB0 +9, 22, value: Flageolet-playing mode for the low string The values
0 or 1 turn this mode off. Other values (2 - 32) specify the integer multiplier
factor for the excitation frequency. If value = 2, thus the string will sound
the octave harmonic of the note selected by the note on command. [2007]
&HB0 +9, 23, value: Flageolet-playing mode for the high string. The values
0 or 1 turn this mode off. Other values (2 - 32) specify the integer multiplier
factor for the excitation frequency. If value = 2, thus the string will sound
the octave harmonic of the note selected by the note on command. [2007]
&HB0 +9, 24, value: Cent correction for the playing note on the low string.
One unit of value corresponds to 1 cent. [2008]
&HB0 +9,25, value: Cent correction for the playing note on the high string.
One unit of value corresponds to 1 cent.[2008]
176 + 9, 64, 0 or not 0 : switches the felt dampers on
or off. If the controller is set to true (1-127) the damper will never be activated
on note off's. If it is set to 0, the damper will be activated by real note
off commands. [2007]
176 +9, 65, 0 or not 0: If set to false, the bow motor will not get a start
instruction on a note ON command. If set, note ON commands will make the motor
turn and it will stop on reception of explicit note off commands for both strings.
176 + 9, 66, 0 or not 0: Start/stop switch for the bow motor
176 + 9, 67, 0 or not 0: Clockwize (cw) or counterclockwize (cww) rotation
of bow wheel. Note that the direction of rotation command will be ignored if
the motor is still running.
176 + 9, 68, 0 or not 0: Clear error condition on motor controller.
176 + 9, 69, 0 or not 0: enable electromagnetic string driver for the low string.
Make sure you send controller 20 with the correct value corresponding to the
actual tuning of the low string. [2007]
176 + 9, 70, 0 or not 0: enable electromagnetic string driver for the high
string. Make sure you send controller 21 with the correct value corresponding
to the actual tuning of the high string. [2007]
176 + 9, 71, 0 or not 0: switches the low string damper
unconditionally on, for as long as the value stays true. This overrides the
settings for controller 64. When the controller becomes 0, the operational mode
as set with controller 64 becomes active again.
176 + 9, 72, 0 or not 0: switches the high string damper
unconditionally on. Functions the same way as the above controller.
176 + 9, 92, 0 or not 0: switch for later expansion (video cameras) not
yet implemented
176 + 9, 123, 0: all notes off command. (stop motor, release tangents from
string, release softshift solenoids, lights Off, electromagnetic drive off,
release the dampers). The command does not reset the pitch controllers for the
string tuning (20 and 21). These controllers are reset to their default values
(40 and 64) only on a cold startup of the entire robot. (Pic4).
Program change commands:
192 + 9, value: program change commands to use different fingering tables and
pitch lookup tables for the electromagnetic drive. Value 0 resets the instrument
to the default values and lookups. The three lowest bits (b0, b1, b2) of the
selected program number select one of the 8 fingering look-up tables. Bit b3
is as yet unused. The three lowest bits of the high nibble of the selected program
number select one of the 8 lookup tables for the e-bow frequency driver. So,
the derivaltion of the program to select is simply: freq-lookup number * 16
+ finger-lookup number. Details on the lookups themselves
to be documented later. [2009]
Pitch bend commands:
224 +9, lsb, msb: not implemented. Use controllers 24 and 25 instead. The standard
midi pitch bend appeared impossible to implement, since this a biphonic instrument.
Afmetingen & andere technische specifikaties:
- hoogte: 1300mm
- breedte: 600mm
- lengte: 1600mm
- gewicht: ca. 120kg
- maximale geluidsdruk: 96dBA (met boog mechanisme)
- polyfonie: 2 onafhankelijke toonhoogtes
- tessituur: 40-88, maar transponerend afhankelijk van besnaring en stemming
(tentatief: midi 33 en 50, voor een La-re stemming. In deze stemming wordt
het werkelijk bereik dan 33-74 en met inbegrip van de flageoletten, 33-126)
- data-poort: Midi port. (hardwired/firmwared to listen to midi channel 9)
or midi via UDP/IP.
- Verzekeringswaarde (produktiekost): 13.500 Euro.
Design, research en staalkonstruktie: dr.Godfried-Willem
Raes
Atelier medewerkers:
- Johannes Taelman (PIC microcontrollers microkode)
- Kristof Lauwers (test kode in GMT)
- Xavier Verhelst (kontrabas expert)
- Moniek Darge (kleuradvies & requisieten)
Bouwdagboek:
Zoals voor vele vroegere robots, hebben we ook voor <Hurdy>
een beknopt bouwdagboek bijgehouden:
- 26.04.2004: eerste ideen en konkrete tekeningen.
- 20.05.2004: metingen Bauer Danfoss motoren, type BG05-11/D05LA4 met het
oog op toepassing als strijkstokmotor. Dit type werkt op driefazenstroom en
heeft een tandwielkast met vertragingsmechanisme.
