| <Bako> |
|
an automated bass accordion
Godfried-Willem RAES
2006-2008
|
Robot:
'Bako'
Bass accordions are quite rare instruments. You will encounter
them only as a part of larger accordion orchestras, a dying out species in itself.
As far as I know, there was never a piece written for bass accordion solo...
We came up with the idea for such an instrument as a request from the many robot
orchestra users and composers for a reasonably small but still strong sounding
and very low pitched instrument. According to the laws of acoustics, this seems
like mission impossible... if there weren't free vibrating reeds. Hence our
call upon the bass accordion.
The practical design of this musical robot started with a second hand Hohner
bass accordion we purchased from Hans Kuik. First of all, we restored and retuned
the whole instrument. The instrument has 34 notes, each note with the usual
couple of reeds: one set for suction, one for blowing wind. So, in total we
have 68 reeds inside the instrument. Other than in the case of <Ake>,
our automated 'normal' accordion, here we decided to keep the original bellows
and to automate them, rather than using an electric blower connected to a difficult
to make and to control 4-way valve. For pressure regulation and control, we
made use of an integrated bipolar pressure sensor by Freescale Electronics (type
MPXV7002DP) . The measured pressure is compared with the soll-value as set with
midi controller 7 and the motor controlled accordingly, correcting for any differences
in absolute pressure. Note that for accordions, wind pressure is -within limits-
proportional to sound volume, so the mapping on controller 7 seems appropriate.
The motor control makes use of a brush DC servo amplifier module by Advanced
Motion Controls (type 12A8). All power supplies were designed using hefty analog
circuitry thus avoiding switch mode power supplies with their inherent leakage
currents, short life time, spurious noises and oscillation problems when confronted
with fast switching heavy inductive loads.
Another important difference with the <Ake> design is
that in this case we removed all human playing interfaces (keyboard) completely
and decided to activate the pallets directly with pull-type solenoids. This
mainly to avoid the annoying mechanical noises produced when using push type
solenoids for playing the 'human' keys. These points of departure in the design
made a pure vertical construction (with horizontal pallets and vertically moving
bellows) obvious. This way we could use gravity alone to keep the pallets closed
at rest. As a consequence, a precize horizontal placement of this robot became
mandatory.
The constructional parts for this robot are all made from stainless steel, as
can be seen on the pictures below taken during the construction:
Inside view on the reeds:

 |
|
Motor construction:
 |
|
Underchassis:

Pallet lifting solenoids:
 |
The welding was performed using the manual TIG process. Only parts that have
to remain accesible and removable for maintenance and repair were assembled
with bolts and nuts.
It is important to leave the trapezoidal thread well greased at all times.
This minimizes wear as well as unwanted mechanical noises.
Mapping and midi implementation:
 |
|
- Midi note range: 24 - 57. Velocity implemented. (use very low values,
avoid noise)
- Note Off commands are required.
- Channel Pressure implemented.
- Controller 1: pre-pressure setting (0-127) [60 is a good setting]
- Controller 7: absolute value of windpressure (volume) (0-127) , optimum
range: 35 - 120.
- Controller 20: blow (1) or suction (2) wind. With any other value,
the selection will be automatic. This is a 'one shot' controller.
- Controller 66: enable motor servo controller power
- Controller 70: Center bellows command (slow, used for initialisation)
[0-127=pos, 60 is about halfway]
- Controller 123: all notes off Resets all controllers, except 7. Stops
motor.
- Midi notes: 16,17,18,19,20,21,22,23: lights upper part (ON/OFF)
- Midi notes: 10,11,12,13,14,15: lights lower part (ON/OFF)
- Midi Channel: 7 (counting 0-15)
- NOTE: polyphony limited to 20 notes simultaneous.
Bako is equiped with a midi-out connector, for interactive applications.
The data flow is about 4 bytes a second for each controller. The implementation
of the midi output is as follows:
- Controller 16: bellows position read by the Sharp distance sensor
- Controller 17: bellows pressure read by the Freescale sensor
- Controller 18: CW pwm value for the motor (speed)
- Controller 19: CWW pwm value for the motor (speed)
|
Technical specifications:
- sizes: 450mm x 800mm, heigth: 1100mm
- weight: estimated ca. 40kg
- power: 230V / 700W (peak)
- ambient tempurature must be at least 10°C
- tuning: based on A=440 Hz
- Ambitus: midi note 24-57
- Insurance value: 9.500 Euro
Design and construction: dr.Godfried-Willem
Raes (2006-2007)
Collaborators on the construction of this robot:
- Xavier Verhelst (music adviser)
- Kris De Baerdemacker (wheel research)
- Johannes Taelman (firmware PIC controllers)
- Kristof Lauwers (application code)
Music composed for <Bako>:
Godfried-Willem Raes '007-Marsch' (2007)
Godfried-Willem Raes 'Picra-Bako' (2007)
Godfried-Willem Raes 'Tango Tre' (2007), bass part.
Godfried-Willem Raes 'Winterteen' (2010)
Kris De Baerdemacker: 'For Ake and Bako' (2007)

Nederlands:
Robot:<Bako>
Voor de bouw van deze akkordeon robot, vertrokken we van een
Hohner bas akkordeon, een weinig koerant en moeilijk te verkrijgen type dat
eigenlijk alleen gebruikt wordt in grotere akkordeonorkesten die tegenwoordig
wel met uitsterven zijn bedreigd. Na veel zoeken vonden er eentje bij Henk Kuik.
De bouw ving aan met de grondige restauratie en nazicht van zowel de mechanische
werking als de stemming van het oorspronkelijke instrument.
Eens het hele instrument opgeknapt en in kaart gebracht, trokken we onze lessen
uit de automatisering van het gewone akkordeon <Ake>. Daar hadden we immers
de bestaande kleppen en mekanieken zoveel mogelijk behouden en haalden ons daardoor
extra veel werk op de hals met het buigen uit inox van de vele nodige trakturen.
