|
<Puff>
Godfried-Willem
RAES
2003-2007
|
<Puff>
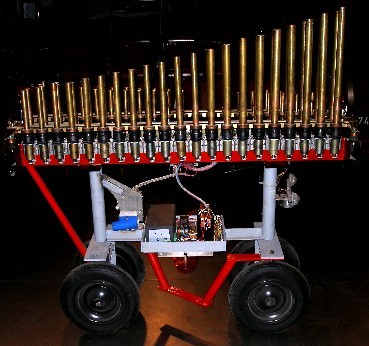
This robot realizes a percussive organ in which every single note is driven
by an individual small bellow. All of these bellows are on their turn driven
by strong and fast operating solenoids and hence, produce a single but precisely
controllable puff of wind on each stroke of the solenoid. The instrument has
no equivalent in existing musical instruments. It has 84 different notes. The
compass is 3.5 octaves and the instrument is tuned in equal temperament quartertones
( 2^(1/24) intervals). The scale starts at midi note 55 (equivalent to the lowest
note on the violin) running upward to 96. Because of its extended range in the
high treble and its quartertone tuning, this robot lends itself particularly
well to music using spectral harmony techniques. If enough energy is send to
the solenoids, the pipes can also be made to overblow. In this case, the duodecimo
will sound, since we used closed pipes.
Musical dynamics are implemented by applying pulse width modulation techniques
in the driver circuits. The pulses can vary in the range 1ms to 80ms. The circuitry
used is very similar to that developed for our <Vibi>
, <Player Piano> and <Tubi>
automaton, although in this case, we did not use hardware timers (Intel 8054)
but six PIC controllers, thus avoiding the necessity of yet another dedicated
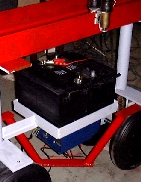
laptop computer. The picture below shows an assembly of solenoid and bellows
as used in this robot:

The power supply for the solenoids is 24V dc, 120A peak such that simultaneous
strokes on all bellows, does not burn out the power supply. The power for the
solenoids should come up only after initialization of the PIC controllers. Hence
always first switch on the mains power (with the 24V feed fully off) and after
that, the 24V power switch. The piston-cylinder combinations are custom made
by Airpot Corporation. They are made of Pyrex glass (fragile!) and have an outside
diameter of 48.5mm (1.9"). Inner bore: 44,5mm (1.75"). The height
of the cylinders, including the closing caps is 50mm. The stroke is 25.4mm (1")
and thus the volume of air compressed equals 40cc (2.4 cu "). The site
of the manufacturer is at: http://www.airpot.com. If anybody would be interested
in using these devices, a word of warning is not misplaced here: these devices
are terribly expensive (1 airpot costs 322 € and the solenoids go for 180€
each, thus one single note mechanism will cost you no less then 502€)
Each PIC controller steers 16 notes. There are six PIC boards in the instrument,
all working in parallel. Since the PIC's take MIDI as input signal, we do not
need a laptop in this case to control the instrument. The midi channel is fixed
in the firmware to channel 13. The firmware is available from the puff
directory on this site. Look for the puffx.asm files.
Mapping:
Midi note range: 55-96 for the normal chromatic pitches and 7-49 for the notes
a quarter tone higher. Within our programming environment for real time composition,
<GMT>, fractional midi notes can be used: 55, 55.5, ... 60, 60.5, 61,
61.5 ....96, 96.5
Note Off commands are not required. Velocity is implemented and has a wide
control range. On high velocity values, the pipes may overblow. Maximum repetition
rate is compromised by the duration of the pulses and thus by the velocity value
requested. When the pulses are 80ms long, the repetition rate cannot exceed
1/ (80ms + 30ms) = 9Hz, or 9 notes a second. At the smallest practical velocity
values, the maximum repetition rate is limited by the mechanics of the solenoid-bellows
assembly. The fastest possible rate is ca. 30Hz. At velocity levels of 127 (=40ms)
the repetition rate should be kept below 12.5Hz, otherwise the airpot will stick
high and have no audible effect. More over, the solenoids risk burning out.
At velo level 64 (-20ms) 25Hz is the maximum. The mechanical maximal repetition
rate requires velocity levels below 42. The lower values giving the best musical
results.
Midi Implementation Table:
| Midi Command |
byte1 |
byte2 |
remarks |
| Note Off |
notes: (lights)
[53,54],100-105, 120-122
123, 124
|
-
release not implemented
not yet mounted, but implemented in the firmware
|
the note off command is not required for the pitched notes |
| Note On |
7 - 48 (Quartertones)
55-96 (Normal tones)
100, 101,102
104,105 (orange lights)
120
121
122
123, 124
|
velo implemented (0-64)
velo implemented (0-64)
rotating orange flashlight (3-bit binary control)
note on/off only
Red LED under motor ctrl board (on/off)
White LED, Left eye
White LED, Right eye
To be mounted. PWM controlled lights.
|
|
| Note Pressure |
not implemented |
- |
|
| Controllers |
30 |
Eye motor position 0-63= left, 64=center, 65-127=right |
|
| |
31 |
Motor speed (default is 64) |
|
| |
66 |
on/off controller |
|
| |
67 |
calibrate left sensor for motor movement |
|
| |
68 |
calibrater right sensor for motor movement |
|
| |
69 |
calibrate center position for motor movement and eyes |
|
| |
90 |
interactive PIR sensor dependent eye movement
- 0 = disabled
- 1 = integrated behaviour
- 2 = fast direct mapping
- 3 = fast integrator
- 4 = relaxed integrator
|
|
| |
123 |
all notes off |
|
| Channel Aftertouch |
not implemented |
|
|
| Program Change |
not implemented |
|
|
| Pitch Bend |
not implemented |
|
|
The <Puff> robot also has a MIDI Output, used for firmware debug but
also for reading the triggers from the build in movement sensors. The output
channel equals the input channel. Details to be published in due time.