- 21.05.2004: eerste uitwerking PIC controller besturing i.s.m. Johannes Taelman.
- 22.05.2004: konstruktie onderwiel voor de boog met harsvoorziening.

- 23.05.2004: restauratie en rekuperatie kontrabas kop met stemmechanisme
en krul.
- 24.05.2004: berekening van de toe te passen snaren: kontrabas Re-snaar en
cello La-snaar
- 26.05.2004: plasma snijwerk houder in inox voor de membraanpotten
- 27.05.2004: eerste addenda in GMT voor software support
- 29.05.2004: konstruktie drukwieltjes op softshiftmagneten voor boogdrukbesturing.
Montage kontrabas hals op frame.
 Bestelling
bij Laukhuff geplaatst voor de 48 tangentendrukmagneten (traktuurmagneten,
10N, 24V). De softshift magneten, te zien op onderstaande foto met gemonteerde
wieltjes, zijn van Lucas Ledex.
Bestelling
bij Laukhuff geplaatst voor de 48 tangentendrukmagneten (traktuurmagneten,
10N, 24V). De softshift magneten, te zien op onderstaande foto met gemonteerde
wieltjes, zijn van Lucas Ledex.
- 31.05.2004: Inox TIG draagbeugel drukwielen boog. Laswerk tangentendrager,
bassnaar. Draaiwerk as en nylon bussen voor onderwiel boog.
- 01.06.2004: Jammerlijke mislukking laswerk Inox resonatoren op frontpaneel.
Materiaal blijkt veel te dun...
- 02.06.2004: Pogingen tot redding resonatoren met brasseren (koper op inox,
met acetyleen). Buiging inox resonator, onder hart. Laswerk en montage voorwielen.
Laswerk vork achterwiel. Draaiwerk assen wielen. (25mm).
- 03.06.2004: Laswerk draaiend wiel aan chassis. Eindmontage wielbasis. Montage
inox resonatorfront en eerste tests op geluidsproduktie. Positionering hals
en eerste tentatieve besnaring. Twijfels over korrekte werking van de tangenten
rijzen: de drukkracht moet bijzonder groot zijn. Eventueel zal een toets toch
nodig blijken.

- 04.06.2004: Buigen en op maat brengen tangenten. Bekleding met PVC pootsokjes
5mm uitgetest. Voorlopige montage tangentenrail.
- 05.06.2004: Blokschema elektronische schakelingen uitgetekend. Berekening
voedingen afgewerkt. Tangentendrager steunen opgelast. Jacht op inox potten
geopend...
- 06.06.2004: Experimenteersessie met veerkoppelingen op resonatoren. Dit
veroorzaakt een uitgesproken galm in het instrument.
- 07.06.2004: Stuurstang gelast uit 25mm inox buis, met lasbochten. Inox trillinggeleiders
gelast op frontale trilplaat. Toets bijgeslepen.
- 08.06.2004: Assen gedraaid voor aandrukwielen boogmechanismen (5mm geharde
asjes). Stuurstang vastgelast op vork van draaiend wiel (inox buis 25mm, 2mm
dik).
- 09.06.2004: Drijfwiel vervangen door gebalanceerd stalen exemplaar. Onderwiel
eveneens vervangen door een beter gecentreerd 130mm wiel (riemschijf). Aandrukwiel
voor hoge snaar gedraaid uit aluminium: grotere flens gemaakt, kleinere draaidiameter.
Werkt beter, dus ook wieltje gedraaid voor lage snaar. As blijft 5mm. Bij
hoge boogsnelheid en grote boogdruk ontstaan erg interessante multiphonics:
het instrument komt dan erg dicht te staan bij de intonarumori van Russolo.
Experimenten uitgevoerd met kontrabassnaren en klassieke darmsnaren (gamba/
violone).

- 10.06.2004: Fine adjustment of bow mechanism. Voorbereidend schilderwerk
in zinkfosfaat primer.
- 11.06.2004: Motor controller Siemens Micromaster 410 gemonteerd en uitgetest.
Werkt tot en met frekwenties van minder dan 1Hz. Onderste draaiwiel boog uitgedraaid
tot binnendiameter 112mm op draaibank. De aandrukkracht (spanning) van de
softshift magneten is van primordiaal belang voor de toonvorming!
- 12.06.2004: Laswerk 360 x 250 mm chassis elektronische schakelingen: plaats
voorzien voor maximaal 8 eurokaarten (100x160), recto verso. De motorcontroller
en de Sitop voeding voor de softshift magneten komen recto verso naast de
vertikale motorkolom. Elektronika chassis voorzien van zinkfosfaat primer.
- 13.06.2004: Bestukking en soldering noot-PC boards voor tangentensturing.
(48 mosfets IRL640). Ontwerp tangenten PIC board. Voorbereiding schakelkast:
midi IN/THRU en 230V ac aansluitingen.
- 14.06.2004: Bespreking PIC software met Johannes Taelman. Afwerking schakelkast
met Midi I/0 en 5V power supply. Schakelschemas PIC controller afgewerkt en
op de web pagina toegevoegd.