Het rezultaat was in die zin geen sukses, dat al die mekanieken overbodig veel
bijgeluiden veroorzaakten. Omdat we dat hier wilden vermijden beslisten we het
gehele klavier te verwijderen en in de vuilnisbak te gooien en de kleppen rechtstreeks
te lichten met trekmagneten. Voor het goed afsluiten van de toonkancellen kan
dan gewoon de zwaartekracht worden gebruikt. De magneetankers in weekijzer hebben
een gewicht van ca. 20g, wat alleszins voldoende leek om de klep ook bij normale
blaaslucht gesloten te houden. In de praktijk echter dienden we de kleppen toch
wat te moeten verzwaren voor een goede afsluiting bij drukwind. De balg daareentegen
wilden we behouden, vooral om de ingewikkelde konstruktie van een elektrische
blazer gekoppeld aan een automatisch 4-weg ventiel voorzien van sensoren te
vermijden.
Voor de aandrijving van de balg opteerden we voor de meest kompakte oplossing:
een inox trapeziumschroefdraad van 12 mm doorsnede (later vervangen door een
20 mm exemplaar) rechtstreeks aangedreven door een DC motor. Dit type trapeziumschroefdraad
levert een lineaire verplaatsing op van 3.1mm per omwenteling. De vereiste bewegingssnelheid
van de balg bepaalden we -na uitvoering van enkele metingen met akkordeonspelers
en wat eigen experimenten- op 10 cm per sekonde. Een absolute maximumsnelheid
(bij de grootst mogelijke klusters) kon worden bepaald als 30 cm/s. Voor een
snelheid van 10 cm per sekonde van de balg, moet de trapeziumdraad dus 32.2
omwentelingen maken per sekonde. Het nominale toerental van de motor wordt dan
32.2 x 60 = 1935 rpm. Om dit te bereiken komen zowel AC als DC motoren in aanmerking.
We beslisten uiteindelijk een DC motor in te zetten met volgende specifikaties:
toerental bij 20 V: 450 rpm (6 A/80 Watt) en bij 210 V: (3.5 A/700 Watt). Die
laatste waarde levert een toerental van 7000 rpm maar mag slechts met een duty
cycle van 15% worden toegepast. Dit toerental levert ons een balgverplaatsingssnelheid
op van 35 cm per sekonde, wellicht een stuk meer dan wat ons basakkordeon kan
verdragen. Gezien de inherent geringe inertie van een dergelijk systeem, zijn
snelle snelheidsveranderingen evenals veranderingen van de bewegingsrichting
mogelijk. Uiteraard moet een mikrokontrollerbestuurde PWM diodebrugschakeling
of H-brug worden gebruikt voor de aansturing. Hiervoor gebruikten we uiteindelijk
een geintegreerde servo versterker module voor DC kollektormotoren van Advanced
Motion Controls. (Type 12A8). Wanneer geen noten gespeeld worden, stopt de motor.
Om overbodig aan/uit schakelen van de motor en de induktiestoten die dit veroorzaakt
te vermijden, voorzien we in een doorlooptijd van ca. 100 ms na ontvangst van
de laatste note-off. De luchtdruksturing voor deze robot maakt gebruik van een
geintegreerde bipolaire druksensor van Freescale Electronics. Met deze sensor
wordt de momentane druk in de balg op elk moment gemeten. Een PIC processor
staat er voorts voor in dat de gemeten druk in overeenstemming is met de gewenste
druk, zoals bepaald door de waarde geset via midi kontroller 7. De mapping op
kontroller 7 ligt voor de hand, omdat bij akkordeons de geluidssterkte een funktie
is van de winddruk.
Voor de besturing van de kleppen werden -voor het eerst voor dit doel in onze
reeks automaten- deze keer trekmagneten toegepast. De verzwaarde kleppen blijven
dicht onder invloed van de zwaartekracht. De elektromagneten lichten de kleppen.
We kozen voor cilindrische trekmagneten, eerder dan het type magneten (pallet
valves) dat we eerder toepasten in onze automatische orgels, vanwege het veel
grotere bewegingstrajekt dat hierdoor kan worden bereikt. Inderdaad, de kleppen
moeten hier minstens 12 mm gelicht kunnen worden voor een goede klankprojektie.
Met traditionele klepmagneten uit de orgelbouw zoals o.m. geleverd door de firma
A.Laukhuff, kan hooguit 5mm bereikt worden.
Het is belangrijk de trapeziumschroefdraad ten allen goed gesmeerd
te houden. Wagenvet voor lagers is daarvoor ideaal.
Voor een gedetailleerde bouwbeschrijving verwijzen we naar
het bouwdagboek, verder op deze webpagina.
Ontwerp en konstruktie: dr.Godfried-Willem
Raes (2006-2008)
Medewerkers bij de bouw en ontwikkeling van de <Bako> robot:
- Xavier Verhelst (opzoeking en inkoop basinstrument)
- Kris De Baerdemacker (opzoeking en inkoop wielen)
- Johannes Taelman (2007, firmware PIC controllers)
- Kristof Lauwers (user interface en toepassingskode)

Geillustreerd bouwdagboek:
Omdat ons vaak wordt gevraagd hoeveel werk en tijd kruipt in,
en nodig is voor, het bouwen en ontwikkelen van een muzikale robot, hebben we
ook voor <Bako> een beknopt bouwdagboek bijgehouden. Omdat we de bouw
tot in de laatste details graag illustreren, kan het ook voor anderen die ons
op dit pad willen volgen en/of verbeteren, van praktisch nut zijn.
- 15.05.2006: aankoop Hohner bas akkordeon bij de firma Henk Kuik.
- 16.05.2006: eerste ideen en konkrete tekeningen.
- 05.10.2006: demontage van het instrument. Verwijdering van het speelklavier.
Wegnemen en markeren van de kleppen met een heteluchtpistool.
- 06.10.2006: Bestelling 40 Blackknight trekmagneten bij Farnell. Opmeting
bewegingssnelheden van akkordeonbalgen en uitzoeken van de geschiktheid van
trapeziumschroefdraad. Motor selektie. Uiteindelijk opteerden we voor een
sterke DC kollektor motor. De geruisloze werking en het hoge aanloopkoppel
gaven de doorslag.
- 07.10.2006: Uitzagen inox profielen (20x50x2) en staven (30x10) voor de
bevestiging van het klinkend gedeelte van het akkordeon. Bestelling spakenwielen.
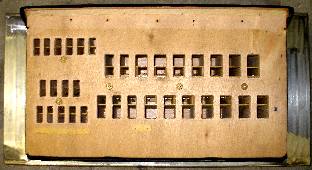
Hieronder een zicht op de toonkancellen.
Deze worden individueel gesloten of geopend met rechhoekige kleppen.
|
De met was gemonteerde rieten, aan de andere
zijde en normaal verscholen in de balgruimte zelf, zijn de zien op deze
foto:
|
- 08.10.2006:
Konstruktie inox chassis voor de motor en de 12 mm trapeziumschroefdraad.
Al deze konstruktie delen werden gelast uit 10 mm dik inox AISI304 plaat.
(foto uiterst rechts)
 Op de foto (hiernaast) is de Thomson DC motor gemonteerd in het chassis. Een
zuivere vertikale en gecentreerde uitlijning is van essentieel belang voor
een latere geruisloze en friktievrije werking. De elastische spidex koppeling
naar de trapezium schroefdraad (inox, 12mm) is goed te zien. Aan de onderzijde
rust de motor in een inox ring, buitendiameter 51mm opgelast op de basisplaat.
Op de foto (hiernaast) is de Thomson DC motor gemonteerd in het chassis. Een
zuivere vertikale en gecentreerde uitlijning is van essentieel belang voor
een latere geruisloze en friktievrije werking. De elastische spidex koppeling
naar de trapezium schroefdraad (inox, 12mm) is goed te zien. Aan de onderzijde
rust de motor in een inox ring, buitendiameter 51mm opgelast op de basisplaat.
- 09.10.2006: Uitwerking midi implementatie en berekening van de konsekwenties
daarvan voor de mikrokontrollerbesturing. Levering trekmagneten Farnell.
- 10.10.2006: Montage microswitch sensor voor de begrenzing van het trajekt
bij gesloten balg binnenin het mechanisme. Research naar geschikte spakenwielen
met massieve banden.
- 11.10.2006: Rolstoelwielen blijken nog het meest in aanmerking te komen,
al is de as met 12 mm aan de kleine kant. Twee exemplaren besteld. Diameter
:610 mm. TIG laswerk uit plat 30x3 en 25x3 voor de dragers van de trekmagneten.
Aftekenen boorpatroon voor de 15 mm gaten. Boren van de gaten.
- 12.10.2006: Laswerk tweede rechthoekdrager zoals die waarmee het akkordeon
omvat wordt.
- 13.10.2006: uitzagen prototype voor stanggeleiding van de palletheffertjes
in rood koper.
- 14.10.2006: solderen basis midihub board.
- 15.10.2006: Eerste toevoeging van testkode in GMT. Ontwerp ikoon voor bako.
- 16.10.2006:
uitzagen, boren (gat 2.4 mm op 4.5 mm van de rand) en vijlen van 40 rood koperen
palletheffertjes (15 mm x 2 mm x 50 mm). Oplassen 70mm dragers voor geleider
van deze heffertjes. Boren gaten voor M4 boutjes.
-
19.10.2006: Snijden vier schuine opstanden onder een hoek van 36 graden. Lengte
340 mm, inox 30x10 plat geslit AISI304 opstanden. Laswerk onderchassis.
- 20.10.2006: Uitwerken details van de schakeling voor het midihub board en
de motor kontrole funkties.
- 27.10.2006: Bewegingstest balg onder motorbesturing. Stabilisatie blijkt
nodig: ofwel een tweede trapezoidale moer gelast op een elastisch bevestigde
flens, ofwel een lateraal kogellager eveneens op een brede flens.
- 28.10.2006: Verder laswerk draagstruktuur voor de elektromagneten. Pas en
meetwerk palletheffertjes. Eerste proefmontage van alle elektromagneten met
pallerheffertjes op de draagstruktuur.
- 29.10.2006: Laswerk 30 mm buis voor verbinding onder- en bovenhelft.
- 31.10.2006: Bespreking met Johannes Taelman van de ontwerpmodifikaties aan
het midi-hub board.
- 01.11.2006: Ontwerp en begin konstruktie opstand voor de elektromagneethouders.
- 07.11.2006: Precizie opmeting maten opstanden.
- 08.11.2006: Nazicht ontwerp PC board midihub, versie 3.
- 09.11.2006: Voorlopige assemblage helemaal losgemaakt: balg verwijderd,
rieten uit draagchassis weggehaald.
- 10.11.2006: Bovenchassis vastgelast aan onderchassis met 4 inox buizen van
30 mm diameter. Naden gelast in korte strekken en telkens direkt met perslucht
gekoeld. Boren van de gaten voor de bevestiging van de elektromagneethouders
(20 mm). Bouten in inox M20 x 180 besteld bij MEA.
- 11.11.2006: Montage elektromagneethouders met 8 inox M6x25 bouten op het
chassis. Dit blijft dus volledig demonteerbaar. Aftekenen geleidingsgaten
3 mm voor de palletgeleiders.
- 12.11.2006: Boren en uitlijnen palletgeleiders. Inox M3 inbus boutjes met
moer als afstandhouder. De dikte van een inox M3 moer is precies 2.2mm, wat
ons 0.2mm speelruimte geeft. Uitzagen en vijlen palletgeleiders. Voorste rij
palletjes met kalfslederafdichting vastgezet met siliconenrubber op de koperen
geleiders.
- 13.11.2006: Uitlijnen achterste rij palletgeleiders. Inox afstandbus opnieuw
gezaagd, nu 25mm.
- 14.11.2006: Alle polsters vastgezet aan de palletjes met silikonenrubber.
Een rij spoelen met loctite groen voor cilindrisch bevestigen, trilvrij gemonteerd
en uitgelijnd. Grondige herberekening van de voedingsvereisten.
- 15.11.2006: Solderen en bestukken van de drie PIC pc-boards voor de spoelbesturing.
Het elektronisch principeschema komt overeen met dat gebruikt voor <Harma>,
<Player Piano> en <Qt>. De onderdelenwaarden en nomenklatuur is
evenwel op enkele kleine punten afwijkend:
 De reeks PC boards lieten we helemaal vergulden omwille van de oxyde vrijheid.
De reeks PC boards lieten we helemaal vergulden omwille van de oxyde vrijheid.