The hard/firmware mapping was designed as:
Power supply circuit:
Quartertone pipes
Our first experiments
were directed to constructing the pipes for <Puff>
from PVC material. Later we decided to go for brass pipes. Long
term tuning stability and clarity of speech being the main concern. The type
of brass used for the pipes became Ms63-F45 (hard) [440-540 M/mm2 tensioning
strength, Brinell Hardness 135, ASTM (USA) 270-274 = AFNOR UZ36 - DIN CuZn37].
This is the same material we had used before for the construction of tubular
bells. The blocks where made of brass staff material DIN CuZnPb3 = ASTM 360
= AFNOR UZ39PB2, Brinell Hardness 90). The pipes stand on a round base cut from
red copper staff material, 50mm diameter and 10mm thickness]. The windholes
and reaming for the pipes in the stand were made on a lathe.
Quartertone pipes made of brass:
note: diameters mentioned in the table are internal sizes. Add 2mm for
external diameters!
- Diam: 30 length: 413 L-ak= 431 frequency: 196.8886
Note: 55
- Diam: 30 length: 400 L-ak= 419 frequency: 202.6579
Note: 55.5
- Diam: 30 length: 388 L-ak= 407 frequency: 208.5962
Note: 56
- Diam: 30 length: 377 L-ak= 395 frequency: 214.7086
Note: 56.5
- Diam: 30 length: 366 L-ak= 384 frequency: 221
Note: 57
- Diam: 30 length: 355 L-ak= 373 frequency: 227.4758
Note: 57.5
- Diam: 30 length: 344 L-ak= 363 frequency: 234.1413
Note: 58
- Diam: 30 length: 334 L-ak= 352 frequency: 241.0022
Note: 58.5
- Diam: 30 length: 324 L-ak= 342 frequency: 248.0641
Note: 59
- Heigth of pipe base: 50
- Total length of tube for diameter 30 required = 3301 mm
- Diam: 28 length: 315 L-ak= 332 frequency: 255.3329
Note: 59.5
- Diam: 28 length: 306 L-ak= 323 frequency: 262.8148
Note: 60
- Diam: 28 length: 296 L-ak= 314 frequency: 270.5158
Note: 60.5
- Diam: 28 length: 287 L-ak= 305 frequency: 278.4426
Note: 61
- Diam: 28 length: 279 L-ak= 296 frequency: 286.6015
Note: 61.5
- Diam: 28 length: 270 L-ak= 288 frequency: 294.9996
Note: 62
- Diam: 28 length: 262 L-ak= 279 frequency: 303.6438
Note: 62.5
- Diam: 28 length: 254 L-ak= 271 frequency: 312.5412
Note: 63
- Diam: 28 length: 246 L-ak= 264 frequency: 321.6994
Note: 63.5
- Heigth of pipe base: 46
- Total length of tube for diameter 28 required = 2613 mm
- Diam: 26 length: 240 L-ak= 256 frequency: 331.1258
Note: 64
- Diam: 26 length: 233 L-ak= 249 frequency: 340.8286
Note: 64.5
- Diam: 26 length: 226 L-ak= 242 frequency: 350.8156
Note: 65
- Diam: 26 length: 219 L-ak= 235 frequency: 361.0953
Note: 65.5
- Diam: 26 length: 212 L-ak= 228 frequency: 371.6762
Note: 66
- Diam: 26 length: 206 L-ak= 222 frequency: 382.5672
Note: 66.5
- Diam: 26 length: 199 L-ak= 215 frequency: 393.7772
Note: 67
- Diam: 26 length: 193 L-ak= 209 frequency: 405.3158
Note: 67.5
- Diam: 26 length: 187 L-ak= 203 frequency: 417.1924
Note: 68
- Heigth of pipe base: 42
- Total length of tube for diameter 26 required = 2088 mm
- Diam: 24 length: 183 L-ak= 197 frequency: 429.4171
Note: 68.5
- Diam: 24 length: 177 L-ak= 192 frequency: 442
Note: 69
- Diam: 24 length: 171 L-ak= 186 frequency: 454.9516
Note: 69.5
- Diam: 24 length: 166 L-ak= 181 frequency: 468.2827
Note: 70
- Diam: 24 length: 161 L-ak= 176 frequency: 482.0044
Note: 70.5
- Diam: 24 length: 156 L-ak= 171 frequency: 496.1282
Note: 71
- Diam: 24 length: 151 L-ak= 166 frequency: 510.6659
Note: 71.5
- Diam: 24 length: 146 L-ak= 161 frequency: 525.6296
Note: 72
- Diam: 24 length: 142 L-ak= 157 frequency: 541.0317
Note: 72.5
- Total length of tube for diameter 24 required = 1683 mm
- Diam: 22 length: 138 L-ak= 152 frequency: 556.8851
Note: 73
- Diam: 22 length: 134 L-ak= 148 frequency: 573.2031
Note: 73.5
- Diam: 22 length: 130 L-ak= 144 frequency: 589.9992
Note: 74
- Diam: 22 length: 126 L-ak= 139 frequency: 607.2875
Note: 74.5
- Diam: 22 length: 122 L-ak= 135 frequency: 625.0824
Note: 75
- Diam: 22 length: 118 L-ak= 132 frequency: 643.3987
Note: 75.5
- Diam: 22 length: 114 L-ak= 128 frequency: 662.2517
Note: 76
- Diam: 22 length: 111 L-ak= 124 frequency: 681.6572
Note: 76.5
- Diam: 22 length: 107 L-ak= 121 frequency: 701.6313
Note: 77
- Heigth of pipe base : 40
- Total length of tube for diameter 22 required = 1375 mm
- Diam: 20 length: 105 L-ak= 117 frequency: 722.1906
Note: 77.5
- Diam: 20 length: 101 L-ak= 114 frequency: 743.3524
Note: 78
- Diam: 20 length: 98 L-ak= 111 frequency: 765.1343
Note: 78.5
- Diam: 20 length: 95 L-ak= 107 frequency: 787.5544
Note: 79
- Diam: 20 length: 92 L-ak= 104 frequency: 810.6316
Note: 79.5
- Diam: 20 length: 89 L-ak= 101 frequency: 834.3849
Note: 80
- Diam: 20 length: 86 L-ak= 98 frequency: 858.8342
Note: 80.5
- Diam: 20 length: 83 L-ak= 96 frequency: 884
Note: 81
- Diam: 20 length: 81 L-ak= 93 frequency: 909.9031 Note:
81.5
- Total length of tube for diameter 20 required = 1138 mm
- Diam: 18 length: 79 L-ak= 90 frequency: 936.5654