- 15.06.2004: Finalisatie soldeerwerk schakelkast en voeding, kabelboom gemonteerd.

- 16.06.2004: ontwerp PIC boards 1&2. Levering traktuurmagneten Laukhuff.
- 17.06.2004: opbouw PC board voor PIC1 en PIC2. Eerste montage tangenten
door Bert. Ontwerp PC board voor PIC3, softshift controller. Bespreking software
implementatie met Johannes Taelman.
- 18.06.2004: afwerking PC board voor PIC controller 3: softshift besturing
met PWM. Uitgevoerd met twee IRF540 mosfets gemonteerd op extra grote koelprofielen.ICL7667
chips van stal gehaald voor de uitsturing.
- 19.06.2004: bedradings werkzaamheden: PIC3 board naar voeding en softshift
magneten, PIC2 naar motor kontroller, PIC1 naar mosfetdrivers. Alle voedingen
getest, midi I/O aangesloten, datalijnen klaar. Berekening snaarspecifikaties.
Opstelling volledige midi specifikatie voor implementatie in de PIC kontrollers.
- 20.06.2004: bedrading tangenten. Kontrabaskrul en toetsrestant vastbeschroefd
op stalen konstruktie.

- 21.06.2004: finalisatie bedradingen, inklusief lichten. Aanmaak laatste
ontbrekende tangenten. Nameten op kortsluitingen. Test met voedingsspanningen.
Alleen de geprogrammeerde PIC's ontbreken nu nog... Uitvoerige tests op geschikt
snaarmateriaal. De voorziene twee oktaven verschil tussen beide snaren dikteert
een lagere tessituur voor Hurdy dan oorsrponkelijk voorzien. Immers met als
laagste snaar een Mi , midi 40 moet de hoogste snaar op midi 64 worden gestemd
wat bij een snaarlengte van 122cm tot een materiaaldikte leidt van ca. 0.3mm.
Dit blijkt te dun om goed aangestreken te worden. Wanneer we als laagste snaar
een kontrabas La snaar nemen (midi 33) en die ook op midi 33 stemmen (Hurdy
heeft een iets grotere snaarlengte dan een kontrabas, waardoor deze stemming
de snaar op zeker 10% boven zijn normale spanning brengt), moet voor de hoogste
snaar staaldraad met diameter 0.5mm worden gebruikt. Om hiermee te stemmen
op midi noot 57, zitten we echt wel op de breukgrens van de snaar. We overwegen
dan ook voor de laagste snaar een kontrabas Mi snaar (Midi 28) te gebruiken
en voor de hoogste, staaldraad diameter 0.6mm wat prima klinkt op midi noot
52. Een groot klankkleur verschil tussen beide snaren moeten we nu wel mee
in koop nemen.
- 22.06.2004: Test met kontrabas La snaar, gestemd op sol (midi 31) en staaldraad
0.5mm, gestemd op midi 55. Eerste tests met PIC controllers...
- 23.06.2004: Midi input circuit improved: collector resistance of 330 Ohms
leads to much faster operation after the data sheet. However, the clean pulses
we obtain by doing so, do not descend beyond 3V, and thus do not trigger the
7414 invertors.
- 24.06.2004: Tested with GMT interface... nothing works anymore... Alle PWM
kanalen blijken omgekeerd te werken. De motor kontrole bits eveneens. Dit
moet in de PIC software geinverteerd worden. De midi signalen blijken onbetrouwbaar
en leiden tot raar gedrag vanwege de PIC's. Ofwel hebben we sterke spikes
van de smps's (en/of groundloops) , ofwel een defekte optocoupler.
- 26.06.2004: Nieuwe testkode geschreven in GMT. Pi-filters berekend voor
HF ontstoring.
- 27.06.2004: Test PIC software: verschillende bit-inversies nodig. Glitch
problemen nog niet afdoende opgelost. Nieuwe Sol-55 snaar gemaakt in 0.5mm
staaldraad. PIC-kode rapport opgesteld voor Johannes.
- 28.06.2004: PWM sturing softshift magneten blijkt problematisch. Vanzodra
we de spoelen aanleggen, komen er zodanig veel spikes op zowat alle lijnen
te staan, dat alle PIC's in war slaan... De PWM frekwentie moet wellicht verlaagd
worden... Nieuwe PIC's geprogrammeerd met Johannes Taelman. 100nF caps toegevoegd
vlak bij de pootjes van de PIC's. Dit bleek de remedie tegen de glitches op
de voeding. Zonder dezer cap's deden de PIC's om de haverklap pogingen tot
restart. In grote lijnen werkt de PIC mikrokode nu goed.
- 29.06.2004: 74HCT14 vervangen. Eerste exemplaar was stuk vanwege een toevallige
aanraking met een netspanningsvoerende losse draad... Optocoupler vervangen
door CNY27-4 met 1k8 kollektorweerstand. GMT besturingskode herschreven: nu
met afzonderlijke besturing voor beide snaren. Laagste snaar vervangen door
kontrabas E-snaar. Spreekt moeilijk aan met de tangenten in aktie. Ook de
toonhoogte is nu te laag voor de gebruikte resonatoren. Alleen met piepschuimversterkers
wordt de toon werkelijk imposant. Dit is echter geen duurzaam verwerkbaar
materiaal.

- 30.06.2004: Slede gelast voor verstelbare assen onderaan de boog. Deze slede
wordt op het onderwiel met harshouder gemonteerd. Als assen gebruiken we naven
van fiets voorwielen. Laagste snaar vervangen door staalsnaar 1.4mm, gestemd
op Do, midi 36. Drukkracht tangenten nagemeten: met 27V bedrrijfspanning halen
we 7 Newton. Bert doet tangenten afregeling onderste snaar.

- 01.07.2004: Afregelingen tangentenreeks hoge snaar. Afwerking rollagers
(naaf vooras fietswielen) voor boog.
- 02.07.2004: Do-stemming blijkt zo goed als onhoudbaar. De hoge snaar kan
met geen enkel voorhanden snaarmateriaal op Do-60 gestemd worden. Experimenten
met Sol stemming: lage snaar: staal 1.4mm , gestemd op sol 31, hoge snaar,
staal 0.5mm, gestemd op Sol-55: snaarbreuk op 49... Stemming met oktaafverdubbeling
op La (33) en voor de hoge snaar op La (45), staal 0.6mm snaar is werk- en
stembaar. We verliezen dan wel een oktaaf en tessituur.
- 03.07.2004: Software geschreven voor de mensurering en volledige berekening
van snaren. (PB-CC compiler). La(57) voor de hoge snaar blijkt alleen mogelijk
met snaardiameter 0.3mm, wat erg dun klinkt.
- 04.07.2004: Achterwiel + handvat in inox definitief gelast en gemonteerd.
Zinkfosfaat aangebracht op later niet meer te bereiken plekken.
- 05.07.2004: Eindmontage tangentenhouder met inox inbus M10 bouten.
- 06.07.2004: Kristof Lauwers aan het werk gezet voor het schrijven van een
stem- en evaluatie interface binnen GMT. Firmware op site beschikbaar gesteld.
- 07.07.2004: werk op laag pitje vanwege akute longontsteking...
- 08.07.2004: Hurdy opgesteld in het M&M robotorkest. Kristof belast met
uitzoeken tangent optimalisatie tabellen.
- 16.07.2004: PIC firmware aangepast met Johannes Taelman en Kristof Lauwers.
- 19.07.2004: PIC firmware PIC3 changed to implement prepressure controllers
(ctrl 1 and 2) (0-50ms for midi range 0-127) Firmware PIC1, lookup tangents
changed, so that we get better speach from the string.
- 20.07.2004: premiere of "Hur Di Hur Ni", with Emily De Vlam
- 22.07.2004: second performance of "Hur Di Hur Ni"
- 15.08.2004: coding solo piece "Aux Arbres" for Hurdy.
- 16.09.2004: kollofaanmolen gebouwd voor produktie zeer fijn harspoeder.
- 08.10.2004: kollofaan reservoir verbeterd: naafhouderslede opgelast en herschilderd.
- 09.10.2004: nieuw rollager gemaakt voor booggeleiding. Stemming gewijzigd:
nu 33 & 50: oktaaf + kwart.
- 10.10.2004: verder werk aan Aux Arbres, demo stukje voor Hurdy.
- 11.10.2004: tweede rollager toegevoegd aan booggeleidingsmechanisme.
- 18.10.2004: oscillatie problemen met de inhoud van sommige latches. Debug
sessie nodig voor de tangenten PIC.
- 12.11.2004: hulzen rond tangenten vervangen door harder polyethyleen.
- 30.08.2005: Objekt voor Hurdy toegevoegd in kode voor TransiTrance in Technofaustus.
Bespeling voorzien voor de rol van homunkulus (Emilie De Vlam).
- 18.11.2005: LED lampje toegevoegd op schakelkast.
- 25.01.2007: Labo proeven ter voorbereiding van een elektromagnetische aansturing
van de snaren, als alternatief voor de boog. Hiermee moet ook het spelen van
flageoletten goed mogelijk worden. De midi implementatie van de aansturing
stelt echter grote problemen.
- 28-29.01.2007: Toroidale elektromagneten met een luchtspleet waardoorheen
de snaar gaat blijken het sterkste magneetveld op te leveren. Het elektrisch
vermogen nodig om de snaar akoestisch voldoende luid te doen trillen beloopt
evenwel 50 tot 100Watt. Ook aan de precizie en frekwentiestabiliteit van de
generator worden hier hoge eisen gesteld. 16 bit nauwkeurigheid is hier zeker
geen lukse. Ideaal zou zijn te kunnen beschikken over ferriet torussen (ringkernen)
met een luchtspleet.
