|
<Trump>
an automated organ trumpet register with exponential
horn
Godfried-Willem
RAES
1999-2005
|
<Trump>
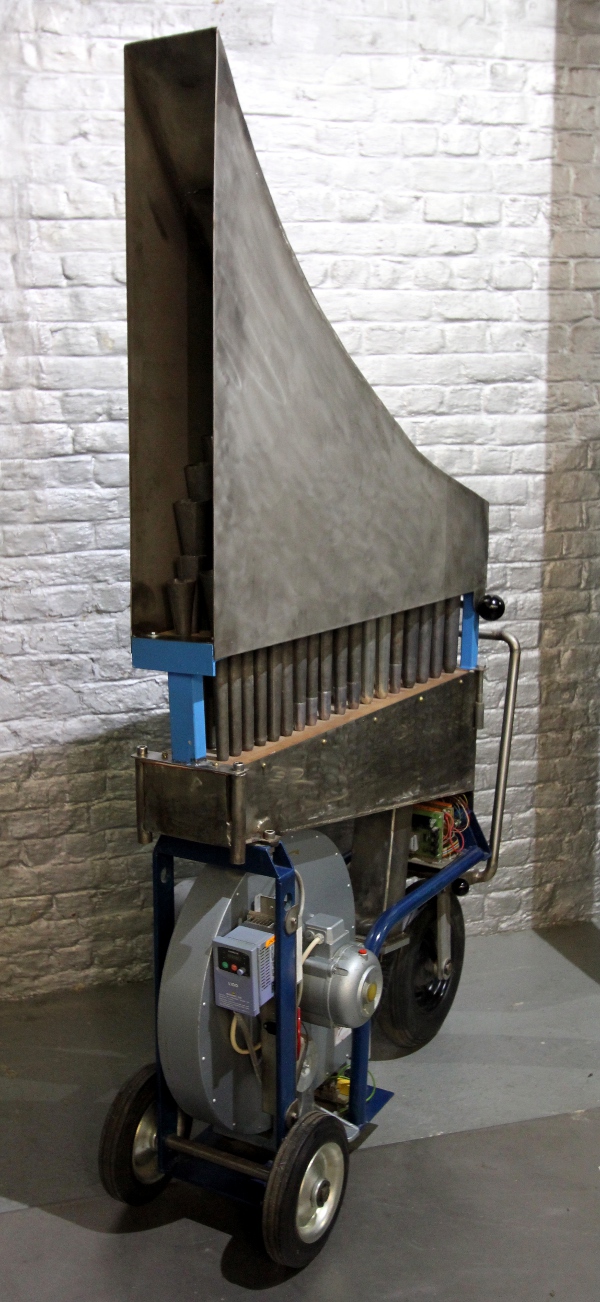
The design of this musical robot started with an old trumpet register taken
from an early 19th century organ. Nearly all resonators, made of the infamous
as well as anachronistic pipe metal (lead / tin) where smashed, rendering plans
for restoration idle. The only parts we kept were the reeds and the shalots.
The pipes give out in a large exponential horn constructed from stainless steel,
and common for all pipes. The concept of this automaton is more or less the
exact opposite of what instrument builders in previous centuries always attempted
at: homogeneity of timbre over the entire compass of the instrument. Here we
on purpose gave each pitch a timbre of its own. Therefore we calculated as series
of small conical horns, such that the lowest sounding notes get the smallest
cone, going slowly up in size to middle C and from there on down again up to
midi note 68 (A). In the higher part of the register, it sounds very much trumpet
like, whereas sharpness of tone color increases with decreasing pitch. The exponential
horn homogenizes the sound to a certain extend but, more important, guaranteed
a loud and very well projected sound. The notes are switched in the windchest
with electrical pallets, solenoid driven. Wind pressure control is possible,
although as can be expected from single reedpipes, does not preserve tuning!
Maximum wind pressure is 300 mm watercolumn and generated by a Laukhuff Ventus-type
organ blower driven by a programmable Hitachi motor controller. The pictures
below are taken during the construction phases.






