|
<Casta Uno> & <Casta Due >
|
|
robotic castanets by Godfried-Willem RAES 1996-2007. |
|
<Casta Uno> & <Casta Due >
|
|
robotic castanets by Godfried-Willem RAES 1996-2007. |
A first set of automated castanets was added to the <Vox
Humanola> organ robot module built between 1996 and 2005. This subset
was revised a few times as it appeared quite a bit more complicated to automate
castenet playing than a first estimation might reveal. In the first and most
primitive version pull-solenoids were used to activate the lower shell of the
castanets against the upper shells. The mechanism however was pretty unreliable,
in part because of unprecision in the woodwork of the holder, and because of
too many degrees of movement freedom (in particular, sideways) of the castanets
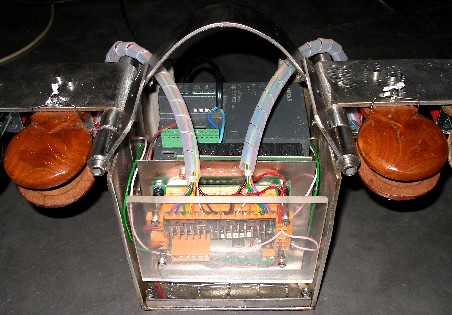
themselves. The picture below shows the front side of the first attempt (<Casta
0>).  This
version was abandonned in 2005. An improved version, using 15 castanets was
built later in 2005 and integrated also in <Vox Humanola>:
This
version was abandonned in 2005. An improved version, using 15 castanets was
built later in 2005 and integrated also in <Vox Humanola>:

Here the lower halves of the castanets are pushed against the upper halves by levers and felt covered pushers driven by solenoids. This mechanism works pretty well but suffers a bit from a lesser than possible dynamic range.
In 2007 we decided to make a second castenet robot, thus avoiding to have to take the Casta module in and out of <Vox Humanola> for smaller <M&M> orchestra concerts using it. At the same time the mechanism and its dynamic range was greatly improved.
The midi note mapping in music notation is: 

Complete Midi Implementation table for <Casta>:
Command meaning / effect remarks
(+= implemented)
NOTE OFF (128 +k) none
NOTE ON (144+k) Casta 1 module (in <Vox Humanola>
note range 113-127: velo implementedCasta 2 module:
note range 112-127, velo implementedLight mapped op note 111.
+ POLY AFTERTOUCH (160_k) Not implemented No CONTROLLERS: 176+k nr 123: All notes OFF (emergency note off) + PROGRAM CHANGE 192 + k Programs 122-127 select different velocity scaling applicable to the castanets. The lookup tables can be user programmed using sysex commands. Program 0 is the original default and not reprogrammable.
It is recommended to allways use program change 122, wich has an optimised mapping. Higher program changes contain test mappings.+ CHANNEL PRESSURE 208 + k Not implemented No PITCH BEND 224 + k Not implemented No SYSEX used for uploading lookups for 8 different programs (1-8) with velocity mappings for the castanets. (<Casta>) + 241 and higher Not implemented no real time msg's No Compositions for the Casta Robots:
- Godfried-Willem Raes
- "Vlam & Co" (Casta 1 & 2)
- "Grays 4 Casta" (Casta 2) (Premiered NYC 05.07.2007)
- "Afro Casta" (Casta 2)
- Sebastian Bradt "Cliquety Clack" (Casta 1)
- Steve Reich "Clapping Music" (adapted by Kristof Lauwers)
- Moniek Darge & Kristof Lauwers: 'For CQT device with vocal and violin input and Casta Due"
- Godfried-Willem Raes & Kristof Lauwers: 'Two Radar Vectors for Casta Due" (Premiered NYC 05.07.2007)
Technical data and instrument passport:
Casta Uno
Casta Due
- Sizes: width 1230mm, depht 155mm, height 160mm. For transportation the wings can be folded up.