- 01.02.2007: proeven met elektromagnetische aansturing van de snaren door
er de bekrachtigingsstroom doorheen te laten lopen terwijl de snaren tussen
de poolschoenen van sterke permanente magneten worden gevoerd. Deze proeven
dokumenteerden we in onze kursus akoestiek: 4048.html.
- 02.02.2007: proefopstelling onder gebruikmaking van 20W luidspreker 100V
lijntransformatoren waarvan we het I-blikpakket verwijderden blijken nog de
beste resultaten op te leveren. Hierbij sturen we de 8 ohm wikkeling aan met
een BUZ345 power mosfet gevoed vanuit ca. 6V en uitgestuurd met een signaal
van op 0.05% de juiste frekwentie. Begin konstruktie inox draagstruktuur voor
beide aldus opgebouwde elektromagnetische drivers. De draagstruktuur kan aan
de motorkolom bevestigd worden. De hele konstruktie moet wel uit niet magnetisch
materiaal vervaardigd worden , vandaar de keuze voor inox 304L. Voor de aansturing
zullen we twee DS pics nodig hebben, met veel ruimte voor lookup tables voor
de juiste frekwenties.
- 05.02.2007: Solderen printboard voor de string driver en mikrokontrollers.
- 06.02.2007: Bespreking met Johannes Taelman van de dsPIC implementatie.
De look up tables voor de nodige deelfaktoren berekenden en optimaliseerden
we in deze tabel. (ascii bestand). We gebruiken
best twee afzonderlijke dsPIC's hiervoor.
- 08.02.2007: Microchip dsPIC30F3010-30I/SP mikrokontrollers besteld via Farnell.
- 09.02.2007: Breadboard schakeling voor de dsPIC ineengezet. We voorzien
ook twee ingangen waarmee we voor testdoeleinden een toongenerator kunnen
aansluiten op de ingangen van de 7667.
- 10.02.2007: Afwerking e-drive board. Hardware tests.
- 11.02.2007: montage board op Hurdy, middels aluminium chassisplaat. Bedrading
voedingen en midi input. Midi implementatie uitgewerkt en aangepast.
- 12.02.2007: afwerking bedrading Weidmueller konnektors naar de magneten.
Eerste test: BUZ345 gesneuveld door de toch te grote induktiestoten veroorzaakt
door de elektromagneten (ofwel -hoewel onwaarschijnlijk- door een fout met
de frekwentiegenerator). De maximale spanning over de BUZ345 is immers slechts
100V.
- 13.02.2007: test met toongenerator aangesloten op de testingangen van de
schakeling. De voeding (Siemens Sitop afregeld op 14V) gaat in begrenzing
en blijkt niet voldoende vermogen te hebben. Ofwel moeten we een voeding met
een groter vermogen toepassen, ofwel de duty cycle van de bekrachtigingspulsen
(nu 50%) verkleinen. De klank is in elk geval heel goed. Levering van de 16
bit PIC kontrollers dsPIC30F3010 30I/SP.
- 14.02.2007: bestelling staaldraad 1.5mm bij Algoet Veren (Waregem). Dit
blijkt de grootste standaard maat te zijn in sterkteklasse C. (ca. 1850 N/mm2
treksterkte). Het wachten is nu op PIC kode: Johannes Taelman.
- 15.02.2007: opmeting induktie en impedantie van de snaardriver magneten.
De impedantie blijkt sterk gedaald door het wegnemen van het I-blik uit de
transformatoren. Hurdy kan ook als kwarttoonsinstrument ingezet worden, wanneer
we twee gelijke snaren, een kwarttoon verschillend gestemd, op het instrument
aanbrengen. De konsekwenties voor de PIC implementatie daarvan moeten nog
verder bestudeerd en uitgerekend worden.
- 22.02.2007: Nieuwe PIC-specs opgesteld voor Johannes Taelman. Levering nieuw
snaarmateriaal. C-grade veerstaaldraad 1.5mm. Test met elektromagnetische
aandrijving van de lage snaar met veelbelovende resultaten. Een strijkklank
kan inderdaad bereikt worden en de responssnelheid is zelfs beter dat initieel
verwacht.
- 13.03.2007: Demo voor Johannes Taelman. Werkdiskussie PIC implementatie.
- 14.03.2007: Werksessie rond de dsPIC kode van de e-drive mechanismen. PIC-spec
file geupdate. (txt file, open with notepad+ or source code editor)
- 26.03.2007: eerste werkende firmware voor de dsPIC klaargemaakt. Principieel
werkt het al...
- 02.04.2007: ds-PIC opnieuw geprogrammeerd, nu met alle voorziene kontrollers
en besturingswijzen. De mosfets hebben het bij de proeven klaarblijkelijk
begeven... Wellicht door overspanning vanwege de spanningsstoten bij hoge
frekwenties.
- 03.04.2007: Herstelling hardware: klaarblijkelijk was er geen enkel onderdeel
stuk... debug sessie vanuit GMT.
- 04.04.2007: Verdere opmetingen en evaluatie. Tangenten bovenste snaar gestemd
en opnieuw afgeregeld. Bugs in de mikrokode gedokumenteerd en doorgeseind
naar Johannes.
