|
<Steely>
|
|
Godfried-Willem RAES 2021-2022 |
|
<Steely>
|
|
Godfried-Willem RAES 2021-2022 |
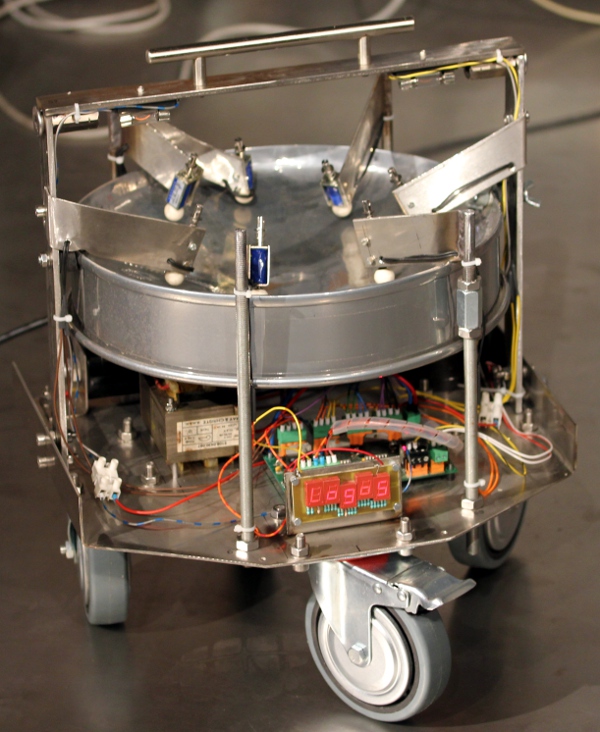
'Steely'
In our instrument collection at the Logos Foundation, we had a small steeldrum
since a very long time. It used to be a part of my setup as a percussionist
in the Logos group since the late sixties of last century. It's an eigth notes
pentatonic instrument tuned to A.  With
it's eight notes, it looked like a quite easy undertaking to get it automated.
With
it's eight notes, it looked like a quite easy undertaking to get it automated.
 However there are a few
pittfalls and specific problems to cope with. The very first experiments we
performed revealed that clamping the instrument rigidly to a structure is detrimental
to the sound and its resonance. The instrument as a whole must be left free
to resonate! Thus we had to design a way of suspending the steeldrum freely.
We used two suspension points and two soft neoprene shock absorbers with 6 mm
threads:
However there are a few
pittfalls and specific problems to cope with. The very first experiments we
performed revealed that clamping the instrument rigidly to a structure is detrimental
to the sound and its resonance. The instrument as a whole must be left free
to resonate! Thus we had to design a way of suspending the steeldrum freely.
We used two suspension points and two soft neoprene shock absorbers with 6 mm
threads: 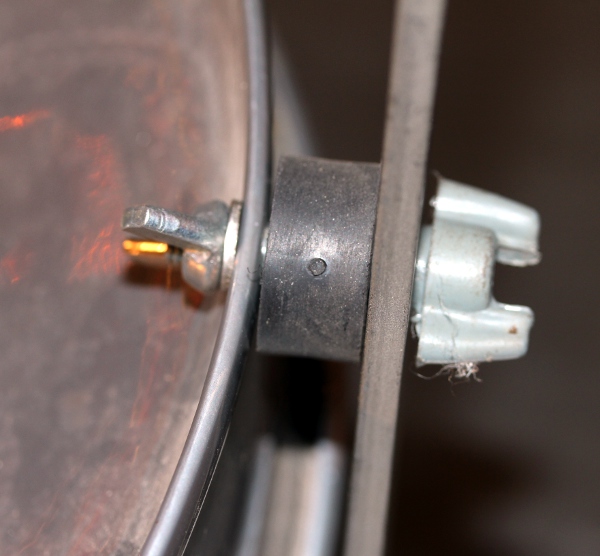
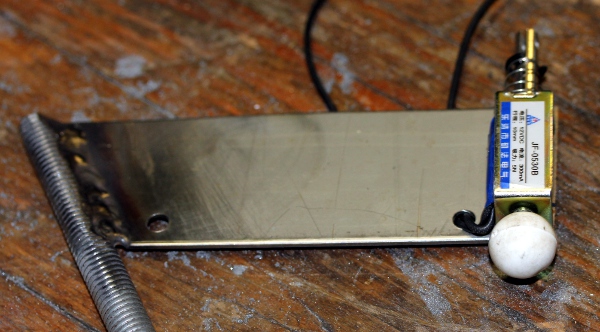
 For a good sound, it is fundamental to use the right material for the beaters:
soft rubber seems to work best here. We used small Chinese made solenoids (Banggood)
to drive the beaters and welded adjustable holders for mounting them:
For a good sound, it is fundamental to use the right material for the beaters:
soft rubber seems to work best here. We used small Chinese made solenoids (Banggood)
to drive the beaters and welded adjustable holders for mounting them:  .