Note: 82
- Diam: 18 length: 77 L-ak= 88 frequency: 964.0088
Note: 82.5
- Diam: 18 length: 74 L-ak= 85 frequency: 992.2564
Note: 83
- Diam: 18 length: 72 L-ak= 83 frequency: 1021.332
Note: 83.5
- Diam: 18 length: 69 L-ak= 80 frequency: 1051.259
Note: 84
- Diam: 18 length: 67 L-ak= 78 frequency: 1082.063
Note: 84.5
- Diam: 18 length: 65 L-ak= 76 frequency: 1113.77
Note: 85
- Diam: 18 length: 62 L-ak= 74 frequency: 1146.406
Note: 85.5
- Diam: 18 length: 60 L-ak= 72 frequency: 1179.998
Note: 86
- Total length of tube for diameter 18 required = 959 mm
- Diam: 16 length: 60 L-ak= 69 frequency: 1214.575
Note: 86.5
- Diam: 16 length: 58 L-ak= 67 frequency: 1250.165
Note: 87
- Diam: 16 length: 56 L-ak= 66 frequency: 1286.797
Note: 87.5
- Diam: 16 length: 54 L-ak= 64 frequency: 1324.503
Note: 88
- Diam: 16 length: 52 L-ak= 62 frequency: 1363.314
Note: 88.5
- Diam: 16 length: 50 L-ak= 60 frequency: 1403.262
Note: 89
- Diam: 16 length: 48 L-ak= 58 frequency: 1444.381
Note: 89.5
- Diam: 16 length: 47 L-ak= 57 frequency: 1486.705
Note: 90
- Diam: 16 length: 45 L-ak= 55 frequency: 1530.269
Note: 90.5
- Total length of tube for diameter 16 required = 823 mm
- Diam: 14 length: 45 L-ak= 53 frequency: 1575.109
Note: 91
- Diam: 14 length: 43 L-ak= 52 frequency: 1621.263
Note: 91.5
- Diam: 14 length: 42 L-ak= 50 frequency: 1668.77
Note: 92
- Diam: 14 length: 40 L-ak= 49 frequency: 1717.668
Note: 92.5
- Diam: 14 length: 39 L-ak= 48 frequency: 1768
Note: 93
- Diam: 14 length: 38 L-ak= 46 frequency: 1819.806
Note: 93.5
- Diam: 14 length: 36 L-ak= 45 frequency: 1873.131
Note: 94
- Diam: 14 length: 35 L-ak= 44 frequency: 1928.018
Note: 94.5
- Diam: 14 length: 34 L-ak= 42 frequency: 1984.513
Note: 95
- Total length of tube for diameter 14 required = 720 mm
- Diam: 12 length: 34 L-ak= 41 frequency: 2042.664
Note: 95.5
- Diam: 12 length: 32 L-ak= 40 frequency: 2102.518
Note: 96
- Diam: 12 length: 31 L-ak= 39 frequency: 2164.127
Note: 96.5
An extra feature of this robot is that we gave it movable 'eyes'.
To achieve this a stepping motor controlling the position of a paired couple
of lights is used. The schematic is very straightforward:
The midi mapping for the control of eye movement will be clear
for the mapping table above. The stepping motor is MAE HY200-2220-018C5, Type
4240593 EC862773D, a four phase type with 200 steps per revolution. 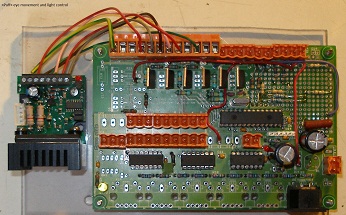
Two orange lights are fitted on the front and back side of the
robot. These are mapped on midi notes 104 and 105. In 2007 we added a rotating
orange light underneath the robot. This light is mapped on notes 100, 101, 102.
Note 100 serves as msb and 102 as lsb, such that a 3 bit speed and light strength
control is possible. As yet, the uses of the one and only free pin on board
4 , mapped on note 103 is still to be determined.
Technical specifications:
- size: 1500mm(L) x 400mm(W) x 1480mm(H)
- weight: ca. 250kg
- Power: 230V ac , 400Watt.
- Tuning: in quartertones, based on A=442 Hz
- Ambitus: 3.5 octaves (Midi 55 to 96)
- Sensors: two PIR movement sensors and two proximity sensors for the motor
control.
- Maximum sound pressure level: to be determined
- control: Puff can respond to midi commands through its midi port. It listens
to channel 13.
- Insurance value: 54.000 Euro.
Design, research and construction: dr.Godfried-Willem
Raes
Collaborators on the construction of this robot:
- Mark Maes (pipe construction, tuning & intonation)
- Bert Vandekerkhove (mounting, requisites)
- Johannes Taelman (firmware PIC microcontrollers, 2003)
- Kristof Lauwers (GMT-coding)
- Moniek Darge (painting and coloring advise)
As soon as it was ready, this robot became an integral part of the <M&M>
robot orchestra.
Music composed for <Puff>:
- Godfried-Willem Raes
- "Geropuff" for <Puff> and invisible instrument (2004)
- "Preliminary Puffs", for <Puff> and invisible instrument.(2003)
- "Qua Puff", for Puff and radar controlled invisible instrument
(2004)
- Sebastian Bradt "The Kobirds" (2004) [available
on CD LPD012]
- Kristof Lauwers "Nieuw interaktief stuk" (2004)

Nederlands:
<Puff> 
Puff is een nogal merkwaardig soort robot orgel, waarbij er evenveel
blaasbalgen zijn als orgelpijpen! Door deze aanpak werd een volledige en volstrekt
polyfone aanslaggevoeligheid gerealiseerd. Elke pijp wordt vanuit een eigen,
door een elektromagneet aangedreven balgje, van lucht voorzien. Door pulsbreedte
modulatie van de stroom door de spoel, kan de luchthoeveelheid heel nauwkeurig
worden geregeld. In tegenstelling tot een traditioneel orgel echter, leveren
de hier gebruikte balgjes geen ononderbroken luchtstroom, maar slechts een enkele
windstoot: een puf. Vandaar ook de naam van deze robot. Het gehele instrument
is gestemd in kwarttonen en heeft een tessituur van drie en een half oktaaf.
De basisdiapason voor het instrument is 442Hz. De laagste noot komt overeen
met de laagste noot van de viool, in midi termen, noot 55. De tessituur loopt
door tot noot 96. De intervallen zijn telkens 2^(1/24) groot. De toonhoogte
is in enige mate afhankelijk van de aanblaassterkte, wat inflekties mogelijk
maakt. Bij grote aanblaassterktes, kunnen de pijpen ook overgeblazen worden.
Aangezien we gesloten (gedekt, in het orgeljargon) pijpen gebruikten, klinken
de noten dan een duodeciem hoger, wat de tessituur uitbreidt tot 115. De gemonteerde
kombinatie van elektromagneet (Lucas Ledex Inc. type FRUXAC64700, cat. nr. 195115-002)
en balg (Airpot 73710-6) ziet eruit als:
Een kleine waarschuwing voor potentiele nabouwers: deze kombinaties kosten
502€ per stuk...
Voor het pijpmateriaal werd een harde soort messing gebruikt: Ms63-F45 (DIN
CuZn37 = werkstof 2.0321). Voor de kernen, handmatig gevijld uit massief messingstaaf,
de zachtere legering Ms58 (DIN CuZn39Pb3 = werkstof 2.0401), die echter niet
te lassen is. De pijpassemblage werd dan ook met zilver-solderen uitgevoerd.
Het uitfrezen van de pijpvoeten in roodkoper en van de windgaten gebeurde op
de draaibank.
De voeding werd aanvankelijk opgebouwd met twee heel zware 12V loodakkus (100Ah)
voorzien van een permanent aangesloten lader, maar zowel om ekologische als
ekonomische redenen, voorzagen we Puff in 2007 van een geheel nieuwe voeding.
De akkus hadden immers een levensduur van twee tot hooguit drie jaar en waren
aan vervanging toe. De nieuwe voeding maakt gebruik van een Siemens Sitop 24V/20A
schakelende voeding met konvektiekoeling gebufferd middels twee 150mF/40V bekerelkos.
In 2010 werden aan <Puff> enkele nieuwe features toegevoegd: twee PIR
sensors stellen de robot nu in staat om menselijke bewegingen te volgen en daarop
te reageren middels bewegingen van de twee ogen. Voor de besturing van de stappenmotor
en de witte LED's in de ogen, werd een extra PIC microcontroller ingezet.
<Puff> luistert naar midi kommandos op kanaal 13.
Bouwdagboek:
Omdat ons vaak wordt gevraagd hoeveel werk en tijd kruipt in,
en nodig is voor, het bouwen van een muzikale robot, hebben we ook voor <Puff>
een beknopt bouwdagboek bijgehouden:
- 03.11.2003: eerste ideen en konkrete tekeningen naar aanleiding van een
aanbieding van een stel elektromagneten met balgen uit een fabrieksrestant.
- 05.11.2003: Levering van de partij elektromagneten; 84 stuks blijken intakt
en bruikbaar.
- 06.11.2003: opmetingen karakteristieken elektromagneten, luchtdruk en debiet
van de balgjes. De elektromagneten zijn type 195115-002 van Lucas Ledex Dormeyer
(dat bedrijf, gevestigd in Vandalia, Ohio, lijkt wel zowat een monopolie positie
te hebben op de markt van kwaliteits elektromagneten...) en zijn gewikkeld
voor een nominale spanning van 23.5V. De DC weerstand, koud, is 3.6 Ohm. De
nominale stroom per spoel komt daarmee op 6.5A te liggen. De repetitiesnelheid,
bij aansturing met pulsen gaande van 3 tot 80ms, kan maximaal 30Hz zijn. De
voeding zal behoorlijk zwaar dienen te zijn: bij gelijktijdige aansluiting
van alle spoelen, zouden we gedurende 80 ms een stroombehoefte hebben van
maar liefst 798A... Buffering met heel grote elektrolieten en/of met een zware
loodakku (24V/ 100Ah) lijkt dan ook aangewezen, evenals uiteraard, een limitering
via serialisatie in de software. In elk geval zal voor de bedrading een behoorlijk
zware draadsektie gebruikt moeten worden.
- 07.11.2003: begin konstruktie stalen chassis. De spoelen worden om en om
gemonteerd op twee lengtes L profiel 100x100x8, met een lengte van 1390mm.
Er zijn vier rijen spoelen en elke rij telt 21 spoelen. Hoofdchassis geboord,
zijstukken in kokerprofiel (100x50*x380) uitgezaagd en klassiek gelast, vanwege
de eerder grote profielsterkte. Besprekingen mogelijkheid tot gebruik van
PIC controllers voor direkte aansturing vanuit midi met Johannes Taelman.
Specifikatie van de nodige schakelfunkties. Minstens zes PIC controllers zijn
nodig.
- 08.11.2003: Ontwerp en bouw wielstel. Wielassen: geharde as, 25mm diameter,
doorlopend per wielpaar. Vork uit plat 10mm dik. Kruisdisselbesturing uitgewerkt.
Vertikale draaiassen: 2" (60mm) koncentrisch met 6/4" buis (52mm):
lagering in Teflon. Duw- en trekveren te monteren. Wielen 38cm diameter.
- 09.11.2003: Stalen draagstruktuur afgelast. Kruisdissel met besparing bovenruimte
voor akku gelast. Houders ventielen op L profiel gespoten (Rood RAL 3000).
Trekveer gemonteerd in voorwielas (6mm draad, diameter 45mm, lengte 35 cm)
. Stuurstang met inox handgreep gelast. Ook hier veren voorzien zo dat de
handgreep wanneer niet in gebruik geen extra ruimte inneemt.