- 30.10.2007: Debug van Hurdy opnieuw aangevat. Stand van zaken opgemaakt.
Boogriem opgeruwd met schuurpapier. De terugslagdiodes van het e-drive mechanisme
voor de hoge snaar worden verdacht heet.
- 31.10.2007: eerste ontwerp voor een dempermechanisme, te monteren tussen
het eind van de hals en de eerste tangent. Midi implementatie uitgebreid.
- 01.11.2007: Beide dempers voor de snaren gebouwd en gemonteerd. Besturing
daarvoor toegevoegd op het PC board voor PIC3. Bedrading aangepast en afgewerkt.
Kortsluiting op de tangentenmagneet van noot 60 verholpen. Persistent maar
onvoorspelbaar terugkerende sluiting op noot 61. Wellicht een shaky mosfet...

- 02.11.2007: Nieuwe PIC spec lists bezorgd aan Johannes Taelman. Nieuw midi
input board geassembleerd voor montage in de switch box. De schakeling uit
2004 bleek niet helemaal betrouwbaar, wellicht vanwege de te trage optocoupler
(4N27) die we toen gebruikten. Nu gebruiken we de 6N137. We bouwden een geheel
nieuw midi-driver boardje op en monteerden het in het deksel van de hoofschakelaar.
De fout op noot 61 is niet te wijten aan de mosfet maar klaarblijkelijk een
fabrikagefout in de elektromagneet die alleen optreedt na enige opwarmtijd.
- 03.11.2007: Extra SMPS voeding (Traco TXL 150-12S) toegevoegd voor de e-drives:
12V/12.5A, maar zelfs deze voeding gaat in verzadiging bij uitsturing van
de e-drives met lage frekwenties en hoge PWM waarden...
- 04.11.2007: To be changed: the ICL7667 mosfet driver on the e-drive board
now gets its power, via a 7810 regulator, from the 12V solenoid power supply.
This should be changed! We have to feed it from an autonomous supply, for
instance the 14V from the PWM softshifts, since these are rarely used in combination.
Also we may consider to put 1 Ohm resistors in series with the e-drive solenoids,
thus also reducing dissipation in the back diodes getting very hot now...
With 2.2 Ohms, nothing works anymore... Total failure for 30F3010 PIC now.
The reason is a mystery to us... maybe a strong glitch or spark.
- 05.11.2007: Extra power supply connection for +14V from Sitop added on e-drive
board. Just for powering up the ICL7667 mosfet drivers. The 30F3010 remains
as death as ever.
- 06.11.2007: Verder ontwikkelingwerk aan Hurdy stilgelegd. Eerste afspraak
met Johannes kan pas vrijdag. Voor het overige zijn er nu teveel koncerten
bij Logos om er nog rustig te kunnen werken.
- 09.11.2007: PIC1, PIC3 en PIC4 opnieuw geprogrammeerd. PIC4 vervangen, de
30F3010 was gesneuveld.
- 10.11.2007: Test kode aangepast. Nieuwe debug en test sessie.
- 11-13.11.2007: 'Religionszwang' voor Hurdy solo geschreven... De pendant
van dit stuk wordt 'Scientia Vincere Tenebras'.
- 13.11.2007: Uitwerking van een pitch-bend implementatie voor de akoestische
inharmonische korrektie van de deeltonen in <hurdy>.
- 14.11.2007: Eerste proefopname gemaakt van 'Religionszwang'.
- 15.11.2007: Een groot probleem bij Hurdy is dat de tangenten vrij veel bijgeluiden
veroorzaken bij het afknijpen van de snaren. Het gebruik van zachtere kunstofhulzen
op de tangenten kan hier weliswaar soelaas brengen, maar naarmate we deze
hulzen zachter maken, klinken de flageoletten ook zwakker. Voor een biljante
toon moeten de tangenten eigenlijk juist meshard zijn. Een oplossing zou kunnen
zijn het eerste trajekt van de tangentmagneten geleidelijk te maken -door
PWM sturing over ca. 50ms- en dan pas -nadat de tangent de snaar raakt- de
aandrukkracht tot het maximum op te voeren.
- 18.01.2008: PIC4 firmware uitgebreid met controllers 24 en 25 voor het precies
afstemmen van de snaarresonanties. Het spelen van 'Scientia Vincere Tenebras'
wordt nu mogelijk...
- 31.01.2008: aanpassing driver software in GMT.
- 28-29.02.2008: Funkties voor de inharmoniciteit van snaren toegevoegd in
<GMT> en in de testkode voor <Hurdy>.
- 01.03.2008: Nieuwe opnames gemaakt van 'Scientia
vincere tenebras' en 'ReligionsZwang'.
- 02.03.2008: Kode optimalisatie en nameten inharmoniciteit versus de berekende
lookups.
- 18.07.2009: Kompositie van 'Butoh for Hurdy' gebruik makend van het doppler-sonar
systeem voor sturing van de robot via bewegingen van een naakte butoh danser
bovenopen en rond de robot zelf.