- 16.11.2006: afwerking soldeerwerk pulse-hold boards. Montage Weidmueller
konnektoren en IRL640 mosfets. Afmeten voedingsrails in massief koper.
- 17.11.2006: Levering MEA M20 inox bouten en trapeziummoeren.
- 21.11.2006: Konstruktie rood koperen voedingsrails.
- 23.11.2006: Slijpwerk lasnaden inox.
- 24.11.2006: Konstruktie houder voor de printplaten met de spoelbesturing.
Bepaling plaatsing lampjes op het bovendeel.
- 25.11.2006: Bevestiging met Loctite van de moeren van de spoelen. Afregeling
van de pallet trakjekten voor minimale wrijving. Fixeren M2 moeren met cyaanakrylaat.
- 26.11.2006: Tweede testmontage met balg, nu voorzien van een bronzen lagerbus.
Bedrading en kablering van de noten 24-29 naar het eerste PIC controller board
met Weidmueller konnektors. Bevestiging en solderen draden voor de vier E10
fitting lampjes boven de PC boards op het vroegere toetsenbord. Hiervoor kunnen
zowel LED lampjes als gloeidraad-exemplaren gebruikt worden.
- 27.11.2006: Bedrading en kablering tweede PIC controller board: noten 30-43
Bedrading derde PIC controller board: noten 44-57.
- 28.11.2006: Bedrading lampjes E10 sockets. Mapping voorzien op noten 20-23.
- 29.11.2006: bipolaire druksensoren besteld bij Freescale. Ontwerp elektronika
voor drukbesturing via midi kontroller 7. Freescale typenummer: MPXV7002DP,
een industrieel type met een drukmeetbereik van -2kPa tot +2kPa, overeenkomstig
een meetbereik in 'orgelbouweenheden' van -200mmH20
tot +200mmH20. De gevoeligheid is 1V per kPa. Wanneer
we het signaal samplen met een resolutie van 10 bits, dan kunnen we dus 9bits
overhouden voor het bereik -1kPa tot +1kPa (-10mB tot +10mB) dat ons voor
Bako interesseert. Ruim meer dan de 7 bits resolutie die we via midi kunnen
bepalen.
- 30.11.2006: Uitmeten en selektie voedingstransfo voor de motorbekrachtiging.
Levering 61cm spaakwielen met massieve banden. Lassen as met aan beide uiteinden
M12 schroefdraad in inox vierkante buis 25x25.
- 01.12.2006: TIG laswerk asbrug. Uitsnijden montageplaat voor de beide grote
voedingstransformatoren: 270x160x3. De transformatoren kunnen ondersteboven
aan de onderzijde gemonteerd worden, terwijl dan plaats overblijft voor het
midi-hub board en de midi-input konnektors aan de bovenzijde. Eerste proefmontage
van de wielen.


- 02.12.2006: Ontwerp vastzetpoot of zwenkwieltje.
- 03.12.2006: Konstruktie printhouder en bevestiging basisplaat voedingen.
- 04.12.2006: Bestelling 35A bruggelijkrichters bij Farnell. Opzoeken 5V single
supply rail-to-rail opamps voor signal conditioning van de MPXV7002 sensors.
- 05.12.2006: Afwerking laswerk chassis voor voeding en midihub board. Montage
onderdelen en begin bedrading voedingsgedeelte.

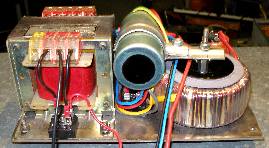 De afgewerkte
voedingseenheid is te zien op de fotos.
De afgewerkte
voedingseenheid is te zien op de fotos.
- 06.12.2006: Ontwerp van de motorbesturing gewijzigd: nu onder gebruikmaking
van een geintegreerde servo module voor DC kollektormotoren.
 Als alternatief dienden we zelf de H-brug te ontwerpen ofwel beroep te doen
op een eenvoudige schakeling met een draairichting omkeerrelais zoals:
Als alternatief dienden we zelf de H-brug te ontwerpen ofwel beroep te doen
op een eenvoudige schakeling met een draairichting omkeerrelais zoals:  Deze eenvoudige schakeling werkt heel goed, maar veroorzaakt hoorbare relais
klik-geluiden bij het omkeren van de draairichting van de motor. Da's hinderlijk
vooral omdat die kliks net in een stilte van het instrument vallen. Foto van
de gebruikte servo versterker module:
Deze eenvoudige schakeling werkt heel goed, maar veroorzaakt hoorbare relais
klik-geluiden bij het omkeren van de draairichting van de motor. Da's hinderlijk
vooral omdat die kliks net in een stilte van het instrument vallen. Foto van
de gebruikte servo versterker module:
- 07.12.2006: Definitieve montage en plaatsing voedingsmodule. Schematekeningen
aangepast. Levering van de servo versterker voor de motorbesturing. Website
van de fabrikant: http://www.a-m-c.com . Opbouw sensor printje met Freescale
druksensor chip. De buffer-opamp is nogal kritisch: CA3160 oscilleert op 300kHz,
CA3140 gaat niet tot tegen de positieve spanning aan... Het ontwerp op zich
blijkt echter goed te werken.
- 08.12.2006: Zoektocht naar geschikte rail-to-rail single supply low voltage
opamps in 8 pin Dip behuizing. Analog devices AD820AN ziet er alvast geschikt
uit... Bestelling voor tien stuks geplaatst bij Farnell. Uitsnijden en boren
basisplaat voor de frontale montage van de motor servo kontroller, de 22mF
bufferelko en de frontale lampen. De 3 mm dikke plaat wordt met 2 inox inbus
M6 bouten gemonteerd op de ashouder. Als extra monteerden we twee LED spotlampjes
evenals een halogeen centraal spotje. Deze lichten worden gestuurd door de
vrije IRLZ44 mosfets op het midihub board.
- 09.12.2006: Start bedradingswerken. Bedrading molex konnektor voor servo
versterker. Definitieve montage voedingen. Ontwerp kabelbuis voor verbinding
boven en ondergedeelte. Nieuwe specifikaties voor de PIC software opgesteld.
- 10.12.2006: Aanleg kabelboom verbinding boven en onderstuk. Afwerking bedrading
PC-boards. Montage sensorprintje. Toevoeging LT1084-12 spanningsregulator
(12V/5A) op het midihub board, dit voor de voeding van de frontale halogeenlamp
en de LED spotjes. Totaal stroomverbruik voor de lampen gestuurd door het
midihub board: 620mA. De regulator moet dit zonder koeling wel aankunnen.
De worst case dissipatie in de regulator is 5.6W (bij Ui=21V).
- 11.12.2006: studie plaatsing Sharp infrarode afstandssensor, type nr. GP2Y0A02YK
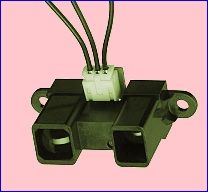 Ontwerp instelbare
montagebrug. Studie van de uitgesproken niet lineaire overdrachtfunktie van
deze sensoren. De overdrachtfunktie is: D = (A + Bx) / (1 + Cx + Dx^2), waarin
D = afstand in cm, x = gemeten spanning in Volt, A= 0.008271, B= 939.6, C=
-3.398, D=17.339. Aangezien de PIC's een ADC resolutie hebben van 10 bits
(0-1023 of 0-&H3FF), hebben we door vermenigvuldiging van de gelezen waarde
met 5, nagenoeg de uitgangsspanning in millivolt. De grenzen van het geldig
spanningsbereik zijn 0.4 V en 2.8 V, dus voor de ADC uitlezing: &H50 tot
&H230.
Ontwerp instelbare
montagebrug. Studie van de uitgesproken niet lineaire overdrachtfunktie van
deze sensoren. De overdrachtfunktie is: D = (A + Bx) / (1 + Cx + Dx^2), waarin
D = afstand in cm, x = gemeten spanning in Volt, A= 0.008271, B= 939.6, C=
-3.398, D=17.339. Aangezien de PIC's een ADC resolutie hebben van 10 bits
(0-1023 of 0-&H3FF), hebben we door vermenigvuldiging van de gelezen waarde
met 5, nagenoeg de uitgangsspanning in millivolt. De grenzen van het geldig
spanningsbereik zijn 0.4 V en 2.8 V, dus voor de ADC uitlezing: &H50 tot
&H230.
- 12.12.2006: Oplassen houder frontale mikroswitch voor de begrenzing van
het maximaal uittrekpunt van de balg. Bevestiging met 2 M3 boutjes. Bedrading
daarvan naar midihub board. Levering van de bestelde AD820AN opamps (zie Freescale
sensor interface). Programmeersessie PIC's 1,2,3 voor de noten en velocity
met Johannes Taelman. Bespreking regelsysteem voor de motorbesturing.
- 13.12.2006: Definitieve plaatsing en afregeling van de sharp distance sensor
voor preciese bepaling van de balgpositie. Montage op brug met twee M8 inox
bouten, vastgelast op de kop.
- 14.12.2006: De 7805 regulator op het midihub board blijkt toch behoorlijk
warm te worden. De oorzaak ligt allicht in het extra stroomverbruik van de
Sharp sensor (ca. 50 mA). De dissipatie van de 7805 (bij 90 mA totaal stroomverbruik)
beloopt nu 1.5W. De 5V verbruikers op zich slechts 500 mW.
- 15.12.2006: Bedrading microswitch binnenin de balg. Montage windkanaal voor
de Freescale bipolaire druksensor in de balgruimte. Aanmaak eerste proefreeks
teflon (PTFE) spietjes voor de geruisloze vertikale geleiding van de koperen
paletten.
- 16.12.2006: Verdere konstruktie teflon geleidertjes voor palletjes waar
nodig. Ontwerp en konstruktie inschuifbare poot in 25 mm inox buis. Klembout:
M8 kartelbout.
 Konstruktie en montage beugel voor achterlichten: twee LED spots, 50mm.
Konstruktie en montage beugel voor achterlichten: twee LED spots, 50mm.
- 17.12.2006: Besturings- en evaluatiekode aangepast in GMT. Dempingsviltringen
gekleefd rond aanslag elektromagneten. Duurzaamheidstest klepjes. De demping
van het geluid van de magneten na plaatsing van de aanslagviltringen is nog
steeds onvoldoende.
- 18.12.2006: dokumentatie en komponisten handleiding bijgewerkt.
- 19.12.2006: State machine kode voor de besturing ontworpen.
- 20.12.2006: Bericht van Johannes Taelman: de kode voor pic0 zal niet voor
deze week zijn...
- 23.12.2006: Bestelling ontbrekende Inox stukken voor de vizuele afwerking
- 25.12.2006: Eerste redaktie van PicRada studie voor Bako.
- 27.12.2006: Eerste programmeersessie motor PIC met Johannes Taelman: integratie
uitgeschakeld op motorservokontroller. Feedback gain naar minimum gezet. Problemen
met de mechanika van de trapeziumdraad. Deze blijkt onder bepaalde omstandigheden
knel te kunnen zitten. Tweede trapeziummoer opgelast op de draaiflens om het
slingeren te beperken. De spidex koppeling op de motor komt los te zitten
wanneer die te ver over de as geschoven wordt... De microswitch sensoren werken
al en regelen de nood-ompoling van de motor.
- 28.12.2006: Korrekties in de note mapping voor pic1 en pic2. Tests met besturingskode.
Smering van de schroefdraad met een goede dikke minerale olie of vet is absoluut
onontbeerlijk voor de goede werking. De bronzen lagerbus werd opnieuw verwijderd
wegens te luidruchtig.
- 29.12.2006: Verdere ontwikkeling motor besturingskode. Implementatie start
van een pre-pressure controller waarmee een zeker voordruk kan worden gegenereerd.
Dit wordt gemapt op midi kontroller 1. Verwerking van het signaal van de sharp
afstandssensor. Hierin blijken heel wat periodieke glitches voor te komen.
- 30.12.2006: Evaluatie binnen GMT van de resultaten sofar... Bugs: interdependencies
tussen ctrl 7 en 1. Oscillatieneigingen (pulsering) van de motor. Alle aanslag
velocities moeten een faktor 10 kleiner worden. Midi file-player in GMT aangepast.
'Contrabajuando' werkt reeds als testfile. Tegen het slingeren van de balg
zouden we ook teflon glijders kunnen aanbrengen op de zijkanten van de balg.
