<simba>, een nieuwe muziekrobot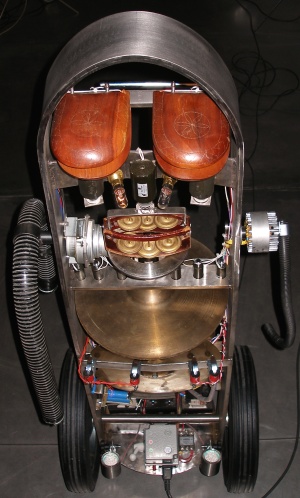 Deze automaat ontstond in eerste plaats op vraag van vele komponisten en medewerkers aan de uitbouw van ons robotorkest naar een automaat die in staat zou zijn cimbalen te bespelen. Daarbij implementeerden we zowel de 'suspended cymbal' -de op een statief geplaatste enkele cimbaal- als de 'hi-hat', waarbij de klank door konkussie van twee cimbalen ontstaat. De opgehangen cimbalen werden vertikaal gemonteerd, omdat dit de automatische bespeling iets eenvoudiger maakte. De cimbalen kunnen dan immers niet schommelen rond hun ophangpunt, zodat de afstand tussen de kloppertjes en het aanslagpunt konstant kon worden gehouden. Bovendien maakte deze opstelling het meteen mogelijk goede dempers op de cimbalen aan te brengen. Deze werden gevormd uit neopreen en pas gezet op de omtrek van de te dempen cimbaal. De aansturing gebeurt ook hier met een elektromagneet. De hi-hat werd konventioneel, horizontaal dus, uitgevoerd. Het mechanisme keerden we evenwel letterlijk ondersteboven: hier is het de onderste cimbaal die tegen de bovenste aangetrokken wordt. Ook hier weer heeft dit het voordeel van de konstante aanslagafstand voor de kloppertjes. Elke cimbaal werd voorzien van vier tot zes op verschillende plaatsen gemonteerde kloppertjes, zodat een genuanceerde bespeling via de aanslagmogelijkheden mogelijk is. Uiteraard is ook de aanslagsterkte voor elk kloppertje afzonderlijk perfekt goed aan te sturen. De aanslagsterkte werd gemapt op de midi velocity waarde en gebeurt technisch via pulsbreedte modulatie van de bekrachtigingsstroom. Enkele extra features werden aan de robot toegevoegd, ter versterking van het arsenaal aan klein slagwerk in het M&M robot orkest. Bovenop het instrument kwamen zo twee 'bas-kastagnetten', grote houten klappers, te zitten. Deze worden bewogen en tot klinken gebracht met twee Black Knight duw-elektromagneten. Hiervoor gebruikten we een zwaar type omdat hier het eigen gewicht van de klappers (4 Newton) zeker diende overwonnen te worden. Deze klappers klinken zo'n beetje als erg luide tegenelkaar geslagen kokosnoothelften. Daaronder werd een kleine schellentamboerijn gemonteerd, bediend door een gelijkaardige trekmagneet. Ook hier is de minimaal nodige trekkracht 3.5 Newton. Achteraan op het instrument, horizontaal gemonteerd, vonden we nog plaats voor een Ufip 'icebell'. Eigenlijk een uit gegoten brons gevormde en dan geslepen dikke bel-cimbaal. We hebben ze zelf nog in de Ufip fabriek bij Pistoia geselekteerd en uit Italie meegebracht... Deze cimbaal heeft slechts een enkele klopper. Aan de linker en rechterbuitenzijde van de robot tenslotte, monteerden we twee verschillende motoren: een eerste motor -een DC type met vertragingskast- wordt gebruikt om een shaker vervaardigd uit geribbelde metalen slang, rond te laten draaien. Het geluid houdt zowat het midden tussen dat van een reco-reco een een rainstick. De tweede motor daarentegen, is een topkwaliteit Papst 12-polige motor met uitwendig anker. Op deze motor monteerden we een eind PVC geribbelde PVC isolatieslang voor 3/4" elektrische leidingen. Dit geeft een zacht fluitend geluid. 
 Tot slot omvat <Simba> ook nog enkele vizuele 'features': aan de voorzijde, twee gele LED spotjes van eigen fabrikaat en twee klassieke bajonetlampjes onder de houten klappers. Aan de achterzijde: twee kleine E10 lampjes en een kleine halogeen spot gericht op de achterste cimbaal. Al deze vizuele komponenten zijn uiteraard ook volledig aanstuurbaar. Het chassis werd helemaal opgebouwd uit gelast inox AISI304L. De hoofdvorm werd geplooid uit een enkel stuk warmgewalst inox van 100mm x 2400mm bij een materiaaldikte van 10mm. Zoals bijna alle robots waaruit het M&M orkest is opgebouwd, werd ook <Simba> voorzien van een oerdegelijke wielbasis. Voor deze robot werd een driewielige konstruktie bedacht: twee grote wielen (400mm) en een wat kleiner draaiwiel voorzien van een degelijke inox stuurstang. De wielen lopen op kogellagers. Het draaiwiel werd verbonden met het hoofchassis middels een min of meer U-vormig gebogen stuk inox plat 50mm, eveneens 10mm materiaaldikte. De assen werden uitgevoerd in geslepen inox buis van 25mm. Doorheen deze assen kunnen M20 draadstangen worden gevoerd waarmee de automaat tijdens transporten in de kist kan vastgezet worden. In kombinatie met <Troms> beschikt het M&M orkest nu over een volwaardig automatisch drumstel. Gekombineerd met Thunderwood en Vacca of Vitello, is het zelfs een bijzonder uitgebreid drumstel geworden...



|