.
As soon as I released the first details of this robot in the making on the internet, I got reactions from people with regard to the name 'Steely'. Dennis Bathory-Kitz suggested 'Dan ' as a better name for it. I had to lookup what he could have meant here as I had no clue... Wikipedia revealed Dan Steely must once have been an obscure although pretty well known pop group. That explains why I missed the reference, popmusic being completely absent from my personal musical backgrounds... But also, as I got to learn, it is the name of a giant dildo appearing in William S. Burroughs 'Naked Lunch'...
In the firmware for the PIC microcontroller steering this robot, we implemented not only the usual velocity sensitivity, but also automatic note repetitions using the key-pressure command. A pretty new feature in this robot is its inherent protection against note overloads that could challenge the duty cycle limits for the solenoids used. To achieve this, we implemented a death-time after each pulse. Note-on commands received during this time interval will be neglected by the robot. Note that the death time increases with increasing velocities.
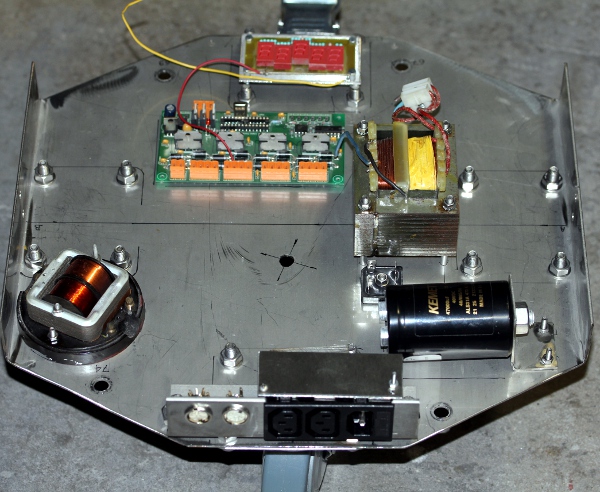
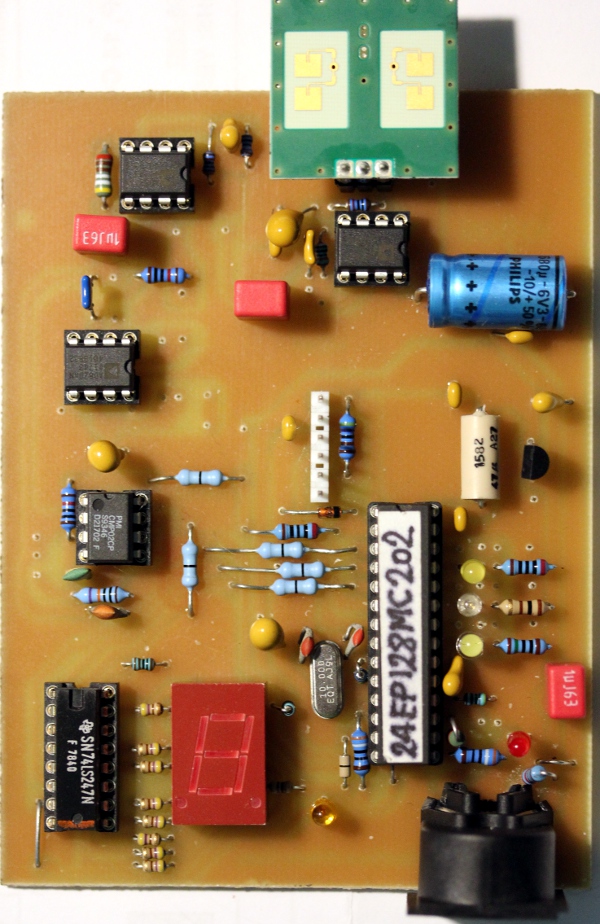
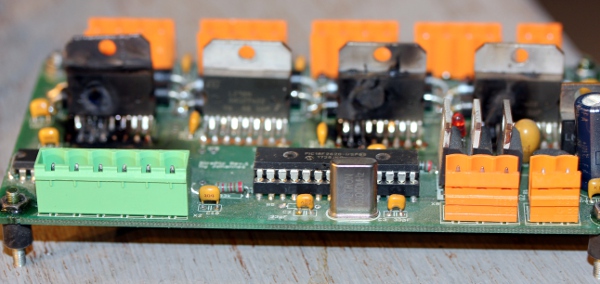
The circuit uses L298N standard bridge drivers, here merely used as switches. Due to this, the solenoids could be connected between ground and chip output.
Circuit Overview:
 There is no power-on
relay in this circuit as we use the enable inputs on the bridge chips as power
on/off switches.
There is no power-on
relay in this circuit as we use the enable inputs on the bridge chips as power
on/off switches.
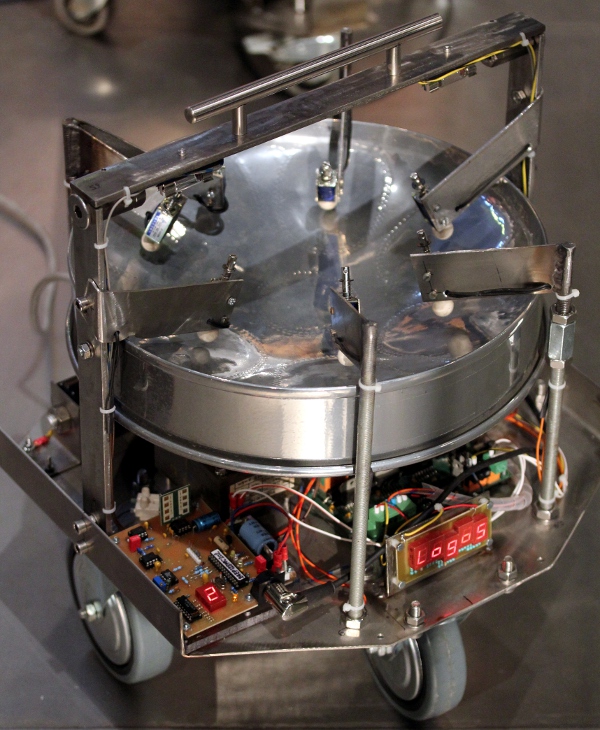
This little robot can be used fully stand-alone, as an interactive, gesture
controlled, sound sculpture. This was achieved by designing a radar based data
acquisition system for gesture recognition. This
system is described here. For stand-alone operation, a short patch cable
has to be connected between the radar sensor and the MIDI input of the robot.