- netto weight: 9.2kg
- electrical connection: 3-prong connector, 230V ac. (Switchable to 100-130V on the power supply)
- data connection: MIDI input, 3 MIDI THRU's
- Insurance value:(production cost, materials): 3500 Euro.
| Back to Logos-Projects page : projects.html | Back to Main Logos page:index.html | To Godfried-Willem Raes personal homepage... | To Instrument catalogue | Vox Humanola |  |
Op het eerste gezicht kan het automatizeren van zo'n ogenschijnlijk eenvoudig slaginstrumentje als de castagnet welhaast triviaal lijken. Zoals vaak is ook hier evenwel schijn erg bedrieglijk. Onze eerste pogingen om de klus te klaren dateren van 1996. Toen bouwden we een castagnet module bestaande uit acht castagnet paren aangedreven door trekmagneten. Ons eerste bouwsel zag eruit als in volgende schetsen en fotos:
 Het aldus opgebouwde
mechanisme werkte weliswaar maar was erg onbetrouwbaar naar klankresultaat.
De onderste schelpen werden aangedreven door de trekmagneet via een in de castagnetten
ingeboord en geschoefd stalen staafje. De bovenste helft was relatief vrij en
beweeglijk. Door deze nochtans voor de werking imperatieve beweeglijkheid, kon
de bovenste helft ook tamelijk vrijelijke zijdelings bewegen, wat precies de
oorzaak vormde van het vrij onvoorspelbare muzikaal dynamisch resultaat. De
module vormde sedert het begin van de automaat, een deel van <Vox Humanola>.
Omwille van de toch te grote onbetrouwbaarheid van het mechanisme, bouwden we
in 2005 een nieuwe versie. Deze keer opgebouwd uit 15 castagnetten. Ook hier
weer behielden we de essentiele bewegingsvrijheid maar veroorzaakten we de dichtklapbeweging
nu door het indirekt in beweging brengen van de onderste schaalhelften. Dit
middels van hefbomen en vilten polsters voorziene elektromagneten. In deze versie
zijn beide schaalhelften relatief vrij en beweeglijk, zij het in beperktere
mate dan in de eerste versie. Deze castagnet module, <Casta 1> gedoopt,
werd vast ingebouwd of opgehangen in <Vox Humanola> en kan indien gewenst
ook uit <Vox Humanola> worden losgemaakt en als afzonderlijke automaat
gebruikt en bestuurd. De <Casta 1> module werkt naar behoren, zij het
toch nog met een behoorlijke dosis onvoorspelbaarheid op dynamisch vlak maar
is in die zin wat onbevredigend omdat ze lang niet de potentieel mogelijke dynamiek
haalt die menselijke spelers uit het simpele instrumentje tevoorschijn weten
te toveren.
Het aldus opgebouwde
mechanisme werkte weliswaar maar was erg onbetrouwbaar naar klankresultaat.
De onderste schelpen werden aangedreven door de trekmagneet via een in de castagnetten
ingeboord en geschoefd stalen staafje. De bovenste helft was relatief vrij en
beweeglijk. Door deze nochtans voor de werking imperatieve beweeglijkheid, kon
de bovenste helft ook tamelijk vrijelijke zijdelings bewegen, wat precies de
oorzaak vormde van het vrij onvoorspelbare muzikaal dynamisch resultaat. De
module vormde sedert het begin van de automaat, een deel van <Vox Humanola>.
Omwille van de toch te grote onbetrouwbaarheid van het mechanisme, bouwden we
in 2005 een nieuwe versie. Deze keer opgebouwd uit 15 castagnetten. Ook hier
weer behielden we de essentiele bewegingsvrijheid maar veroorzaakten we de dichtklapbeweging
nu door het indirekt in beweging brengen van de onderste schaalhelften. Dit
middels van hefbomen en vilten polsters voorziene elektromagneten. In deze versie
zijn beide schaalhelften relatief vrij en beweeglijk, zij het in beperktere
mate dan in de eerste versie. Deze castagnet module, <Casta 1> gedoopt,
werd vast ingebouwd of opgehangen in <Vox Humanola> en kan indien gewenst
ook uit <Vox Humanola> worden losgemaakt en als afzonderlijke automaat
gebruikt en bestuurd. De <Casta 1> module werkt naar behoren, zij het
toch nog met een behoorlijke dosis onvoorspelbaarheid op dynamisch vlak maar
is in die zin wat onbevredigend omdat ze lang niet de potentieel mogelijke dynamiek
haalt die menselijke spelers uit het simpele instrumentje tevoorschijn weten
te toveren.