- 31.12.2006: Konstruktie twee inox geleidingen met vilt bekleed aan de zijkanten
van de balg, ter voorkoming van oscillaties en gevaarlijke mechanische resonanties.
Plat inox 20 x 3 x 150, omgebogen en geslepen. Dit werkt meer dan behoorlijk,
maar geeft wel aanleiding tot een wat grotere wrijving en iets meer kracht
op de trapeziumschroefdraad.
- 01.01.2007: Eerste ontwerp konstruktie beschermkap voor transportbeveiliging.
Begin uitvoering, gebruik makend van de oude aluminium beschermkap met een
toegevoegde extensie in inox. Bako kan ook spelen met de beschermkap, wat
onder bepaalde omstandigheden (publieke ruimtes, aanraakgrage toeschouwers...)
zijn voordelen kan hebben. Montage voorlopige rubberdop onder de stelpoot.
- 02.01.2007: De motorregeling durft oscilleren (snokjes) bij lagere luchtdrukken.
Dit moet nog op PIC nivo rechtgezet worden. De motor-off logika bij alle noten
uit faalt ook nog. De prepressure instelwaarden moeten erg klein worden gehouden.
Testkode verder ontwikkeld met Kristof Lauwers.
- 03.01.2007: eerste publieke pre-demo...
- 05.01.2007: Derde programmeersessie motor PIC met Johannes Taelman: wegwerken
motor oscillaties en enkele logika bugs. Het pompen van de motor is nu wel
al wat beter geworden, maar er zijn wat nieuwe bugs: prepressure gaat niet
steeds off, de lampjes knipperen traag zonder kommando daartoe...
- 06.01.2007: Verbetering van de viltgeleidingen.
- 09.01.2007: extra gewicht aangebracht op de kleppen opdat ze beter gesloten
zouden blijven bij overdruk. Het totaal gewicht is nu 58g, goed voor een afsluitkracht
van 0.57N. Als gewicht gebruikten we stoppen in rood koper gebruikt als eindstoppen
voor het dichtsolderen van 12mm waterbuis, aangezien we daarvan nog een groot
aantal in voorraad hadden en het bovendien goed paste bij de koperen palletgeleiders.
De verlijming op de paletten gebeurde voor de onderste noten met cyaanakrylaatlijm,
terwijl voor de bovenste, vanwege de mindere passing, silikonenkit werd toegepast.
- 10.01.2007: Eerste publiek koncert met <Bako>.
- 12.01.2007: Nieuwe M8 sterknop bout gemonteerd voor achterpoot.
- 13.01.2007: Controller 66 toegevoegd in GMT sturing en in de dokumentatie
op deze webpage. T0220 koelvin geplaatst op de 7805 regulator op het hub board:
werd erg warm, vooral vanwege het hoge stroomverbruik van de Sharp sensor.
- 15.01.2007: Bestelling dopmoeren M20 inox bij Mea.
- 17.01.2007: PIC debug en ontwikkelings avondsessie met Johannes : ctrl 70,
21, midi out.
- 22.01.2007: Overleg met Johannes: Controller 66 blijkt nog niet geimplementeerd
te zijn!
- 25.01.2007: levering volstaf PTFE (Teflon), 1m x 0.1m, rond. Kostprijs 690
Euro.... Voor konstruktie 30mm hoge cilindrische glijbus voor de trapezium
draad. Materiaalprijs voor dit onderdeel: 21 Euro. Levering 20 mm hoge busdopmoeren
in inox: kostprijs per stuk: 62 Euro.
- 15.02.2007: Konstruktie teflon lagerbus.
- 19.02.2007: Bako added in orchestration for "Spring '94".
- 09.03.2007: Twee palletgewichtjes zijn losgeraakt tijdens het spelen. Die
worden opnieuw vastgekleefd.
- 12.03.2007: Kris De Baerdemacker schrijft een stuk voor Bako en Ake.
- 13.03.2007: Programmeersessie regelsysteem kode voor de motorbesturing met
Johannes Taelman. Kontroller 66 nog niet geimplementeerd. Midi out geeft nu
alleen een heleboel debug informatie, nog niet de balgpositie. Achterlichten
gewijzigd: nu beide witte led spots. Met de nieuwste pic kode werkt het frontlicht
evenwel niet meer... Kontroller 20 met waarde 1 is nu steeds blazen, met waarde
2 steeds zuigen. Kontroller 70, waarmee een initiele positie van de balg ingesteld
kan worden, moet nog gerescaled worden. Nu is waarde 114 de positie voor een
volledig geopende balg, en waarde 57 die voor een volledig gesloten balg.
Teflon glijlager geplaatst op de trapeziodale schroefdraadstang. Bevestigd
met 4 M4 x 50 inox hex inbusboutjes op de onderplaat van het akkordeon.
- 17.04.2007: Nieuwe flexibele askoppelingen besteld voor de trapeziumschroefdraad.
De PIC firmware is nog steeds aan bijschaafwerk toe!
- 24.04.2007: Nieuwe flexibele askoppelingen geleverd.
- 14.05.2007: Nog enkele palletgewichtjes met siliconen vastgezet omdat ze
waren losgeraakt.
- 17.05.2007: Motor besturings PIC opnieuw geprogrammeerd. De scaling van
de positiesensor is nu anders dan hiervoor werd gedokumenteerd. De centrum
waarde ligt nu rond 60. Frontlicht kode in orde gebracht.
- 18.05.2007: Tests op de vernieuwde besturing van Bako.
- 12.06.2007: "Tango Tre" van een baspartij voor <Bako> voorzien.
Drie palletgewichtjes losgekomen en met Loctite blauwe siliconen vastgezet.
De praktisch bruikbare velocities moeten kleiner zijn dan 15. Een rescaling
is nodig.
- 14.06.2007: Suksesvolle uitvoering van "Tango Tres" met Bako partij.
- 15.06.2007: Na inlooptests blijkt de motor vast te lopen. Na nazicht van
de schroefdraadstang bleken beide opeengelaste moeren met 12 mm trapeziumschroefdraad
volledig uitgesleten te zijn. De olie op de draadstang heeft zich duidelijk
eerder als snijolie werkzaam getoond dan als smeerolie... Duidelijk een konstruktiefout.