- 24.07.2009: problemen met de terugslagdiodes op het e-drive board: die worden
veel te warm en dissiperen veel teveel van de energie. Zouden we hier niet
beter VDR's toepassen ter bescherming van de mosfet? Een experiment met een
1nF kondensator in plaats van de terugslagdiode doet de mosfet wel warm worden,
maar geeft heel wat beter -zij het wat elektrisch klinkend- geluid. Alvast
40V VDR's besteld bij Farnell.
- 25.07.2009: The Cornell-Dubilier mains filter was sputtering, so we wanted
to replace it. The replacement filter, after leaving it on in the lab for
an hour, exploded heavily, releasing quite some PCB's... So, we replaced the
filter with a European made DEM FLCR630501 filter. ( 2x 1mH//680kOhm, 2x470nF,
2x 10nF).
- 26.07.2009: The VDR-cure appears to be unworkable. They dissipate way to
much and get dangerously hot. Why do these devices do not exist with higher
power ratings?
- 27.07.2009: Terugslagdiodes op het ds-PIC board vervangen door twee 100W
zenerdiodes BZY91C16 van Philips. Dit lijkt wel goed te werken. Het elektrisch
klinkend geluid is nu volledig weggewerkt en de warmteontwikkeling op mosfet
en diode is onder kontrole. Probleem is wel dat dergelijke high power zener
diodes niet meer worden gefabriceerd... We hebben er nog enkele op voorraad.
Ze waren bovendien ook heel erg duur..
- 28.07.2009: Frontale lampen vervangen (20W/12V halogeen).
- 29.07.2009: Hurdy wordt gebruikt in het programma rond middeleeuwse muziek.
- 15.08.2011: Netfilter opnieuw defekt. Tijdelijk verwijderd.
- 22.08.2012: Hurdy in gebruik in het oude muziek koncert rond het Llibre
Vermell. Stemming gewijzigd.
- 03.09.2012: Riem gebroken. Bij onderzoek bleek die vol barstjes te zitten
en was dus helemaal verstorven. Zoeken naar betere oplossing. Geslepen V-riem
gebruiken?
- 13.09.2012: Riem vervangen door een V-riem type XPZ1900 / 3VX710, Quad Power
III (ingekocht bij MEA). Dit type heeft een gladde achterkant.
- 27.11.2013: Nieuwe experimenten met de nieuwe riem en het aandrukmechanisme.
De softshift magneten blijken niet sterk genoeg om de boog tegen de snaar
aan te drukken. Wellicht is ook het tangentenmechanisme aan een herziening
toe.
Bibliography:
ROSSING, Thomas.D (editor), "The
Science of String Instruments" ed: Springer NY, Stanford CCRMA, 2010
ISBN 978-1-4419-7109-8
Last update: 2017-08-01
by Godfried-Willem Raes
| PICTURES OF HURDY IN PERFORMANCES |
Robody Pictures: |
|
|
| picture 1 (high resolution,
with Emilie De Vlam) |
picture 2
(with orchestra) |
picture 3 (with
Emilie De Vlam) |
picture 4 (With
Emilie De Vlam) |
Maintenance and repair information:
Bow motor specs: Bauer-Danfoss type BG05-11/D05LA4, 0.12kW (230V - 0.73A
or 400V /0.42A) Cos Phi = 0.73. n1= 1350 rpm, n2 = 117 rpm at 50Hz motor power
frequency.
Controller specs: Siemens Micromaster 410, input 200-240Vac, max. motor
power 0.25kW. [order nr.: 1P 6SE6410-2UB12-5AA0 ], with control panel [order
nr.: 1P 6SE6400-0SP00-0AA0].
String tangent solenoids: August Laukhuff - Trakturmagnet, 24V 0.5A
@ 100%DC - 10 Newton 
String tangent solenoid power supply: 24V - 4A, SMPS
String damper solenoids: August Laukhuff - Tonventilmagnet, 24V/ 94
Ohm - 6-7.5 Newton (nr. 300910)
PIC controllers: PIC18F252 (3x), dsPIC30F3010 (1x). The PIC18F252 is
no longer in production but can be replaced with the PIC18F2525.
Softshift solenoid power supply: Siemens Sitop power flexi (adjustable
output voltage). Adjust to 14V. (Safe value for PWM 100%)
e-drive power supply: TRACO POWER TXL 150-12S (input: 88-264V ac, universal;
output: 12V - 12.5A). Site: http://www.tracopower.com
Softshift Solenoid data:
Horizontal softshift solenoids for bow pressure: Ledex Softshift type 5EP,
number 193015-026. Cold DC resistance 10.3 Ohm. Nominal working voltage at 100%
duty cycle:
- 14V (force = 8 Newton), Current 1.36A, Power = 19W
- at 50% (force = 18 Newton) , 20V, 2A, P=40W
- at 25% (force= 30Newton) , 28V, 2.7A, P=75W
- at 10%, 44V (force= 50 Newton) , 4.3A, P= 190W
- Price (this is not a joke): 144US $ a piece at Qty=10 ...