The entire circuitry for this robot makes use of a single fast
PIC controller: a Microchip PIC18F252 - I/SP type. This controller takes care
of the midi input parsing, the note on/offs for the latches, Mosfets and solenoids
as well as of the PWM for the 3-phase motor controller, via an optoR (LED/LDR
combination) coupler. The circuit looks like:
The circuit is assembled on a single eurocard and includes the 5V dc power
supply (500mA) for this board as well as for the note latch boards.. The component
specified as OptoR in the schematic is an encapsulated combination of a LDR
and a small bulb or LED. For the housing we used the case of a very ancient
27MHz crystal, since this could be made completely lighttight and yet be opened
again for possible replacement of the bulb or bright white LED. The use of an
LDR here gives us signal integration for free, since these components are inherently
very slow reacting devices. The construction further guarantees us complete
galvanic separation between PIC board and associated electronics and the 3-phase
motor controller. The use of a microcontroller obviously greatly simplifies
the schematic and the circuitry required. The ingenuity is now required on the
level of the software design for the PIC controller. We confined this task to
our collaborator Johannes Taelman.
The power supply, although designed to cope with peak currents of over 7 A
at 15V, was very straightforward, using a linear regulator mounted on a large
heatsink.
Mapping:
Midi note range: 32- 68. (G#-g'#)
Note Off commands are required. Volume control (wind pressure) is implemented
and has a wide control range. The tuning of the instrument is only guaranteed
for volume controller set to the value 100 (corresponding to motor AC frequency
33Hz).
Trump responds to the midi all-notes-off command.
Controller 7 is implemented for wind pressure control. The value for this controller
should always be 100.
Technical specifications:
- size: width 400mm,length 1100mm, height 1950mm (the horn can be taken off
for transportation, thus reducing practical height to 1200mm)
- weight: ca. 160kg
- power: 240V ac / 300W peak, nominal 80W.
- Tuning: based on A=440 Hz
- Ambitus: midi 32 to 68
- Insurance value: 17.000 Euro.
Design and construction: dr.Godfried-Willem
Raes (1999-2004)
Collaborators on the construction of this robot:
- Marc Maes (2004)
- Leonaar Degraeve (2002)
- Bert Vandekerkhove (2003-2004)
- Xavier Verhelst (2003)
- Kurd Vandevelde (1999-2001)
- Johannes Taelman (2004-2005)
- Moniek Darge (2004)
- Kristof Lauwers (2004)
- Ghislain Potvlieghe (2005)
Music composed for <Trump>:
- Godfried-Willem Raes "GeroTrump", for Trump and a nude player
playing our invisible instrument
- Bastiaan Braadt "Buxus" for Trump.
[MP3 download]
- Anonymous (14th C) "The Goerlitz Lions Roar"


Nederlands:
<Trump>
Voor de bouw van deze automaat maakten we gebruik van de restanten
van een tot een puinhoop herleid trompet register van een vroeg negentiende
eeuws orgel. De paviljoenen waren werkelijk tot een schroothoop herleidt waardoor
aan restauratie niet te denken viel. Alleen de tongen en de pijpvoeten bleven
in dit ontwerp bewaard en zelf alle stemkrukken werden vervangen. In plaats
van individuele resonatoren voorzagen we deze automaat van een voor alle pijpen
gemeenschappelijke resonator gevormd als exponentiele hoorn. Deze hoorn lasten
we uit inox. De pijpen voor de laagste tonen monden uit in het kleinste deel
van de hoorn, terwijl de hoogste helemaal voorin uitmonden. Het ontwerp van
dit instrument staat zowat diametraal tegenover een minstens twee eeuwen oude
traditie -zoniet een obsessie- in de instrumentenbouw, waarbij bouwers ernaar
streefden om een zo toonhoogte onafhankelijk mogelijke klankkleur te verkrijgen
voor elk instrument of register dat ze ontwierpen. Hier wilden we precies het
omgekeerde: voor elke toonhoogte een zo eigen mogelijke formant maar dan wel
volgens een bepaald en voorspelbaar systeem. Daartoe voorzagen we de laagste
pijpen van heel kleine konussen (zoals in een regaal) die in lengte traag oplopen
naarmate de toonhoogte stijgt. Dit loopt vanaf midi noot 32 tot en met 60. Van
daaraf gaat het dan weer in omgekeerde richting en verkorten de konussen volgens
een omgekeerd exponentiele kurve. Hierdoor klinken de hoogste pijpen uitdrukkelijk
trompetachtig, terwijl de lage alsmaar snerpender en nazaler gaan klinken. Het
oor wordt hierdoor systematisch op een verkeerd spoor gezet bij de inschatting
van de oktaafligging van de voortgebrachte tonen. De hoorn homogeniseert de
klank wat, maar staat vooral in voor een luide en uitstekende projektie van
de toon. De klankkleurverschillen tussen de pijpen onderling hebben voor gevolg
dat een auditieve illuzie makkelijk kan worden geschapen: bij een stijgende
toonladder, klinkt er tegelijkertijd een dalende ladder in de formantstruktuur.
Voor het stemmen en intoneren van de tongwerken moet de exponentiele hoorn (bij
voorkeur met een takel, vanwege het grote gewicht) worden afgenomen. Hij is
daartoe op een draaiende as gemonteerd aan de achterzijde. De windlade is, afgezien
van het bovenblad waarop de pijpen rusten en waarvoor tropisch hardhout werd
gebruikt, eveneens geheel vervaardigd uit gelast inox. De elektromagnetische
ventielen waarmee de luchttoevoer naar de pijpen wordt geschakeld zijn binnenin
de windlade geplaatst. Voor de windvoorziening maakten we gebruik van een Ventus
orgelblazer van de firma Laukhuff, met een regelbare winddruk van maximaal 300mm
waterkolom. De aansturing van de motor gebeurt met een Hitachi motorcontroller.
Zoals voorspelbaar en normaal bij tongwerken, is ook hier de stemming afhankelijk
van de winddruk. Alleen bij een motor AC frekwentie van 32Hz is de stemming
korrekt. Controller
7 moet dan ook steeds met de waarde 100 worden uitgestuurd.
Bouwdagboek:
Omdat ons vaak wordt gevraagd hoeveel werk en tijd kruipt in,
en nodig is voor, het bouwen van een muzikale robot, hebben we ook voor <Trump>
een beknopt bouwdagboek bijgehouden:
- 15.02.1999: eerste ideen en konkrete tekeningen. Pijphouder uitgeboord.
- 10.03.2000: eerste reiniging pijpvoeten: verwijdering loodoxyden.(Giftig!)
- 30.12.2000: tests 3-fazen frekwentiegenerator voor motor sturing Laukhuff
- 20.02.2001: inventarisatie beschikbare pijpen in trompetregister.
- 08.2003: pijp restoratie tongwerken
- 09.2003: konstruktie bovenblad windlade met elektromagneten
- 18.12.2003: Snijwerk inox windlade met plasmabrander.
- 19.12.2003: snijwerk inox exponentiele hoorn
- 20.12.2003: TIG laswerk inox hoorn
- 21.12.2003: slijpen en polieren inox hoorn
- 22.12.2003: start ontwerp en bouw onderstel op drie wielen.
- 23.12.2003: konstruktie lager voorwiel en buiging verbindingsbuizen met
achterste dubbelwiel. Alle assen in 25mm gehard staal. Voorwiel 380mm diameter,
achterwielen 250mm diameter.
- 24.12.2003: montage voorwiel en vork met kranslager.
- 25.12.2003: draaien assen op draaibank
- 26.12.2003: montage onderstel. Draagsstruktuur afgelast.
- 27.12.2003: ontwerp opbouw dragers windlade
- 28.12.2003: eerste montage en assemblage hoorn op windlade. Stabiliteitstesten.
- 29.12.2003: konstruktie M12 bouten ingelast in inox buis 25mm voor bevestiging
hoorn en pijpenrek voorzijde. Begin inkleuring in koningsblauw.
- 30.12.2003: Inox laswerk inblaaspijp en flens voor verbinding windlade met
kompressor. Windlade dichtgelast.
- 31.12.2003: Begin uitfrezen pijpgaten in pijphouder.
- 01.01.2004: Test winddichtheid windlade.
- 02.01.2004: Eerste voorlopige assemblage. Solderen en bedraden kleppen in
de windlade.
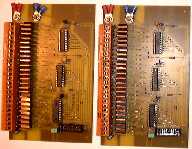
- 05.01.2004: Start bestukking driver PC boards: Weidmueller konnektors, draadbruggen,
IC's en BS170 Mosfets. We voorzien 48 individueel schakelbare devices (6 latches
van 8 bits breed).
- 06.01.2004: Afwerking note driver boards met bestukking alle IRL640 Mosfets
en DIL konnektors. Ontwerp schakeling voor PIC controller board.
- 07.01.2004: design PIC controller board. We voorzien 1 midi input en 2 midi
THRU konnektors. Print geassembleerd op gaatjesboard, gezien slechts 1 exemplaar
nodig.
- 08.01.2004: verder ontwerp en soldeerwerk aan het PIC board. Ook de 5V voeding
kan hierop plaats vinden. OptoR gemonteerd in oude 27MHz kristal behuizing
(anno 1940!). Elektrische tests op board o.k.
- 09.01.2004: Chassis gelast voor microcontroller en mosfet driver boards.
- 10.01.2004: Montage besturingselektronika in chassis. Ontwerp voeding 15V/
7A.
- 11.01.2004: Bouw PC board voor 15V / 7A voeding.
- 12.01.2004: Ontwerp bessturingsprotocol voor de PIC,
- 13.01.2004: Ombouw Lust 3-fazen controller voor motorbesturing. Start kode
PIC door Johannes. Plasmasnijwerk draagchassis voor Lust-controller en voedingskomponenten.
- 14.01.2004: Laswerk Inox draagchassis vermogenselektronika.
- 22.01.2004: Experimenten met kunststof rieten in de pijpen.
- 23.01.2004: levering toroidale transfo voor 16V voeding.
- 25.01.2004: 3-prong chassisdeel voor netstroomaansluiting gesneden in inox
chassis.
- 29.01.2004: draaibank werk: afwerking voorassen: sleuven voor omega ringen.
- 12.02.2004: kogelkoppen gemonteerd voor bevestiging hoorn hoven pijpwerk.
- 23.02.2004: eerste versie firmware voor PIC controllers afgewerkt.
- 24.02.2004: bedrading voedingen en netspanningssgedeelte. Bevestiging 3-faze
kontroller, netingang en ringkerntransfo op chassis. Montage 16V voeding op
bodemplaat.
- 25.02.2004: problemen met de 3-faze konvertor (Lust gmbh): wil niet meer
opstarten... Bedrading voeding naar PIC board en note drivers.
- 18.04.2004: nieuwe 3-faze controller ontworpen.
- 23.04.2004: Windlade opnieuw geopend voor test reaktiesnelheid klepjes.
- 24.04.2004: konnektor en interne bedrading windlade aangebracht. Enkele
kleppen vervangen, wegens niet perfekt sluitend. Kabelbundel met zuurvrij
siliconerubber afgekit. Bugs ontdekt in de PIC kode. Meetgegevens voor OptoR
(cfr. schema) verworven:
-
| Midi input to PWM (controller 7,
volume) |
Measured resistance of LDR in OptoR |
| 0 |
40M Ohm (after 10 seconds) |
| 1 |
6k6 |
| 2 |
4k1 |
| 4 |
2k4 |
| 8 |
1k3 |
|
16
|
720 Ohm |
| 32 |
391 Ohm |
| 64 |
217 Ohm |
| 127 |
125 Ohm |
- 25.04.2004: Test luchtdichtheid van de windlade.
- 28.04.2004: Hitachi motor controller besteld. Trump PIC board modified:
RC6 cannot be used as a bit output of RC7 is configured as UART input. So,
we connected A3 to PIC pin 2 (RA0). Circuit drawing updated.
- 29.04.2004: Bugs in PIC code killed. PIC now works as it should. Windchest
closed again.
- 30.04.2004: first attempts to tune the pipes...
- 01.05.2004: pipe works. Midi all notes off code checked.
- 02.05.2004: further pipe work on trump
- 06.05.2004: Hitachi motor controller mounted.
- 08.05.2004: programming of motor controller. Fast decelleration has problems:
motor becomes generative and Hitachi controller gives out error condition.
- 09.05.2004: motor controller reprogrammed. Now does PWM on 12kHz.
- 10.05.2004: Pipe works...
- 12.05.2004: Brass screws mounted to close windchest. Mains filter mounted
on back of controller.
- 13.05.2004: Construction of scaled cones for the reed pipes. Some made from
brass, some from lead/tin (40/60) organmetal. Lowest 6 pipes roughly tuned.
- 14.05.2004: Pipe intonation works.
- 24.05.2004: Ghislain Potvlieghe contacted, for pipe intonation works. Placement
of new shallots and reeds seems appropriate.
- 07.07.2004: Still no reaktion from Ghislain... Start construction of stainless
steel steering tube.
- 08.07.2004: TIG welding of stainless steel steer. Mounting in backwheel
fork.
- 11.07.2004: new attempt to tune the pipes... Seems impossible, unless we
decide to tune only for a single fixed wind pressure. So we did, and tuned
all pipes now with motor frequency set to 33.2Hz (GMT motor slider position/
midi volume controller setting = 20). The problem with the motor becoming
generative and the error this causes for the controller, when decellerating
is now solved by programming the decelleration time to 60 seconds.
- 12.07.2004: Finalisation of small funnel-horns on pipes. This has a funny
effect as an auditory illusion: if you play a climbing scale, the timbre sounds
like a descending scale! Glueing the shallots and reeds in the pipe blocks,
leads clearly to a more stable tuning and much better tonal stability. The
glue used is acid free silicone (Loctite).
- 14.07.2004: <GeroTrump> tested: first interactive piece for Trump.
- 17.07.2004: Demo piece for Trump and Picra interfaces finalised.
- 19.07.2004: further debugging on Picra interfacing.
- 15.08.2004: Picra interface to Trump now perfect.
- 05.10.2004: Pic reprogrammed: some minor bugs removed. Some note-off's switched
off some other notes sounding as well.
- 07.02.2005: redesign of motor PWM controller circuit. We get rid of the
optor circuit. The midi scale of windpressure (ctrl 7) will have to be changed
as well.
- 15.04.2005: Normal setting for wind controller is now 100. (Controller frequency
32Hz)
- 29.08.2005: Tuning and intonation request adressed to Ghislain Potvlieghe.
- 01.09.2005: All pipes transported to Ghislain Potvlieghe's workshop for
restoration, intonation and tuning.
- 02.09.2005: cleaning work on windchest.
- 22.09.2005: New intonation and tuning session by Ghislain Potvlieghe &
Zonen.
- 20.04.2006: Tuning corrected.
- 15.02.2007: retuning required...
- 19.08.2007: Trump retuned and reintonated.
- 31.08.2008: Some bugs removed from the Trump testcode in GMT.
- 11.12.2008: Tuning and intonation session by gwr.
- 09.11.2016: Were we visionary when designing Trump? He's now president...
- 25.11.2020: Photo-shoot with <Trump>, as apparently we did not have
any hires pictures of <Trump>...
- 26.11.2020: Web streaming session with <Trump>, via the Logos Facebook
page. The story of the Goerlitz lions roar rechecked: this automaton is part
of a clock mechanism installed in the tower of the old townhall in Goerlitz,
Germany. The mechanism indeed makes use of organ pipes.
- 22.12.2024: <Trump> is in need of a new deep tuning and intonmation
session... If ever we need to replace or upgrade the PIC processor, we will
have to go for a 18F2620 type as the original 18F256 is long obsolete now.
Last update: 2024-12-22
by Godfried-Willem Raes
Technical data sheet and maintenance instructions:
- Motor specs: 3 phase, 50Hz, 230/400V, 0.45HP (1.9A /0.9A), delta connected.
- Motor Controller: Hitachi L100-004NFE with mains filter.
- PIC controller: Microchip 18F252, software version PIC_TRUMP.BIN, V1.01,
by Johannes Taelman
- Power supply: 24V DC/ 4A, the 5V power is generated and integrated on the
PIC board.
- Note: the optical insulation was designed for the original Lust motor controller
we had (and burned out...). The Hitachi controller replacing this one has
optical insulation on board and thus strictly speaking does not require the
optor circuit on the PIC board. Hence in february 2005 the circuit was changed
to direct PWM control.
- The new scaling and previous scaling with the optor circuit was:
-
| Midi input to PWM (controller 7,
volume) |
PWM voltage on controller input |
Motor frequency (Hz) |
Measured resistance of LDR in OptoR |
Motor frequency (Hz) |
Wind pressure in windchest |
| 0 |
0V |
1Hz |
40M Ohm (after 10 seconds) |
0 |
0 |
| 1 |
|
|
6k6 |
|
|
| 2 |
|
|
4k1 |
|
|
| 4 |
|
|
2k4 |
|
|
| 8 |
|
|
1k3 |
|
|
| 14 |
|
|
|
30.0 |
|
| 15 |
|
|
|
30.6 |
|
|
16
|
|
|
720 Ohm |
31.2 |
|
| 17 |
|
|
|
31.8 |
|
| 18 |
|
|
|
32.3 |
|
| 19 |
|
|
|
32.8 |
|
| 20 |
|
|
|
33.2 |
|
| 32 |
|
|
391 Ohm |
|
|
| 64 |
|
|
217 Ohm |
|
|
| 127 |
10V |
50Hz |
125 Ohm |
45 Hz |
280 mm H2O |

-
- Robody picture with Trump:
- Photo: Bart Gabriel