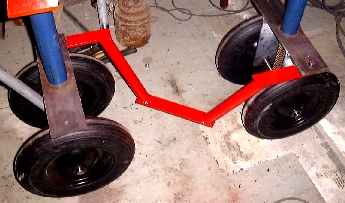


- De werkfotoos hierboven geven de details van de eerste atelierwerkzaamheden
vrij goed weer.
- 10.11.2003: Inkoop 2 nieuwe 12V akkus en lader voor 24V vrachtwagenakkus.
Draagstruktuur gelast voor akkus. De lader kan nu plaatsvinden onder de accus.
Het grote gewicht van <Puff>, met gemonteerde akkus, noodzaakte ons
tot de konstruktie van een loopkat voor de ateliertakel.
- 11.11.2003: Montage automatische akkulader onder akkukompartiment. Modifikatie
schakeling akkulader. Test voedingsschakeling. Schilderwerk ondergedeelte
chassis. (Zinkoxyde coating). Mail met printontwerp en schema binnengekomen
van Johannes Taelman. De export van Gerber plots schijnt nog problemen op
te leveren.
- 12.11.2003: Montage eerste puff-ventielen op rubber trillingsdempers. Boutjes:
Inox 4mm x 35mm, Hex-inbus. Montage akkuklemmen en verbinding met lader. Konstruktie
en montage zekeringenkast. (Zekeringen: 6 x 40A, 1x 3A, 1x 10A). Eindontwerp
uitvoering bedrading vermogenselektriciteit. Schema: zie engelse kommentaartekst
hierboven.

- 13.11.2003: Zoektocht naar een geschikte wals programmaschakelaar. Montage
42 puff-ventielen. Test 5V voeding. Montage massa kontaktstrips (omgebouwde
auto zekeringenkast). Software geschreven voor de berekening van de kwarttoonspijpjes.
De berekende lengtes zijn toegevoegd in de engelse tekst hierboven. Pijpdiameters
kunnen varieren van 40mm tot 10mm. De voeten kunnen konisch worden gedraaid
in kunststof op een metaaldraaibank.



- 14.11.2003: Montage 2e rij puff ventielen. Ongeluksdag. Enkele pyrex puffers
gebroken... PCB ontwerp verstuurd naar Digit printservice.
- 15.11.2003: Opzoekwerk naar de site van de fabrikant: http://www.airpot.com.
- 16.11.2003: Pyrex cilinders besteld bij Airpot corp.
- 17.11.2003: Koncentrische messingpijp besteld. Walsschakelaar besteld.
- 18.11.2003: berekeningssoftware ontworpen voor de kwarttoonspijpen en hun
mensurering voor messingbuis, wanddikte 1mm..
- 19.11.2003: 3 gebroken pyrex airpots van gebroken glas ontdaan.
- 21.11.2003: Nylon staaf ingekocht voor fluitkernen. Rem gemonteerd op voorwiel.
Draaibank besteld.
- 26.11.2003: PC boards geleverd voor PIC controllers. Start bestukking en
soldeerwerk.
- 27.11.2003: soldeerwerk PC boards
- 28.11.2003: Konstruktie inox draagplaat voor walsschakelaar , midi konnektoren
en CEE netstekker. Bedrading netstroom gedeelte en walsschakelaar. Montage
MIDI-konnektors (1 x IN, 2x THRU).
- 29.11.2003: Konstruktie draagstruktuur voor de zes processor boards. Soldeerwerk
processor boards. Uitwerking midi bedrading. Montage en afregeling 5V voedingsgedeelte.
- 30.11.2003: 18u kwazi ononderbroken bedrading gesoldeerd... Alle puffers
zijn nu verbonden met de Weidmueller konnektors en met de gemene plus van
de voeding. Voedingsaansluitingen aangesloten op zekeringenkast.
- 01.12.2003: Levering messing voor pijpwerk. Marc Maes: Bestudering materialen.
Levering eerste geprogrammeerde PIC controller voor board 1 door Johannes
Taelman. Bedrading logic power supply naar PIC boards voor eerste tests. Poging
tot herstelling met epoxy van gebroken puffer.
- 02.12.2003: Bedrading MIDI input en Thru. Levering Contimac metaaldraaibank.
Montage draaibank.
- 03.12.2003: Test midi input en buffering.
- 05.12.2003: Start konstruktie pijpen: Marc Maes. Vooras in gehard staal
afgedraaid op draaibank. Omega ringen gemonteerd. Konstruktie toegelicht in
interview voor BBC radio.
- 06.12.2003: Achteras afgedraaid op draaibank. Omega ringen gemonteerd. Puff
kan nu rijden. Nieuw assortiment metaalvijlen ingekocht voor konstruktie pijpwerk.
Circliptang gekocht.
- 07.12.2003: Bestaande verstorven rubberdempers afgesneden en vervangen door
viltkussentjes. Twee airpot's gelijmd met doorzichtig epoxyhars (Loctite 3430).
Kabelboompjes aangelegd.
- 08.12.2003: Levering IRL640 Power Mosfets. Verlijming reserve airpot met
Loctite 3430. Onderzoek fel witte LED's voor licht. Alle power mosfets ingesoldeerd.
Op de ontbrekende PIC controllers na, is het hart van <Puff> nu volledig
operationeel. Verder werk aan pijpen door Marc Maes.
- 09.12.2003: Start konstruktie lichten met felwitte LED's. Ontwerp stappenmotor
sturing voor lichtpositionering. Test elektronika op soldeersluitingen.
- 10.12.2003: Mapping 'eyes' changed. All controlls should be implemented
with the spare drivers on board 3: Weidmueller pins 0,1,2,8 each control a
phase of the stepping motor (pulsed operation), whereas pins 9 and 10 (ON/OFF)
controll the bright LED lights. This requires the midi note mapping to be
changed as: notes 49,50,51,52: motor phases and note 53,54: light switches.
- 11.12.2003: Konsole gelast voor stappenmotor oog-lichten. Bedrading stappenmotor
en lichten gelegd. Alle besturingen hiervoor komen voor rekening van board
3.
- 12.12.2003: levering 18F252 PIC controllers.Experimenteersessie kwarttoonspijpen
uit messing.
- 13.12.2003: Test board 1 with midi input: works fine but all notes are shifted
offset 1...
- 14.12.2003: PIC debug sessie met Johannes Taelman. Persistent probleem met
output 15 op de Weidmuellers... Experimentele set pijpen aangebracht ter evaluatie
van de aanslag.
- 15.12.2003: Prototype hoge pijp gemaakt in messing. Kernblok en inblaasvoet
in een enkel stuk. Atelier werk met Marc Maes en Johannes Taelman.
- 16.12.2003: Eerste publieke demo van het <Puff> projekt: bijna half
af... Stappenmotor en lampjes werken naar behoren. Enkele puffers doen het
nog niet en er zijn nog wat problemen met de mapping.
- 17.12.2003: hardware en mikrokode debug. Alles lijkt nu naar behoren te
werken. Alle zes PIC's zijn geprogrammeerd en de mapping lijkt te kloppen.
- 18.12.1003: Verdere test kode toegevoegd aan GMT in module g_gorgel.exe.
(source: puff.inc).
- 19.12.2003: Konstruktie pijpwerk in messing.
- 05.01.2004: vervolg pijpkonstruktie in messing door Marc Maes.
- 09.01.2004: Pijpkonstruktie Marc Maes
- 13.01.2004: Pijpkonstruktie: 7 pijpjes klaar. Voetsstukjes in roodkoper
ontworpen met bevestiging aan chassis.
- 14.01.2004: Tweede publieke demo: <GeroPuff> gedemonstreerd met Emilie
De Vlam.
- 19.01.2004: Pijpkonstruktie: 14 pijpjes klaar.
- 22.01.2004: Pijpkonstruktie: 16 pijpjes klaar.
- 23.01.2004: Pijpkonstruktie 19 pijpjes klaar.
- 25.01.2004: Pijpkonstruktie 24 pijpjes klaar.
- 29.01.2004: Levering nieuwe lastafel Welda.
- 30.01.2004: Levering massief roodkoper, 2m lengte 50mm diameter. Begin zagen
in plakjes van 10mm. Centeren op draaibank. Boren doorlaat 5.5mm en frezen
opzetkonus voor Airpot puffers. In te kopen: vingerfrezen in maten overeenkomstig
pijpbuitendiameters. Levering nieuw Argon gas.
- 31.01.2004: Alle 84 plakjes roodkoper afgezaagd. Draaiwerk roodkoper pijpvoeten:
alle konussen onderzijde afgedraaid. Vlak draaiwerk voor pijpen 16mm en 18mm
afgewerkt. In te kopen: boren met morsekonus MK2, diameters 16mm, 18mm, 20mm,
24mm, 26mm.
- 01.02.2004: 9 pijpvoeten ingefreesd op 20mm met vlakke houtboor (vlinderboor)
in vast gedeelte draaibank (met koelvloeistof). Ridgid metaalzaag op gelaste
zaagtafel gemonteerd.
- 02.02.2004: Bevestiging pijpen op chassis ontworpen. Draaiwerk pijpvoeten
diameters 28,24,22mm, telkens 9 stuks afgewerkt. Nog te doen: diameters 30,32,
26 en 14mm.
- 03.02.2004: Draaiwerk pijpvoeten 26, 30 en 32 mm uitgevoerd met vlinderboren.
Marc Maes: enkele extra pijpjes afgewerkt.
- 12.02.2004: Pijpwerk Mark Maes. 29 pijpjes afgewerkt. Puff operationeel
gemaakt binnen M&M orkest.
- 15.02.2004: Puff partij geimplementeerd in Descent, als akt in Technofaustus.
- 23.02.2004: Werksessie pijpen Mark Maes.
- 24.02.2004: Werksessie pijpen Mark Maes. 47 pijpen afgewerkt. Sokkels voorzien
van inslagnummers.
- 26.02.2004: Soldeerproeven pijpen met hete lucht bunsenbrander. Vijf pijpen
gesoldeerd.
- 27-28.02.2004: Soldeerdagen. Alle 46 reeds afgewerkte pijpen gesoldeerd.
Basis plaat met 2.8mm Zilver-Tin (AgSn) soldeer, labium naad met SnPb soldeer
0.6mm.



- 29.02.2004: soldeertechniek gedokumenteerd
in kursus...
- 01.03.2004: pijpvoeten van inslagnummers met de (midi) noten voorzien.
- 04.03.2004: zaagwerk laagste 9 pijpen (vanaf midi noot 55): Messing buis
32/30. Bouwplan pijpvoeten:

- 05.03.2004: laagste 9 pijpen gemonteerd en gesoldeerd.
- 06.03.2004: pijpen voor noten 59.5 tot en met 63.5 gebouwd, gemonteerd en
gesoldeerd. Onderdelen voor pijpen 64 tot en met 68 gedraaid, gezaagd en gefreesd.
- 07.03.2004: Extra pijp voor noot 88 gebouwd. Pijpen 64-68 afgewerkt. Voetblokken
voor diameter 26/24 gedraaid, gefreesd en gevijld. Messing buis 26/24 blijkt
niet geleverd... Er blijven nog 9 pijpen af te werken. Op de foto hieronder
zijn de inwendige onderdelen van de pijpvoeten te zien. Op de bovenste rij
liggen de stoppen voor het uiteinde van de pijpen. Op de onderste rij, de
pijpbasissen.

- 08.03.2004: Zijsteunen pijpwerk ontworpen.

- 09.03.2004: Pijpje 96.5 gebouwd en gesoldeerd. Zijsteunen voorzien van oranje
lichten: midi mapping op noten 104 en 105. De zijsteunen worden gemonteerd
op trillingsdempers M10, 40mm diameter. Test software g_gorgel.exe in GMT
aangepast.
- 10.03.2004: 24V/15W bajonet lamp geplaatst in lampvoet voorkant. Koperen
voetstukken gedraaid diam.41mm, hoogte 13mm voor plaatsing messing profielen
uiteinde.
- 11.03.2004: Schilderwerk: rood en zwart.
- 12.03.2004: Bevestiging schakelingen op chassis. Bestelling betere remschoenen.
Puf 96.5 uitgebrand... (Stuk Sebastian Bradt).
- 13.03.2004: Herstelling noot 96.5: hele werkdag... (Mosfet doorgebrand,
spoel uitgebrand, Airpot gebarsten...). Nieuwe airpot gebouwd uit chroombuis
(uitgedraaid), met zuiger uit aluminium. De velo scaling in de PIC's moet
gewijzigd worden. Bereik 1 to 20ms lijkt ruimschoots voldoende.
- 16.03.2004: Puff gedemonstreerd aan Christian Wolff. Achteraf, ongeval bij
afrijden Puff van hellend vlak in tetraederzaal vanwege de nog niet vast gemonteerde
pijpen: pijpen omgedonderd als een kegelspel met breuk in 5 pijpen voor gevolg.
Opnieuw gesoldeerd.
- 23.03.2004: try out met 'Quadrada Vectorial'. Voorlopige pijphouderlat gemonteerd
in staal.
- 25.03.2004: Levering 26/24 messing buis. Ontbrekende 9 pijpen verder afgewerkt.
Messing T-profiel gezaagd en bewerkt voor vasthouder pijpwerk. Definitief
stemwerk kan beginnen...
- 26.03.2004: Werksessie Godfried & Marc: Pijpen 55-72, kromatische reeks
gestemd en dichtgessoldeerd met zilver. Rem ontwerp gewijzigd: nu met kogelgewricht
op M12 schroefdraad. Opgelet: de bouten (messing) waarmee de pijphouder vastzit
zijn 5/8", engelse schroefdraad. Vastzetten met vleugelmoeren in messing.
Niet verwarren met M10. Pijpreeks 73 - 78 heeft wellicht oortjes nodig ter
verlaging van de grondtoon. (Mensuurfout!)
- 27.03.2004: Pijpen 55-75,5 gestemd en stoppen gesoldeerd. Pijp 73.5 volledig
nieuw gemaakt. Transportbeveiliging ontworpen.
- 28.03.2004: Grof stemwerk pijpen 75 tot 80 (kwarttoons) en tot 96, kromatisch.
Enkele pijpen opnieuw gebouwd, wegens mensuurprobleem. Nieuwe rem gemonteerd.
- 29.03.2004: Pijp 73 (24/22mm) volledig opnieuw gebouwd (eerste versie gaf
teveel ruis). Ringbeugels gezaagd voor de laagste 9 pijpen.
- 30.03.2004: Verder stemwerk met Marc Maes. Rubberbanden voor bevestiging
pijpen verbeterd. Viton ringen 1.78mm dik, diameter 15.6mm, Shore hardheid
70, rond spoelkernen aangebracht ter demping van de aanslag. Pijpklemrek voor
transport gebouwd in hout.
- 31.03.2004: verstevigingsbeugels gemaakt voor alle pijpen tot en met diameter
20mm. Eerste verpakkingstest: Puff klaargemaakt voor transport naar Parijs.
- 01.04.2004: Puff naar Parijs...: Exit festival. Schitterende performance
van <GeroPuff> met Emilie De Vlam.
- 05.04.2004: Puff terug uit Parijs.
- 09.12.2004: Mosfet voor noot 93 doorgebrand, door teveel overlappende repeats
met hoge velocity waarden... Hersteld.
- 07.02.2005: Observatie okkazionele oscillatieproblemen van de akkulader.
- 15.02.2007: De transfo in de akkulader (franse makelij...) begint vervaarlijk
veel te zoemen. We zoeken een alternatief voor de lader.
- 08.04.2007: Nieuwe automatische 24V lader besteld bij Farnell.
- 12.04.2007: Nieuwe lader geleverd. Tests.
- 16.04.2007: Montage nieuwe automatische 24V lader. Type: EA-BC524-11RT,
Elektro-Automatik, Viersen, Deutschland. De akku's blijken echter totaal versleten
te zijn... Ook de antieke nieuw gemonteerde voltmeter blijkt niet te werken.
- 17.04.2007: de ventilator van de nieuwe lader blijkt nu weer problemen op
te leveren... Hij blaast periodiek. Voltmeter hersteld: de draadgewikkelde
precisieweerstand (uit 1938...) was gekorrodeerd en stuk. We vervingen hem
door een modern 0.1% metaalfilm exemplaar van 4999 Ohm. De draaispoelmeter
zelf is een milliamperemeter met een schaalbereik van 10mA. Een alternatief
voor de Puff voeding zou zijn: een Siemens Sitop 24V/20A SMPS voeding met
konvektiekoeling met 500mF aan bufferelkos... We bestelden alvast bij Farnell
enkele 150mF/40V elkos (ca.75 Euro per stuk...) voor de ombouw van de voeding.
Dit blijkt evenwel heel wat goedkoper dan om de drie jaar twee nieuwe 100Ah
akkus.
- 18.04.2007: Verdere herberekening voeding.
Layout plan nieuwe voeding uitgetekend en ingepast in bestaande laskonstruktie.
- 20.04.2007: Nieuw inox subchassis gebouwd voor de voeding. Zwaailicht ondersteboven
onder de robot gemonteerd. De nokkenschakelaar die we hadden - eigenlijk een
ster driehoekschakelaar- blijkt onbruikbaar in de nieuwe kontekst, tenzij
we er alleen de primairen mee zouden schakelen. We beslisten het gehele akku-gedeelte
met lader uit het ontwerp te schrappen.
- 21.04.2007: Afzonderlijke netspanningsschakelaar gemonteerd. De paneelmeter
-voltmeter- wijst nu de spanning op de elkos aan. De zwaailicht schakeling
is nu aangesloten op konnektor 4b. Pic assembler kode aangepast aan nieuwe
mapping.
- 22.04.2007: Nieuwe PIC gemonteerd en getest: werkt o.k. Harley-Davidson
lamp gemonteerd aan de low-side van Puff: nieuwe fitting gemonteerd en kogelkopverbinding
gesoldeerd op de messing drager. Lampje: 24V/10W halogeen.
- 31.08.2008: Upgrade doorgevoerd van de GMT testkode.
- 27.05.2010: Puffs right eye needs a checkup. It does not turn on anymore...
- 18.08.2010: Pipe 84.5 needs retuning and soldering of its endcap.
- 01.10.2010: Revision of the eye motor movement and the eye's themselves.
We are considering using a dedicated PIC processor for this task. Movement
sensing can than be integrated as well.
- 03.10.2010: Assembly of a modified midi-hub board (version 3) to use as
a controller board for the eye movements and some sensors. Construction of
a mounting plate for the Pepperl+Fuchs end position sensors. Construction
of a mounting system for the PIR sensors.
- 04.10.2010: Further mounting works. Final assembly of the PIR sensor carrier.
First experimental mounting of the Pepperl+Fuchs proximity sensors. Note that
these operate on 24V DC and hence need an attenuator network for interfacing
to our PIC board.
- 05.10.2010: Wiring of the midi hub board used:
- 06.10.2010: First debugged version flashed into the motor control board.
This be version 1.0
- 13.10.2010: Tests in GMT seems ok Some adjustments on the sensors required.
- 09.11.2010: Code in motor control board improved. Now version 1.3. Some
bugs in the interpretation of the PIR signals removed. Sampling rate for the
PIR's lowered.
- 16.11.2015: Cleanup and check of power supply. Puff still works fine.
- 27.08.2021: <Puff> goes to the SMAK museum for all of the month september.
- 01.09.2021: Dust removed from the cicuit boards.
- 02.09.2021: Opening of the robot exhibition at SMAK.
- 27.09.2021: <Puff> returned from SMAK. It has been playing for 25
days continuously. Some solenoid/pump assemblies found to be loose on the
back row.
- 14.09.2023: <Puff> joins the robot orchestra in its trip to the Deutsche
Oper Berlin. The 'Zeroth Law' production by Gamut Inc. was performed in 27,
28 and 29th of september 2023 at the Tischlerei. All performances were fully
sold out.
- 02.10.2023: <Puff> returned heavily wounded from its trip to Berlin.
Many of the blow-out nipples on the pumps found broken off by heavy shaking
and improper securing during transportation. This will be a complicated repair
involving some preparatory study work. However, the electronics and the valves
themselves seem all to work fine.
Afmetingen & andere technische specifikaties:
- hoogte: 1480mm (gemeten aan de langste pijp)
- breedte: 1500mm (exakt)
- diepte: 400mm (exakt)
- gewicht: ca. 200kg (na te wegen)
- maximale geluidsdruk: te bepalen
- Vooraleer de robot aan te schakelen, verifieer de stand van de hefboomschakelaar:
deze moet op off staan en de door de voltmeter aangewezen spanning moet kleiner
zijn dan 5V. Pas onder deze voorwaarden mag met de wipschakelaar onder het
voedingsgedeelte, de netspanning worden ingeschakeld en daarna pas, de hefboomschakelaar
in de aan-stand gezet. Bij uitschakelen, steeds eerst de hefboomschakelaar
in de off-stand zetten en dan pas de netspanningsschakelaar uitzetten.
- stemming: kwarttoons vertrekkend van een diapason van La = 442Hz
- tessituur: midi 55 tot en met 96 in kwarttonen. Bij overblazen 55 tot 115.
- zwaailicht: gemapt op midi noten 100, 101, 102 (msb-lsb, 3 bits snelheidskontrole)
- data-poort: Midi port. (hardwired to listen to midi channel 13 only)
- Transport: een vrachtwagen met laadlift is noodzakelijk. De pijpen moeten
beschermd worden met de daarvoor speciaal voorziene bekistingen. Deze worden
vastgeschroefd op de messing pijphouder profielen met de bijhorende vleugelmoeren.
- Verzekeringswaarde (produktiekost): 55.000 Euro.
Design, research en staalkonstruktie: dr.Godfried-Willem
Raes
Atelier medewerkers:
- Bert Vandekerkhove (montage en requisitering)
- Marc Maes (messing pijpkonstruktie, stemming en intonatie)
- Johannes Taelman (PIC microcontrollers)
- Kristof Lauwers (test kode in GMT)
- Moniek Darge (inkleuring)

Last update: 2023-10-11
by Godfried-Willem Raes
Maintenance information:
- Light bulbs used:
- back side brigth orange light: Halogen Lamp, type JC G4, 24V - 10W (110
Lumen, 2000h)
- front side dark orange light: Halogen Lamp, type JC G4, 24V - 10W (110
Lumen, 2000h)
- Rotary light: Halogen Lamp 24V/ 70W, mapped on midi notes 100,101,102
(msb-lsb)
- LED spotlites inside chassis: 2 x 12V, mapped op midi note 103
- 1W LED Red mounted under motor control board, mapped on midi note 120
- Eye lights: 1W power LED. Left eye mapped on midi note 121, right eye
on midi note 122
PC-board layout:
The hefty electrolitic capacitors used as high current buffers in the power
supply are rated as 'long life'. That seems to mean a guaranteed lifetime
of 20000h. So, in continuous operation one can expect these components to
fail after two and a half years... If replaced, they have to be rated 150mF
each at 40V dc. They are fixed to the chassis with M12 nuts. The negative
pole is connected to the can and to the nut/bolt.
Detailed steering details for the rotating flashlight:
| note 100 |
note 101 |
note 102 |
current |
power |
| off |
off |
off |
0 |
0 |
| off |
off |
on |
1.08A |
26W |
| off |
on |
off |
1.37A |
33W |
| off |
on |
on |
1.76A |
42W |
| on |
off |
off |
1.89A |
45W |
| on |
off |
on |
2A |
48W |
| on |
on |
off |
2.1A |
50W |
| on |
on |
on |
2.2A |
53W |
Eye & Motor mechanism (rev. 10.2010)
2 PIR-STD passive infrared movement sensors (Hygrosens. http://www.hygrosens.com).
Mounted in a thick aluminium profile with epoxy resin. The power supply voltage
for these is taken from the logic +5V.
2 Pepperl+Fuchs proximity sensors (NBB2-V3-E2)
Midihub board Version 3, with modifications for sensor inputs. Pic processor
18F2525. Firmware written in Basic and compiled with the Proton+ compiler
under MPLAB. Circuit diagram.
Pic source code in assembly language
(Eye control PIC) Version 1.1
Pic source code & downloads for high
resolution pictures