Power Mosfet types used:
IRF540: for PWM control of softshift solenoids (PIC3). With large heatsinks.
(Specs: 27A/100V, Ron = 0.085 Ohm,k Ci=1.45nF, ton delay= 15ns, ton risetime
= 70ns, toff = 50ns)
IRL640: for tangent solenoid switches 120V/10A, logic level mosfet. (Ug=5V).
No cooling applied.
IRL640: for damper solenoids. No cooling.
BUZ345: for electromagnetic string drivers (41A types). With large heatsinks.
(Ug = 10V)
Ball bearings used in the bow guiding mechanism:
FAG 608.2Z (axis bore 8.0mm, outside diameter 22.0mm) (4 ball bearings used
inside copper cylinders). Always replace in pairs!
DIN connectors for MIDI I/O:
Adjustments to be made for the bow mechanism:
Whenever a string needs to be replaced, but obviously also whenever the bow
belt itself breaks and is replaced, the bow has to be adjusted. First thing
is always to adjust the bearings on the slide above the rosin wheel such that
when the softshift solenoids are inactive, there is no contact between bow and
string. Then the bow tension should be adjusted using the crick-screw underneeth
the mechanism.
Strings:
for range 31-79 (max.33-81)
- Low string: double bass A-string, tuned to G , Midi note 31. Remove all
textile from end with eyelet before mounting the string. A better sounding
alternative is using pianowire, diameter 1.2mm.
- High String: piano wire, diameter 0.5mm. Midi note 55. (risky)
for range 28-76:
- Low string: double bass E-string. Midi note 28. Remove all textile from
end with eyelet before mounting the string. Do not expect a good sounding
bass, since the soundboard is really too small for a good resonance.
- High String: piano wire, diameter 0.6mm. Midi note 52. (risky)
for range 36-84:
- Low string: piano wire string, diameter 1.4mm. Midi note 36. Make strong
eyelet at the end of the string.
- High string: piano wire string, diameter 0.35mm. Midi note 60. (nearly impossible,
unless special high strength piano wire is used)
for range 33-69, with octave overlap: (tested 02.07.2004)
- Low string: Steel pianowire, diameter 1.4mm, tuned to A-33 (110Hz)
- High String: piano wire, diameter 0.6mm, tuned to A, Midi note 45 (220Hz)
for range 33-74, with overlap: (tested 09.10.2004)
- Low string: Stainless steel pianowire, diameter 1.4mm, tuned to A-33
(110Hz)
- High String: piano wire, diameter 0.6mm, tuned to D, Midi note 50
for range 33-74, with overlap: (tested 22.02.2007)
- Low string: Spring steel pianowire, diameter 1.5mm, tuned to A-33
(110Hz) (can be tuned to 36 or 38 as well)
- High String: piano wire, diameter 0.6mm, tuned to D, Midi note 50
Experimenteel bepaalde breukgrenzen voor snaren op trillende lengte 122cm:
| Snaarmateriaal |
Diameter (in mm)
(meetfout:0.01mm)
|
optimale toonhoogte (midi) |
snaarspanning in Newton |
Toonhoogte vlak voor de snaarbreuk (midi) |
beoordeling |
| messing klavecimbelsnaar |
0.665 |
45-46 |
|
48 |
klinkt schitterend, maar is te fragiel |
| messing klavecimbelsnaar |
0.406 |
44 |
|
47 |
id. |
| staal pianosnaar |
0.70 |
|
480 N @ 50 |
50 |
inharmoniciteit |
| staal pianosnaar |
0.60 |
50 |
265 N @ 50
560N/mm2
|
53
|
goed
inharmoniciteit
|
| staal pianosnaar |
0.50 |
55 |
|
57 |
te dun |
| staal pianosnaar |
0.32 |
54 |
|
55 |
klinkt te stil |
| staal klavecimbelsnaar |
0.277 |
|
|
49 |
te stil, te fragiel |
| catgut |
1.30 |
50 |
|
|
klinkt erg hees en dof. Onvoldoende slijtvast. |
| double bass, A, wound on steel |
2.25 |
33 |
|
35 |
klinkt redelijk. Te zacht voor de tangenten. |
| double bass, E, wound on steel |
2.76 |
28 |
|
31 |
hiermee krijgen we geen grondtoon |
| staal inox pianosnaar |
1.40 |
33-36 |
218 N @ 33 - 141N/mm2 |
|
klinkt metaliek maar wel goed.
inharmoniciteit
|
| staal pianosnaar |
1.50 |
33-38 |
230N @ 33 142N/mm2 |
45 |
heeft iets beter basgeluid.
inharmoniciteit
|
Important note: in order to make use of the electromagnetic
string driver mechanism, the use of strings made of ferromagnetic material is
mandatory! So use pianowire for this application. (Not stainless steel wire,
unless it's a martensitic or ferritic type!).

{kind=link}
{kind=link}
{kind=link}