In 2007 namen we het onderwerp opnieuw ter hand. Enerzijds teneinde dit probleem op te lossen, maar anderzijds ook vanuit de binnen de M&M orkestpraktijk ontstane behoefte om <Casta> als afzonderlijk en verplaatsbaar instrument te kunnen gebruiken. Zo kwam dan ook een afzonderlijke <Casta 2> robot tot stand, eentje die naast de in Vox Humanola ingebouwde versie kan worden gebruikt.
Casta 1:
Een afzonderlijk processor board staat in voor de aansturing van de castagnetten. Hierbij kan volop gebruik gemaakt worden van aanslaggevoeligheid. De kastagnetten werden gerangschikt naar scherpte van klankkleur, zodat een genuanceerd spel mogelijk wordt. Ze werden gemapt op het midi nootbereik 113-127. Onnodig te zeggen dat de ritmische spelmogelijkheden die van een menselijke speler verre overtreffen... Door deze toevoeging, kreeg de Vox Humanola meteen een knipoog naar het draaiorgel en de orkestrion. Vandaar de naam die we voor de robot waarin de module is opgenomen van in den beginne bedachten: de Vox Humanola, het heeft iets van een Vox Humana en klinkt een beetje spaans...
De elektromagneten voor de castagnetten komen van de firma August Laukhuff. Voor de castagnetten werden in <Casta 1> Laukhuff pallet magneten 12V/150mA gebruikt. Wij sturen ze, voor uitsluitend puls bedrijf aan op een voedingsspanning van 24V. De maximale piekstroom die dan kan lopen, wanneer alle castagnetten op hetzelfde ogenblik zouden spelen, is 4.8A. Mits een bufferelko van 10mF wordt toegepast, kunnen we in de praktijk alle muzikale mogelijkheden voldoen met een voeding van 24V/50W.
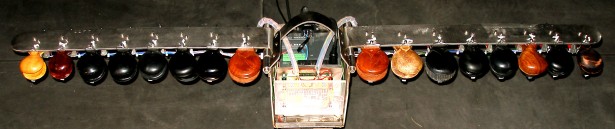
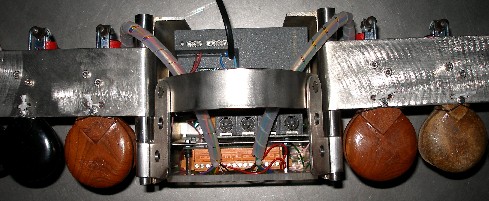
Casta 2:
Het elektronische schema voor Casta 2 is zowat identiek met dat voor Casta 1, al werden hier wat lichteffekten toegevoegd. Het aantal castagnetten voor Casta 2 is ook met een eenheid groter dan bij Casta 1: 16 paartjes, gemonteerd op twee 'vleugels' van acht. De Casta 2 module kan worden opgehangen. Om de dynamiek te vergroten werd de voedingsspanning van Casta 2 heel wat hoger gekozen (50V) dan voor Casta 1. De stroombegrenzing in de gebruikte Siemens Sitop voedingsmodule treedt in werking wanneer de gevraagde stroom te groot zou worden.

Midi noot-mapping:
Afmetingen:
Casta I:
Casta II:
Elektrische aansluiting:
Dagboek voor de Casta modules:



 Een aan uit schakelaar is niet voorzien op de robot vanwege de moeilijke bereikbaarheid
op zijn voorziene opgehangen positie. Een netstekker met ingebouwde schakelaar
moet voor dit doel worden voorzien.
Een aan uit schakelaar is niet voorzien op de robot vanwege de moeilijke bereikbaarheid
op zijn voorziene opgehangen positie. Een netstekker met ingebouwde schakelaar
moet voor dit doel worden voorzien.| (Terug) naar logos-projekten: projects.html | Terug naar Logos' index-pagina | Naar Godfried-Willem Raes personal homepage... | Naar katalogus instrumenten gebouwd door Godfried-Willem Raes | |
Last update: 2017-08-01 by Godfried-Willem Raes
Maintenance information:
Casta Due: