|
Quartertone
Percussion Robot
|
|
<Tubi>
or
<2B>
Godfried-Willem
RAES
2003 /
2005
|
<Tubi>
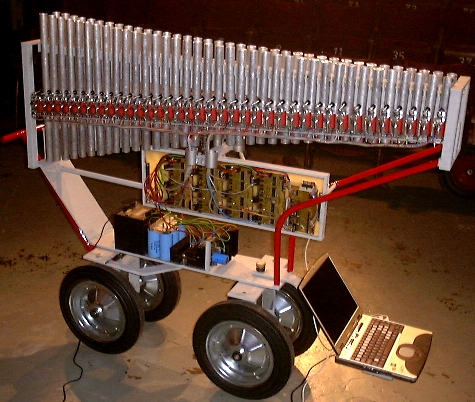
This musical robot consists of a assembly of 74 tuned thick aluminium tubes.
The compass is 3 octaves and the instrument is tuned in equal temperament quartertones
( 2^(1/24) intervals). The longest and lowest tube, sounding midi note 72 (or
525Hz) is 563mm long, the shortest, sounding midi note 108.5 (or 4328Hz) is
185mm long. Because of its extended range in the extreme trebble and its quartertone
tuning, this robot lends itself particularly well to music using spectral harmony
techniques as well as aural generation of differential tones.
The tubes have individual beaters driven by solenoids. Musical dynamics are
implemented by applying pulse width modulation techniques in the driver circuits.
The circuitry used is very similar to that developed for our <Vibi>
and one of our <Player Piano> automats.
The global layout of the PC board assembly and wiring became:

The power supply for the solenoids is 48V dc, 12.5A such that simultaneous
strokes on all tubes do not burn out the power supply. The 5V/4A supply for
the logic boards makes use of a Suisse made solid state switcher (Melcher, CSR2005-7,
dc-dc converter 38-90V in / 5V-4A out) , as shown in the straigthforward schematic
below:

A small extra board was added in 2005 to accomodate the power supply for the
video camera (12V/130mA). The power for the solenoids (and for the camera) comes
up only after reception of the appropriate pin code from the connected PC or
via midi if the PIC-board is installed. Using the PIC board, the user has to
send midi controller 66 with any non-zero value to switch on the high voltage
circuits. The circuit was changed in 2022 to overcome the high dissipation in
the display series resistors.The pincode decoding comparator is still very simple
and now uses following schematic:
The display being in series with the 40A relay, will be lit only after reception
of the correct pincode, this indicating the instrument to be ready for playing.
The instrument is mounted in a TIG-welded steel structure with four large and
sturdy wheels. It can also be taken from its base and used suspended from a
ceiling, thus saving stage space if needed. The assembled board, wired together,
can be seen on the pictures below:
This is the assembly holding the demultiplexer board (extreme right) and 4,
one-octave each, controll boards for the 'normally' tuned tubes.
This is the assembly holding the 3 timer boards for the quartertone tubes as
well as, to the right the display and the pin-code startup board. At the extreme
left one can see the ActiveWire USB interface board. This board can be exchanged
for a PIC controller board such that direct midi control becomes possible as
well.
Mapping:
Midi note range: 72-108 for the normal chromatic pitches and 24-60 for the
notes a quarter tone higher. (4 octaves down) Within our programming environment
for real time composition, <GMT>, fractional midi notes can be used: 72,
72.5, 73, 73.5 .... 108, 108.5. In 'musical' staff notation:
Note Off commands are not required. Velocity is implemented and has a wide
controll range. (0.25 microseconds to 32 ms pulse duration)
Midi controller 66 is used to switch the solenoid power on or off. When this
command for power on is received, the 'logos' display will light up.
The midi listen channel can be selected using the DIP-switches on the midi-input
board. The setting is only read after reset (midi controller 127 , the value
of the data byte does not matter) or on a cold boot of the microprocessor. The
default midi channel is 15.
Techical specifications:
- size: 1530mm width, 1300 mm heigth, 400mm depth (including wheelbase)
- weigth: ca. 80kg
- power: 240V ac / 640W peak, nominal 100W. Power connector: CEE monophase
16A, blue.
- tuning: in quartertones, based on A=442 Hz
- Ambitus: 3 octaves
- Maximum sound pressure level: >100dbA
- controll: MIDI input or PC USB port; Tubi can respond to midi commands either
through a midi port or via a network under UDP/IP protocol.
- Insurance value: 13.500 Euro.
Design and construction: dr.Godfried-Willem
Raes
Collaborators on the construction of this robot:
- Xavier Verhelst (tuning)
- Bert Vandekerkhove (mounting)
- Moniek Darge (painting)
- Kristof Lauwers (coding)
- Johannes Taelman (pic recoding 02.2005)
On may 8th 2003, this robot became an integral part of the <M&M>
robot orchestra. The midi input board with the PIC controller was added
in january 2005, so from now on <Tubi> does no longer require a laptop
computer for its control. The new midi input board and mutiplexer circuit became:

The 16 bit timers for the pulses driving the solenoids are scaled according
to the formula: pulse = 3582 + (velo * 64) + (velo^2 / 2), wherein velo is the
7-bit midi value (1-127) and pulse is expressed in microseconds.
Music composed for <Tubi>:
- Godfried-Willem Raes "GestroTubi", premiered on may 8th by Emilie
De Vlam and the author
- Sebastian Bradt "T-Birth", for tubi solo
- Kristof Lauwers & Moniek Darge, "RobotGarden" (in combination
with other robots)
- Godfried-Willem Raes "Technofaustus" (incombination with the entire
robot orchestra)
- Godfried-Willem Raes "Quadrada Vectorial"
(with other M&M robots)
Nederlands:
<Tubi>
Tubi, of <2b>,is een automatisch komputergestuurd buizenspel
gestemd in kwarttonen over een bereik van drie oktaven. Het bestaat uit 74 nauwkeurig
gestemde buizen uit aluminium. De buisdoorsnede werd gekozen op 30mm, buitendiameter
en wanddikte 2mm. Voor de berekening van de stemming werd een specifiek komputerprogramma
geschreven. De basisdiapason voor het instrument is 442Hz. De intervallen zijn
telkens 2^(1/24) groot.
De door elektromagneten aangedreven kloppers werden zorgvuldig individueel
gekalibreerd en hebben een massa varierend tussen 10% en 20% van de massa van
de buis waarvoor ze zijn bedoeld. De elektromagneten krijgen een pulsbreedte
gemoduleerd signaal toegevoerd. Hoe langer de bekrachtiginspuls duurt, hoe groter
de energie waarmee de buis wordt aangeslagen.Daardoor wordt het mogelijk het
instrument met dynamische schakeringen aan te sturen en te bespelen.
<Tubi> is voorzien van hetzij een eigen USB poort ofwel een rechtstreeks
midi-input board. Wanneer gebruikt met het USB interface, wordt <Tubi>
bestuurd via een eigen laptop komputer, bij voorkeur via diens USB poort (ook
de printerpoort kan worden gebruikt). Via deze komputer en het bijhorende <GMT>
programma, kan <Tubi> ook luisteren naar een eigen midi-kommando verzameling.
Rechtstreekse programmering op de PC via GMT is dan natuurlijk de favoriete
besturingswijze, maar ook via een eenvoudige Basic Stamp (BS2) kan <Tubi>
dan in volle glorie tot klinken worden gebracht. Tubi wordt in dit geval dus
aangesloten hetzij via de printerpoort van een PC komputer, hetzij via een USB
poort, maar ook UDP/TCIP besturing is dan geimplementeerd. In 2005 voorzagen
we <Tubi> daareenboven ook van een rechtstreekse midi-input, wat een specifieke
besturings laptop overbodig maakt. De belangrijkste reden was niet zozeer gelegen
in de bezuiniging op laptops, maar wel in het simpele feit dat Microsoft ons
het leven met de dag zuurder maakt: het zgn. plug and play opstarten van de
machines met diverse en steeds wisselende USB interfaces, als het al goed gaat,
duurt gewoonweg schabauwelijk lang. Ook de vele timing-glitches veroorzaakt
door de nieuwste Windows versies, maken moderne PC's meer en meer ongeschikt
voor ernstig en tijdkritisch besturingswerk. Onwaardig voor technologie van
de 21e eeuw. Dan maar beter terug naar moderne snelle Microchip PIC-mikrokontrollers...

Bouwdagboek:
Omdat ons vaak wordt gevraagd hoeveel werk en tijd kruipt in,
en nodig is voor, het bouwen van een muzikale robot, hebben we ook voor <Tubi>
een beknopt bouw- en onderhoudsdagboek bijgehouden:
- 01.01.2003: eerste ideen en konkrete tekeningen.
- 02.01.2003: Ontwikkeling software voor de berekening van de stemming en
dimensionering van de aluminium buizen. Power Basic CC compiler.
- 03.01.2003: Aanmaak set proefbuizen ter bepaling van de materiaalkonstanten.
- februari 2003: principe layout besturingselektronika.
- 5-12.03.2003: zagen en stemmen 1e kromatische reeks van 3 oktaven. Diapason
442Hz.
- 21.03.2003: ontwerp pc-board voor de timers [sch_8254_pulseonly,bmp en pcb_8254_pulseonly.bmp]
- 9-14.04.2003: uitzagen konstruktiedelen in staal.
- 17.04.2003: tig laswerk ophangframe buizen
- 18.04.2003: tig laswerk bovenchassis. Ontwerp layout pc boards.
- 19.04.2003: onderstel ineengelast.
- 20.04.2003: onderstel en bovenstel gemonteerd en aaneengelast.
- 21.04.2003: Voedingstransfo op bodemplaat gemonteerd met verzonken bouten.
Montage 6 elkos. Laswerk frame voor PC boards. Montageplaat in glasvezel epoxy
uitgezaagd. Assemblage voedingsgedeelte op chasssis. Montage 5V power supply
op koelvin. De definitieve afmetingen liggen nu vast.
- 22.04.2003: bedrading en test power supply: 48V/ 10A and 5V/4A. Montagebeugeltjes
gelast voor voeding. Klankbuis bovenste C toegevoegd.
- 23.04.2003: 5 timer PC boards volledig bestukt en gesoldeerd. Montageplaat
gefreesd en geboord.
- 24.04.2003: alle PC boards afgewerkt, inklusief 3 reserve exemplaren.Eerste
elektrische proeven. Alle printen zijn losneembaar zonder solderen. Bus-flatkabels
gemonteerd.
- 25.04.2003: demultiplexer print afgewerkt. USB print en Activewire print
gemonteerd.
- 26.04.2003: USB support toegevoegd in g_nih.dll
- 27.04.2003: strobe-line bedrading kant 1 PC board assembly afgewerkt.
- 28.04.2003: pincode komparator board bestukt. Zagen en stemmen kwarttoonsreeks
buizen (diapason 455Hz). Logos display gesoldeerd. Wordt in serie geschakeld
met het 24V/40A relais.
- 29.04.2003: berekeningsprogramma voor de toonhoogtes aangepast en nagerekend.
Bedrading voedingslijnen tussen PC-boards afgewerkt. Kurves voor 2e nodaal
punt (voor terugslagrem) en centrale aanslaglijn bepaald.Strobe-line bedrading
kant 2 PC board assembly afgewerkt.
- 30.04.2003: draagrail elektromagneten rij 1 gefreesd en ingelast. M20 bouten
(inox) onderstel gemonteerd met veren.
- 01.05.2003: Elektronika-paneel vastgelast in Tubi staalstruktuur. Voeding
aangesloten aan elektronikapaneel. Montage eerste rij van 37 elektromagneten
op rail. Omega ringen op twee wielen gemonteerd. Montage kloppertjes eerste
rij op M4 schoefdraad in Inox. Uitboren ophangpunten klankbuizen rij 2. Voorlopige
montage kwarttoonsrij.
- 02.05.2003: Vastzetten 2 overige wielen met omega ringen. Konstruktie draagrail
elektromagneten rij 2. Montage elektromagneten rij 2 en montage kloppertjes.
Uitzagen en buigen terugslagprofiel. Duwveren gemonteerd onder elektromagneetdragers.
- 03.05.2003: Lassen opduwveren en kableringgeleiders. Bedrading elektromagneten,
'normale' kant.
- 04.05.2003: Eindbedrading elektromagneten, kwarttoonskant, afgewerkt. Debugging
hardware. Bedradingsfoutjes hersteld. Software implementatie in g_nih.dll
getest. Vandaag heeft <Tubi> zijn eerste kwarttoonstoonladder gespeeld.
- 05.05.2003: Spirawrap rond kablering afgewerkt. Kruisdissel gelast en gemonteerd.
Testkode toegevoegd in GMT voor tests op dynamiek en op repetitiesnelheid
van de hamertjes.
- 06.05.2003: Stuurstang gelast en gemonteerd. Zinkfosfaat verf aangebracht.
Definitieve plaatsing van alle klankbuizen met tussendempertjes in geel geschuimd
elastomeer. Montage terugslagprofiel met viltstrip op nodale punten onderaan.
Test: midi-listening funktie werkt. Tubi speelt het eerste kwarttoonsstuk
van Sebastian Bradt! Ook GestroTubi werkt naar behoren.
- 07.05.2003: Inkleuring robot. Laptophouder gelast en gemonteerd. Mechanische
afregeling dynamisch bereik.
- 08.05.2003: Premiere van <Tubi> in de Logos Tetraeder, met werk van
Godfried-Willem Raes, Sebastian Bradt, Moniek Darge en Kristof Lauwers.
- 09.05.2003: korrektie nodale viltdempers: verbreding dempers in de kromatische
rij.
- 30.05.2003: vastkleven terugslagvilten
- 14.01.2004: wijziging besturingskomputer: nu <Irma> (Acer type laptop).
- 15.04.2004: reparatie 24V relais en display. Relais was doorgebrand.
- 16.04.2004: Display serieweerstanden gewijzigd: nu 22x 2k2 i.p.v. 1k5. Zenerdiodes
toegevoegd. Relais DC weerstand is 356 Ohm. Parallel over display 330 Ohm
geschakeld zodat de voedingsspannning op het pinkode board netjes 2 x 24V
is. Display + relais trekken ongeveer 300mA stroom nu.
- 27.07.2004: nieuwe driver geschreven in g_nih.dll / g_noh.dll
- 15.08.2004: besturingskomputer is nu <Hu>.
- 20.12.2004: PIC board gesoldeerd voor direkte midi aansturing van de centronics
bus.
- 22.01.2005: omzetting USB aansturing naar rechtstreekse midi sturing middels
PIC controller. Redaktie mikrokode voor de PIC. Doorgestuurd voor assembler
coding naar Johannes Taelman. Een wijziging in de midi-mapping dringt zich
op: de kwarttonen moeten nog een oktaaf lager worden gemapt, dus voortaan
4 oktaven naar beneden.
- 23.01.2005: midi channel is nu instelbaar gemaakt met een 4-bit DIP switch
op het input board.
- 24.01.2005: midi input board definitief gemonteerd. Wanneer we nu terug
willen naar USB, vergt dit zo'n uurtje werk... Het blijft echter best mogelijk.
- 27.01.2005: Johannes Taelman: eerste try out met PIC. Buggy...
- 28.01.2005: Tubi working again. Volledige dag kode debugging.
- 29.01.2005: ... start up problems. Luistert niet meer naar de midi bevelen...
- 30.01.2005: problems solved: optocoupler worked only marginally. Some CNY17-4
's do work, others just dont... Hoger vermogen weerstanden gemonteerd (3x1k)
op display board. Zenerdiode vervangen. Mikrokode voorbereiding voor 16 bit
timer besturing (in stapje van 100 microsekonden).
- 02.02.2005: Optocoupler now CNY17-4. Velo mapping op PIC nivo geimplementeerd
volgens de formule: pulse = 3582 + (velo * 64) + (velo^2 / 2). De pulsduur
in uitgedrukt in microsekonden. Tubi is weer helemaal operationeel nu.
- 01.03.2005: Video kamera gemonteerd met zicht op achterste rij kloppertjes.
Voeding gebouwd voor de nodige 12V/ 130mA stroomvoorziening van de kamera.
Dokumentatie power supply updated.
- 29.06.2005: Optocoupler op de midi ingang vervangen door een 6N137 type
dat veel sneller werkt dan de CNY27-4, die het liet afweten, zelfs met verkleinde
ingangsweerstand.
- 25.04.2006: Sommige hamertjes opnieuw afgeregeld.
- 16.02.2007: afregeling kloppertjes.
- 12.04.2007: Klopperjes opnieuw afgeregeld en vastgezet met Loctite 638.
- 17.07.2007: Herstelling vijf elektromagneten die beschadigd waren geraakt
in het transport naar de spiegeltent op 14.07.2007
- 30.08.2008: Korrektie van enkele verbogen elektromagneten.
- 31.08.2008: Upgrade van de GMT testkode voor Tubi.
- 10.04.2013: Intermitterende gliches bij het inschakelen veroorzaken soms
plakmagneten, wat gevaarlijk is omdat ze dan kunnen doorbranden. We overwegen
<Tubi> helemaal te herzien en gebruik te maken van 3 28-output pulse-only
boards voorzien van 18F4620 microcontrollers. Meteen kunnen we dan ook lichtjes
toevoegen...
- 19.10.2015: <Tubi> checked and found o.k.
- 10.06.2019: Robot checked and found o.k.
- 16.06.2019: Start van het bouwprojekt rond <Tubo>, een geheel nieuwe
versie naar onderen uitgebreid met twee oktaven, weliswaar kromatisch. Hier
is een link naar<Tubo>.
- 06.08.2020: Webcast rond <Tubo> via Facebook, in corona tijden.
- 18.02.2022: Nazicht 'logos'-display: vele weerstandjes blijken doorgebrand
te zijn. Nieuwe schakeling ontworpen en gebouwd:
Hier is het printontwerp, getekend in 2001:
- 19.02.2022: Nieuw display board gemonteerd op de frontzijde. Het display
licht op na ontvangst van een ctrl.66 power-on kommando.
- 14.09.2023: <Tubi> gaat mee naar de Deutsche Oper in Berlijn voor
de Zeroth Law produktie van Gamut Inc.
- 02.10.2023: <Tubi> keerde heelhuids terug uit Berlijn en nam zijn
vaste plek in het robotorkest weer in.
- te doen:
- optioneel: globaal dempingsmechanisme toevoegen.
- optioneel: toevoeging lampjes en effekten gemapt op de tien nog vrije noten.
Afmetingen & andere technische specifikaties:
- hoogte: 1300 mm
- breedte: 1530 mm
- diepte: 400 mm (inklusief wielen)
- gewicht: 80 kg
- maximale geluidsdruk: te bepalen (> 100dbA)
- elektrische aansluiting: 230V ac - 640Watt (peak), nominal 100Watt.
- plaatsing: Tubi moet zuiver horizontaal staan voor een goede werking van
de hamertjes.
- stemming: kwarttoons vertrekkend van een diapason van La = 442Hz
- data-poort: MIDI port. Optional: USB port, NiDAQ DIO device port or Centronics
type 8-bit parallel port. Only supported on the Wintel platform. Gebruik in
kombinatie met Macintosh komputers of andere microgolfovens is niet toegelaten.
- default midi channel: 15 (can be changed on the input board with the DIP-switches).
- pulse mapping formule: pulse = 3582 + (velo * 64) + (velo^2 / 2) (pulse
in microseconds, velo = 1-127, t bit midi value)
- Verzekeringswaarde (produktiekost): 13.500 Euro.
Design en konstruktie: dr.Godfried-Willem
Raes
Atelier medewerkers:
- Bert Vandekerkhove (montage)
- Xavier Verhelst (stemming)
- Moniek Darge (inkleuring)
- Johannes Taelman (PIC code revisie 02.02.2005)
Last update: 2023-10-11
by Godfried-Willem Raes