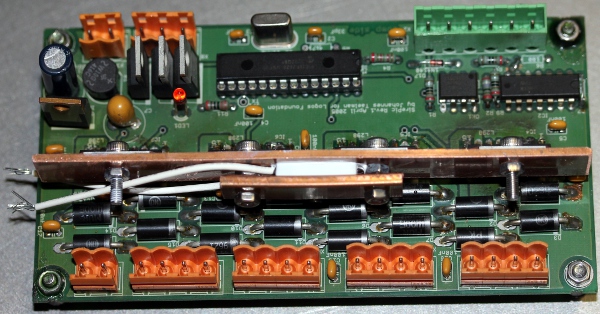
This connection has to be established before power-up of the robot. 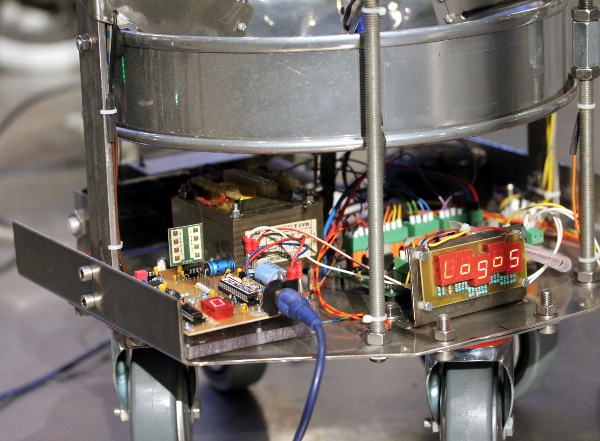 In 2025 we added a temperature sensor on the bridge driver chips. Whenever these
chips get too hot (>70 degrees Celsius) this temperature switch will turn
off the solenoid power. Power will be restaured automatically as soon as the
temperature of the chips cooled down to ca. 50 degrees Celsius.
In 2025 we added a temperature sensor on the bridge driver chips. Whenever these
chips get too hot (>70 degrees Celsius) this temperature switch will turn
off the solenoid power. Power will be restaured automatically as soon as the
temperature of the chips cooled down to ca. 50 degrees Celsius.
This is an overview over the circuitry: 
Midi implementation:
Lights:
Technical specifications:
Design and construction: dr.Godfried-Willem Raes (2021-2022)
Collaborators on the construction of this robot:
Music composed for this robotic instrument:
Godfried-Willem Raes 'Pentademon' for steely.(2022) [embedded 6 little pieces]
Godfried-Willem Raes 'Magische Vierkanten: #3' (2025)
Kristof Lauwers 'in the making' (2022)
| Back to Logos-Projects page : projects.html | Back to Main Logos page:index.html | To Godfried-Willem Raes personal homepage... | To Instrument catalogue |  |
<Steely>
De geschiedenis van de steel-drum is verweven met koloniaal imperialisme, slavenhandel en kristelijk religieuze repressie: het instrument ontstond immers uit de repressie van de uitbundige carnavalvieringen die in Trinidad sinds ca.1860 tot een groot volksfeest waren uitgegroeid en waarbij de kristelijke onderdrukkers de plaatselijke tamboo-bamboo bands verboden en de instrumenten in beslag namen. Die bands waren op zich al een substituut voor de oorspronkelijke tribale Afrikaanse trommen die tot de kultuur van de geimporteerde slaven behoorden en die vanaf 1884 streng verboden werden. Na verschillende aanvallen van westers imperialisme, bleef de bevolking achter met de lege olievaten van de westerlingen op hun stranden. Industrieel afval dus. Die olievaten werden gebruikt als grondstof voor de vervaardiging van de steel-drums in de Caraiben sedert 1930-1940. De steel drum is sedert zijn ontstaan de karnavalvieringen ontgroeid en leidde tot het ontstaan van redelijk grote ensembles, de steel-bands die ook vandaag nog bestaan en populair zijn. Enkele ervan zijn gevestigd in Nederland en in het Verenigd Koninkrijk, de koloniserende mogendheden van toen. De steel-drums die in die ensembles worden gebruikt omvatten een hele familie instrumenten, van sopraan tot tenor en bas. Hoewel chromatisch gestemde sopraan instrumenten wel voorkomen, zijn de bands evenwel duidelijk diatonisch (pentatonisch zelfs veeleer...) georienteerd. De bas instrumenten hebben dan ook vaak slechts twee of hooguit drie tonen.
Een kleine steeldrum maakte al sedert de vroege jaren zeventig
deel uit van mijn slagwerkinstrumentarium in de Logos groep. In de jaren '80
raakte mijn slagwerkinstrumentarium evenwel meer en meer aan de kant geschoven
ten bate van enerzijds de klarinet en anderzijds mijn eigen zelfontworpen elektronika.
Na zodoende ettelijke decennia opgeborgen te zijn geweest, prikkelde het instrumentje
opnieuw mijn aandacht in de door corona virussen geteisterde en daardoor van
publieke aktiviteiten gespeende eindejaarsperiode van 2021. We vatten het idee
op om er toch een automaatje van te maken. Op
het eerste gezicht leek dit een eerder rechttoe- rechtaan onderneming van beperkte
omvang te worden, maar vanzodra we de eerste proefopstellingen uitvoerden bleek
dat toch wat kort door de bocht. Eerst en vooral bleek het niet mogelijk de
steeldrum zelf in een rigiede gelaste struktuur vast te klemmen zonder daarbij
de hele resonantie van het instrument in het gedrang te brengen. Een vrije en
elastische ophanging bleek dus een absolute voorwaarde voor een goed resultaat.
Vandaar dus de ophanging van de steeldrum met twee M6 schokdempers in zacht
neopreen.
Maar ook het aanslaan van de acht gestemde vlakjes in de kuip van het instrument
was minder eenvoudig dan aanvankelijk gedacht. De kuipvorm van het instrument
dikteert een voor elk toonvlak andere aanslaghoek tegenover de basisplaat waardoor
plaatsing van de elektromagneten op een vlakke cirkelvormige drager geen goed
resultaat kon opleveren. Elke elektromagneet moest dan ook op een eigen onafhankelijk
afregelbare drager gemonteerd worden. Vandaar onze montage op M10 draadstangen
met aangelaste montageplaatjes voor de elektromagneten.
Het materiaal waarmee de toonvlakken aangeslagen moeten worden is van groot belang voor het verkrijgen van een goede klank. Te harde kloppertjes leiden tot een lelijk en metaliek geluid en heel wat experimenten waren nodig vooraleer we tot een aanvaardbaar resultaat konden komen. Wat het aanslaan zelf betreft stonden we voor de keuze om ofwel aan te slaan bovenaan, dus zoals een bespeler dat zou doen, ofwel. van onderuit. Die laatste mogelijkheid is technisch gesproken superieur omdat we dan de zwaartekracht kunnen gebruik om de kloppertjes te laten terugvallen. Daar staat echter tegenover dat zulke montage het speelmechanisme van het geautomatiseerde instrument geheel zou verbergen waardoor de verleidingskracht van het instrument zeer zeker zou worden verminderd. Dus toch maar geopteerd voor een zichtbare bovenop montage en de daardoor noodzakelijke toepassing van terugslagveren om de kloppertjes te laten terugkeren naar hun hangende rusttoestand.
Om de prijs zoveel mogelijk te drukken -we moeten immers al jaren
zien te overleven zonder enige subsidie- opteerden we voor het gebruik van goedkope
Chinese Banggood elektromagneetjes. Volgens het label op de spoeltjes zouden
het 12V exemplaren moeten zijn die een stroom trekken van 300 mA en daarbij
een kracht opleveren van 5 N bij een trajekt van 10 mm... 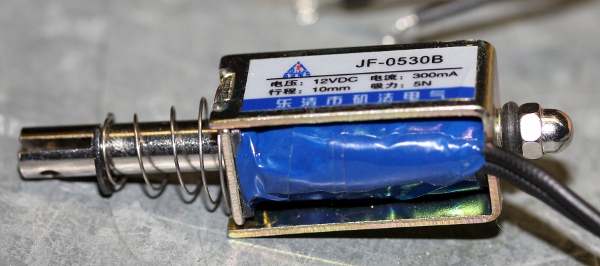 Daarvan bleek evenwel een en ander helemaal niet te kloppen. Bij 12 V trekken
ze een stroom van 1 A en bij een stroom van 300 mA staat er een spanning over
van 4.2 V. Hun koude DC weerstand is ca. 12.3 Ohm. Na wat experimenteren en
meten, besloten we ze te gebruiken met een spanning van 24 tot 33 V met een
duty cycle van minder dan 10% en pulsduren van hooguit enkele millisekonden.
Aangezien we nog enkele PIC-processor boards op voorraad hadden van het type
ontworpen en gebruikt voor onze <Sire>-robot en omdat deze acht spoelen
kunnen aansturen, leek dat een goede oplossing. Op dit board worden geen MOSFET's
gebruikt maar wel vier brug-drivers van het populaire type L298N. Dit is het
schema:
Daarvan bleek evenwel een en ander helemaal niet te kloppen. Bij 12 V trekken
ze een stroom van 1 A en bij een stroom van 300 mA staat er een spanning over
van 4.2 V. Hun koude DC weerstand is ca. 12.3 Ohm. Na wat experimenteren en
meten, besloten we ze te gebruiken met een spanning van 24 tot 33 V met een
duty cycle van minder dan 10% en pulsduren van hooguit enkele millisekonden.
Aangezien we nog enkele PIC-processor boards op voorraad hadden van het type
ontworpen en gebruikt voor onze <Sire>-robot en omdat deze acht spoelen
kunnen aansturen, leek dat een goede oplossing. Op dit board worden geen MOSFET's
gebruikt maar wel vier brug-drivers van het populaire type L298N. Dit is het
schema:
De enable ingangen op de brugdrivers gebruikten we als power-on switch, bestuurd met midi controller 66. De drie MOSFET's op de print worden hier gebruikt voor het besturen van de lampjes. Twee buisvormige 24V gloeidraadlampes werden onderaan de bovenste dwarsversterking met het handvat gemonteerd. Deze lampjes worden automatisch geschakeld in funktie van de aktieve kloppertjes, zolang controller 69 geset blijft. Een derde lichtbron werd op het onderchassis aangebracht en bestaat uit drie witte LED modules met een 12V werkspanning. Deze modules zijn in serie geschakeld en gemapt op midi noot 122.
Dit is het overzicht over het geheel van de schakelingen:
In 2025 brachten we een thermische beveiliging aan voor de brugdrivers, nadat ze de geest gaven op een tentoonstelling in Sint-Truiden met als gevolg het uitbranden van alle elektromagneten. Wanneer in de huidige versie de temperatuur op de koelvin van de brugdrivers de grens van 70 graden te boven gaat, wordt de stroomtoevoer naar de elektromagneten afgesneden. Die stroom wordt automatisch weer ingeschakeld wanneer de temperatuur voldoende is gezakt.
Building logbook / Bouwdagboek:
Omdat ons vaak wordt gevraagd hoeveel werk en tijd kruipt in, en nodig is voor, het bouwen van dergelijke muzikale robotten, houden we ook voor <Steely> een beknopt en geilllustreerd bouwdagboek bij:

 Meteen ook aan aansluitmodule gemaakt voor de netstroom aansluiting met zekering
en IEC konnektor evenals twee MIDI- konnektors met degelijke DIN chassisdelen.
(Preh).
Meteen ook aan aansluitmodule gemaakt voor de netstroom aansluiting met zekering
en IEC konnektor evenals twee MIDI- konnektors met degelijke DIN chassisdelen.
(Preh).
 Het PCB hiervoor moeten we in elk geval herzien, om het te doen passen op
het chassis van Steely.
Het PCB hiervoor moeten we in elk geval herzien, om het te doen passen op
het chassis van Steely.
 Enkele
onderdelen ontbreken nog hier... niet op voorraad en dus besteld bij Farnell.
Intussen maakten we ook een ontwerp dat de oude PIC-radars moet kunnen vervangen...
Enkele
onderdelen ontbreken nog hier... niet op voorraad en dus besteld bij Farnell.
Intussen maakten we ook een ontwerp dat de oude PIC-radars moet kunnen vervangen...
 Mogelijke oorzaken: sabotage,
een nieuw geinstalleerd alarmsysteem op 24Ghz, een ventilator voor de radar,
een boen/veeg/schuurmachine vlakbij <Steely>, een fatale crash van de
PIC microprocessor, opzettelijke storing middels GSM's in de buurt...
Mogelijke oorzaken: sabotage,
een nieuw geinstalleerd alarmsysteem op 24Ghz, een ventilator voor de radar,
een boen/veeg/schuurmachine vlakbij <Steely>, een fatale crash van de
PIC microprocessor, opzettelijke storing middels GSM's in de buurt...





 Deze zijn te vervangen
door hetzelfde type 12V, 12 Ohm. Opgelet, want gelijkaardige solenoiden gelabeld
als 12V met exact dezelfde vorm hebben we ook in stock, maar die hebben een
DC weerstand van slechts 6 Ohm en kunnen beslist niet worden gebruikt in Steely.
De pulsstroom zou 5.5A bedragen wat veel meer is dan wat de L298N's aankunnen.
Het originele type draagt het typenummer JF-0530B.
Deze zijn te vervangen
door hetzelfde type 12V, 12 Ohm. Opgelet, want gelijkaardige solenoiden gelabeld
als 12V met exact dezelfde vorm hebben we ook in stock, maar die hebben een
DC weerstand van slechts 6 Ohm en kunnen beslist niet worden gebruikt in Steely.
De pulsstroom zou 5.5A bedragen wat veel meer is dan wat de L298N's aankunnen.
Het originele type draagt het typenummer JF-0530B.  Die
sensors hadden we nog op voorraad want we gebruikten ze ook voor de beveiliging
van de registermagneten in onze <Cemba> robot die we bouwden voor Berlijn.
Hier is het datablad voor deze
temperatuurschakelaars. Hier een foto van de herstelde print met temperatuurbeveiliging:
Die
sensors hadden we nog op voorraad want we gebruikten ze ook voor de beveiliging
van de registermagneten in onze <Cemba> robot die we bouwden voor Berlijn.
Hier is het datablad voor deze
temperatuurschakelaars. Hier een foto van de herstelde print met temperatuurbeveiliging:
 We hebben de firmware nog
eens uitvoerig getest op de skoop. Het bereik van de velocities gaat van 3
ms tot 9.5 ms. Aangezien er steeds een dode tijd geimplementeerd is van tweemaal
de velocity, is de maximale repetitiesnelheid nu 17.5 Hz bij maximale velocity,
iets wat de kloppertjes heel zeker niet kunnen halen.
We hebben de firmware nog
eens uitvoerig getest op de skoop. Het bereik van de velocities gaat van 3
ms tot 9.5 ms. Aangezien er steeds een dode tijd geimplementeerd is van tweemaal
de velocity, is de maximale repetitiesnelheid nu 17.5 Hz bij maximale velocity,
iets wat de kloppertjes heel zeker niet kunnen halen.
To be done:
Last update: 2025-08-27 by Godfried-Willem Raes
Technical data sheet and maintenance instructions:
Radar circuit:
Overview:
For stand-alone operation, connect the DIN-plug from the radar sensor board to the midi-in connector on the backside of the robot. If <Steely> is used as an externally controlled robot, disconnect this plug and connect your MIDI source to the input connector. The radar board is active in all cases, but has no effect when disconnected from the midi-input. All wiring and wiring changes should be performed with the mains power off. Disconnect the IEC mains plug prior to wiring changes.
For programming the two microprocessors, a PICkit3 or PICkit4 programmer (Microchip) is required. The radar board has a programming connector, but the L298N board requires a chip-clip with a connector. Of course, replacing the chip on the board is also possible.