Wellicht mogen de moeren niet zonder spatie opeengelast worden. Nieuwe trapezoidale
moeren in inox ingekocht en studie van oorzaak en oplossing van het probleem.
- 16.06.2007: De twee bestaande trapezoidale moeren uitgeboord op 11.8 mm
en nieuwe inox moer opgelast aan de binnenzijde van de balg. Geheel vastgezet
met Loctite blue silicone. Het werkt weer goed maar we blijven twijfelen aan
de duurzaamheid op lange termijn. Wellicht moeten we toch een kogellager monteren
op het boveneind van de schroefstang aan de binnenkant van de balg (vast gedeelte).
- 08.07.2007: Plaatsing rubberdop op uiteinde van de poot.
- 11.07.2007: Plaknoot 48 bijgeschuurd.
- 13.12.2007: Bug noticed: sometimes the Bako motor gives up listening to
commands. Maybe some glitches cause a PIC-reset. We must check the power supply
carefully again. Some pallets refitten with Loctite blue silicone compound.
- 16.12.2007: After the concert in Belsele ('t Ey) , the solenoid for note
28 burned out. Both mosfets died as well. There must be a bug in the firmware
causing the negative voltage to remain switched on! Debug session revealed
that the 4k7 resistor over the velo-mosfet was broken... This can explain
the stuck note as well as the melting down of the mosfet and the solenoid...
By midnite, we got everything repaired again... It was an expensive faillure
indeed.
- 19.12.2007: Bad luck seems to plague the Bako design: during the 'endings'
concert at Logos Foundation in Ghent the threaded rod mechanism failed: probably
the trapezoidal nut was worn out again. Why can't we find strength class A3
trapezoidal nuts in hardened stainless steel on the market???
- 08.01.2008: Verder zoekwerk naar een alternatief voor de trapeziumdraad...
- 22.01.2008: Schema voor het gebruikte pulse-hold board volledig hertekend.
- 11.02.2008: Ontwerp nieuwe geleiding voor de balg.
- 26.05.2008: Tweede ontwerp nieuwe stanggeleiding met extra kogellager.
- 28.05.2008: Plooi- en laswerk draagstruktuur voor het boven-lager van de
trapezoidale stang. Draaigat geboord op 11.8 mm, in 10 mm dik inox, overeenkomstig
de reeele buitendiameter van 12 mm trapeziodale schroefdraadstang. Uitgesleten
inox moer afgeslepen.
- 29.05.2008: Lagerbrug gemonteerd en getest: de draadstang blijkt nog steeds
knel te raken...
- 30.05.2008: Draadstang bijgewerkt aan uiteinde. Het mechanisme werkt nu
weer naar behoren, al is het nog veel te luidruchtig naar onze zin...
- 01.08.2008: Note hold/velo boards 1,2,3 opnieuw geprogrammeerd. Pinkode
bug gekorrigeerd. Sysex pin is nu wel degelijk 'bako'. Default velocity scaling
een faktor 6 naar beneden gerescaled. De kleinste waarde in pulseenheden voor
velo 1 is nu &H07, voor velo 64 is het &HFB en voor velo 127, &H237.
(19.2 microsekonde eenheden).
- 11.02.2009: Opnieuw is de trapezoidale moer die de balg meeneemt helemaal
uitgesleten. Ze moet opnieuw vervangen worden... Bako is nu even buiten gebruik.
- 16.02.2009: De bij Overtoom bestelde nieuwe trapeziodale draadstang, nu
diameter 20 mm, is met een stel bijhorende moeren, geleverd. Meteen een uiteinde
afgedraaid op 12 mm als vrijloop voor het bovenste uiteinde. Nu moeten we
nog een askoppeling verzinnen.
- 17.02.2009: Tweede uiteinde eveneens afgedraaid op 12 mm diameter en lengte
25 mm. Dit past in een aluminium elastische askoppeling van Farnell. As opnieuw
gemonteerd. Loopt voorlopig echter nog veel te steeg... Inroderen zal wellicht
volstaan om de zaak soepel te krijgen. Voor het koncert van vanavond blijft
hij toch nog even aan de kant.
- 10.01.2010: Bako gebruikt in 'Winterteen'.
- 29.08.2025: Gezien het toch niet echt soepel lopen van de balg, overwegen
we toch om ook een kleine radiale kompressor in te gebouwen voor de luchttoevoer.
De funktie van de balg kan dan tot expressie beperkt blijven. We zouden de
aan de kant gelegde Laukhuff Ventola kompressor die vroeger dienst deed in
<So> kunnen recycleren. Is het mogelijk de kompressor toe te voegen
en toch een druk/zuig mechanisme over te houden? Ook kunnen we de werking
van de ventielen nog wat verbeteren door hun traject met 30 to 50% te verkleinen.
Voor het geluidsvolume maakt het niets uit zoals bleek uit metingen. Om dit
te doen volstaat het de afstandhouder buizen waarop het mechanisme steunt,
met 3 mm in te korten.
- 30.08.2025: Als alternatief voor de radiale kompressor, kunnen we ook een
balgaandrijving met een wielexcentriek ontwerpen. De diameter van het drijfwiel
mag niet groter zijn dan 300 mm. Een Bauer motor met vertragingskast -zoals
ook gebruikt op <Hurdy>- hebben we ook nog op voorraad.
- 07.09.2025: Afstandhouderbuisjes (diameter 25mm) voor het mechanisme ingekort
met 5 mm (nu 105 mm lang) waardoor het bewegingstrajekt ook tot 5 mm wordt
verkleind. Dit heeft geen hoorbare gevolgen voor de geluidssterkte van het
instrument maar komt de bewegingsflexibiliteit van de toetsen zeer ten goede.
We kunnen nu met kleinere velocity waarden volstaan.
- 08.09.2025: De klep voor noot 45 (A4) blijkt losgekomen van de roodkoperen
trekker. Dit moet met elastische lijm hersteld worden.
-
- TO DO:
- Programmeren PWM voor de hold spanning, te mappen op midi channel-pressure.
Programmeren van de lookups via sysex.
- Dichtlassen uiteinden T-stuk op vastzetpoot met 25mm dekseltjes.
- Aanbrengen ingebouwd waterpas voor de opstelling.
Last update: 2025-09-08
by Godfried-Willem Raes
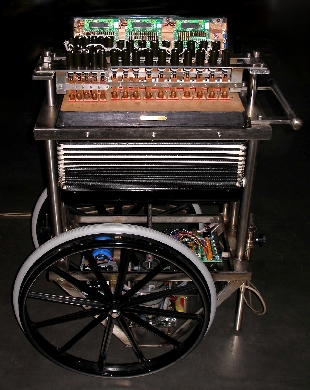
Robody picture with <Bako>:

Technical data sheet, design calculations and maintenance instructions:
Technische gegevens, ontwerpberekeningen en instrukties voor onderhoud en demontage:
- Motor: Thomson, Nevers Type A45-02-N04 (dit type gebruikten we ook in
<Springers> (voor de sirene) en in <ThunderWood>
(voor de windmachine) . Voltage to operate motor: 48V
- Solenoids: Black Knight 121 420 610 620, 12 V nominal @100% duty cycle,
Rdc=20.4 Ohm. diameter 20 mm (25 Euro a piece) Farnell order code: 4207439
. Positive hold voltage: 9 V, negative pulse voltage: -12V.
- Estimated maximum windpressure in the bellows: 100mmH2O
or 9.81mB. (=981Pa). Hence the pressure on the container is 981N/m2. The force
excerted on the pallets (surface ca. 45.E-3m2) is than 0.45N. So if the weigth
of the plungers is 20g, augmented with the weigth of the copper strip and
the pallet (16g), the closing pressure of 0.35N will not be large enough to
keep the largest pallets closed at full blowing pressure. The wind pressure
with such a weight at blowing should hence be kept smaller than 78 mm H2O
or 7.8mB. Since we quickly discovered , the bellows did indeed produce enough
pressure to lift the closed pallets up, we decided to augment the weigth of
the pallets by glueing two 12 mm copper stops , one on each end of the pallet,
thus increasing the weigth with 22g to a total of 58g. The closing force now
becomes 0.57N, enough to keep them closed even at estimated maximum windpressure.
On suction air, this problem does not arrise, since the underpressure will
actually help the pallets to stay closed. In this case, the solenoid has to
bring up a force about twice as large as in the pression case, to lift the
pallets: 0.45N + 0.57N = 1.02N. The solenoids data sheet specifies a force
of 0.98N for a stroke of 15mm and a holding force (at stroke 0) of 11.8N.
With the velo-pulse (@25% duty cycle) applied, the force for a stroke of 15mm
becomes 1.96N.
- Solenoid power supply: toroidal transformer 225VA, sec.: 9V/10A, 15V/7.3A,
15V/1.6A. (3 separate windings) Note that the power supply capacity limits
the polyphony (and cluster size) to a maximum 22 notes.
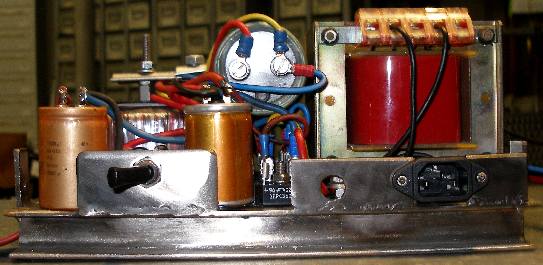
 The power supply
can be taken out as a separate module by loosening the two M4 bolts on the
sides of the instrument. Note that the mains power ground is connected to
the metal chassis of the instrument. If for any reason (ground loop avoidance)
this grounding has to be lifted, remove the M6 nut with the ground wire on
one of the mounting bolts of the Legrand transformer. This transformer is
rated 210 VA and has type number 42663. It's not a normally available type
-branded Legrand, France- but a component we removed from a broken industrial
piece of equipment. Sometimes recycling comes in handy...
The power supply
can be taken out as a separate module by loosening the two M4 bolts on the
sides of the instrument. Note that the mains power ground is connected to
the metal chassis of the instrument. If for any reason (ground loop avoidance)
this grounding has to be lifted, remove the M6 nut with the ground wire on
one of the mounting bolts of the Legrand transformer. This transformer is
rated 210 VA and has type number 42663. It's not a normally available type
-branded Legrand, France- but a component we removed from a broken industrial
piece of equipment. Sometimes recycling comes in handy...
- Pressure sensor circuit (using a Freescale MPXV7002DP sensing chip):
Circuit drawings for the midi hub board carrying the motor control PIC:
Part 1: Midi input and buffering:
Part 2: PIC-connections, power and power supply bypass:
Part 3: Motor control:
Part 4: Lights and options
Pulse- & Hold board circuit for the complete board (3 boards used).
Light bulbs used:
- Frontal halogen light 30 mm: Halogen 12 V/ 5 W (Osram) [midi note 10]
- Blue LED assembly under distance sensor (bottom): 4 ultra bright, 12 V/5
mA [midi note 11]
- Frontal left and right head lites: LED spot 12 V - blue or white, 50 mm
[midi notes 12, 13]
- Back-lites: LED spot 12 V - blue or white, 50 mm [midi notes 14,15]
- Upper part: 4 x E10 socket, 12 V/250 mA [midi 20-23]
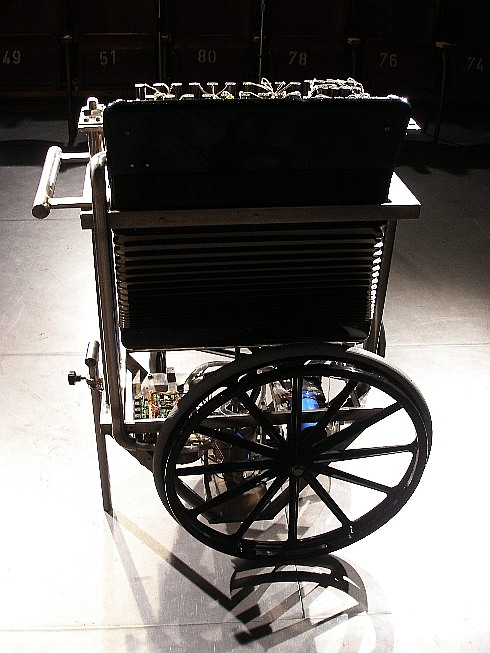
Backview picture: