|
<Simba>
dr.Godfried-Willem RAES 2007 |
|
<Simba>
dr.Godfried-Willem RAES 2007 |
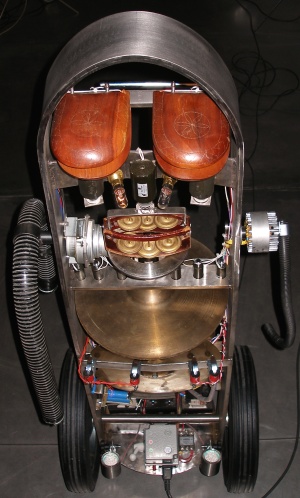
<Simba>
This robot was build in response to repeated questions and requests we had
from many of our collaborating composers working and writing for the Logos
robot orchestra, for automated cymbals with extended musical playing possibilities.
Only our <Troms> robot sofar had a small cymbal
with only a single beater. Its musical weigth was judged too light in the context
of the ever growing and pretty symphonic robot orchestra. In this newly designed
robot we wanted to implement both the suspended (stand-mount) cymbals, as the
hi-hat, where the sound comes from the concussion of two cymbals. Both elements
can be played with many different sticks, hitting the cymbals on different spots.
The hi-hat can also be played with the cymbals closed. Since the upper cymbal
is not moving, the striking distance for the solenoids remains constant, which
is essential for the realisation of predictable velocity scalings in such an
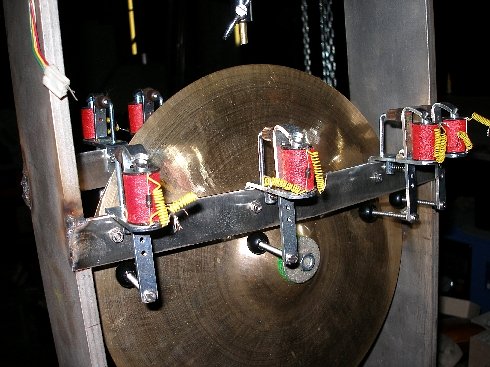
instrument. As to the suspended cymbals, instead of mounting them horizontaly
as usual amongst percussionists, we went for a vertical placement, since that
facilitated the mounting of the different striking mechanisms. Also, it made
it possible to provide in a good working damping mechanism for each individual
cymbal. We did a lot of research into this one, and finally came up with the
design implemented here whereby the cymbals are damped with a piece of felt
covered neoprene touching the cymbal on the edge over about 1/6th of the diameter
of the cymbal. Also these cymbals can be struck whilst damped, thus allowing
for a typical dry sound effect.
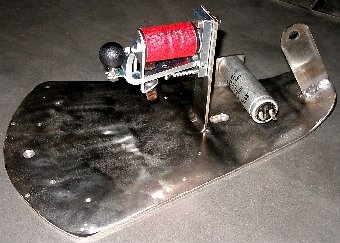
Some extra features added to this robot are: A small but heavy cast bronze bell
cymbal (made by Ufip and sold as 'ice bell') with a single beater. A couple
of bass castanets (large wooden clappers, sounding a bit like loud coconuts),
driven by strong push type solenoids; a bell-rim tambourine without drumskin
driven by a pull-type solenoid. As yet under consideration are a motor driven
rainmaker (rainstick), motor driven musical tubes, tubular shakers, a reco reco,
a cavity resonator tube...
Some visual features have been added as well: a variety of lights, mapped on
midi notes. Four lites are mounted on the front, three on the back.
The entire chassis construction was made from stainless steel AISI304L. The
parts were welded together using the manual TIG process. The chassis main frame
was bend from a piece of stainless steel 2400mm x 100mm x 10mm and provides
more than enough structural strength to withstand abuse in transportation and
heavy use. The <Simba> robot has three sturdy wheels: two 400mm diameter
frontal wheels and a 200mm steering wheel on the back. The horizontal movement
is equiped with ball bearings.
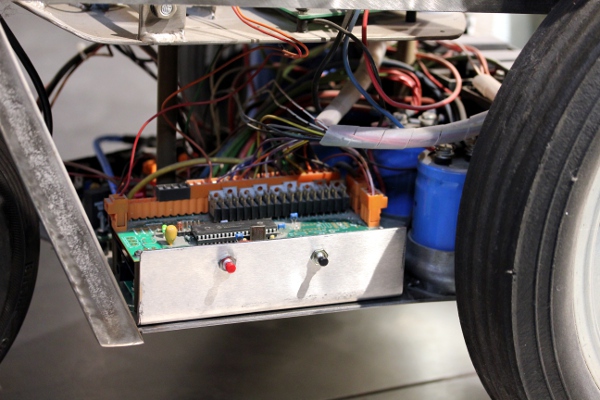
Circuitry:
The circuitry of <Simba> consists of three processor boards, each equiped
with a PIC microprocessor. The midi in and buffer circuit on the first processor
board is very straigthforward and makes use of the same circuit board used in
robots such as <Thunderwood>, <Vitello> and <Qt>.
The circuit for the PIC processor on this board is similar to that used for
<Bako> and <Vitello>.
It has two PWM outputs for analog control using PWM, one used for the Hitachi
DC-motor, as well as 6 mosfet switches used for lights and on/off power switches
(mapped on midi controller 66) in this robot.
The second board uses a 18F4620 PIC microprocessor and has 28 mosfet switches
used to drive the solenoids and beater electromagnets. The same board was also
used for <Xy>, our quartertone xylophone playing robot. Pulse resolution
is ca. 27micro seconds. Pulse power supply is +50V. For detailed circuit drawing:
see maintenance manual at the very end of this web page.

The third PIC-microcontroller board, is a board as developped for our player piano. It provides velocity controlled attacks as well as a hold voltage after the pulse. This board was used to steer the hi-hat solenoid as well as the cymbal dampers. We used an old board with 10 outputs and a 18F2525 controller, since we had some on the shelve (left over from <Harma>). Note that the latest version has 14 outputs (10.2006), and uses the 18F4620. The power supply here uses the bipolar voltages +17V and -17V.
The power supply originally designed in was a Siemens Sitop SMPS type, featuring adjustable output voltage up to 52Volts. We adjusted it to 48V, four times the nominal working voltage for the solenoids, for this automate. However we had to change this and replace it with a traditional analog power supply, for the Sitop was unable to cope with the pretty hefty pulse current surges required to drive the solenoids in this design.(up to 6A) Hence we reverted to a classical analog and unstabilised supply with very hefty buffer capacitors. Note that the robot is not fused! In the context of the M&M robot orchestra, we power the entire orchestra from a special 3kW separation transformer (400V/230V) which has its own fuses, thus respecting all rules regarding electrical safety. The entire orchestra is floating with respect to real earth. The only component that could cause earth leaks in this robot, is the 2uF bipolar capacitor used in the Papst motor circuit.
Midi Mapping:

Details with regard to the selection, disposition and mapping of beaters:
| Midi note |
beater order |
cimbal specs.. (sizes in mm) | maximum repeat frequency | optimum velocity | remarks |
| 58 | Hitachi DC motor | tube-shaker or whirlee tube | 40 (max.120) | on / off (velo=speed) PIC1, pin 13 - X17-2 white/red,white/black | |
| 59 | Papst AC motor | flexible tubing | 1Hz | 127 | on / off PIC1 - pin12 - X17-3 |
| 60 | edge beater, right | front cymbal, 300mm | 36Hz | pulse only [PIC2]-28-black | |
| 61 | edge beater, left | front cymbal | pulse only [PIC2]-27- brown | ||
| 62 | mid beater, right | front cymbal | pulse only [PIC2]-26 - white/red | ||
| 63 | center beater, left | front cymbal | pulse only [PIC2]-25 - orange | ||
| 64 | damper | front cymbal damper | 2Hz | note on + velo/ note off [PIC3] | |
| 65 | edge beater 1, right | hi hat cymbal | pulse only [PIC2]-24 - yellow | ||
| 66 | edge beater 2, left | hi hat cymbal | pulse only [PIC2]-23 - brown | ||
| 67 | medium beater 1,left | hi hat cymbal | pulse only [PIC2]-22 - green | ||
| 68 | medium beater 2,right | hi hat cymbal | pulse only [PIC2]-21 - purple | ||
| 69 | center beater 1, left | hi hat cymbal | pulse only [PIC2]-20 - grey | ||
| 70 | center beater 2, right | hi hat cymbal | pulse only [PIC2]-19 - white | ||
| 71 | hi hat | cymbal close magnet | 4Hz | on + velo/ off [PIC3] | |
| 72 | edge beater, right | back cymbal | pulse only [PIC2]- 18 - black | ||
| 73 | edge beater, left | back cymbal | pulse only [PIC2]- 17 - yellow | ||
| 74 | mid beater, left | back cymbal | pulse only [PIC2] - 16 - purple | ||
| 75 | center beater, right | back cymbal | pulse only [PIC2] - 15 - orange | ||
| 76 | damper | back cymbal damper | 2Hz | on+velo / off [PIC3] | |
| 77 | tambourine | 4Hz |
pulse only [PIC2] - 14 - blue |
||
| 78 | left clapper | 6Hz |
pulse only [PIC2] - 13 - grey |
||
| 79 | right clapper | 6Hz |
pulse only [PIC2] - 12 - purple |
||
| 80 | bell cymbal beater | Ufip 'Ice bell' | 12Hz | pulse only [PIC2] - 11 - | |
| 81 | bell cymbal damper | damper | on+velo / off [PIC3] | ||
| 82-90 | for later expansion | - | - | - | [PIC2]- pulse |
| 91-96 | for later expansion | - | - | - | [PIC3]- pulse + hold |
| 110 | 24V bulb - white, right | mounted below castanets |
on / off [PIC1] - white/white wires - X11-2 |
||
| 111 | 24V bulb - white, left | mounted below castanets |
on / off [PIC1] - black/black wires - X11-3 |
||
| 112 | 35V/50mA bulbs | on insert chassis with ice bell |
on / off [PIC1] - green/ pink - X12-2 |
||
| 113 | 24V/10W spotlite | on the back |
on / off [PIC1] - black/blue/brown - X12-3 |
||
| 114 | LED spotlites 12V | on the front |
on / off [PIC1] - brown - X15-2 |
||
| Controllers | |||||
| 66 | on/off switch for power | PIC1 - X15-3 | |||
| 123 | all notes off | PIC1 / PIC2 / PIC3 | |||
| Prog.Change | |||||
| 0 | default velo mapping table | PIC2 / PIC3 | |||
| 122-127 | user defined tables | PIC2 / PIC3 - pin code for sysex: simb |
Technical specifications:
Pictures taken during construction:








<Simba> demo composition: Bradt 'Je brule de partout' [MP3] Source code: [Midi file for this composition]
| Back to Logos-Projects page : projects.html | Back to Main Logos page:index.html | To Godfried-Willem Raes personal homepage... | To Instrument catalogue |  |
<Simba>
Deze automaat ontstond in eerste plaats op vraag van vele komponisten en medewerkers aan de uitbouw van ons robotorkest naar een automaat die in staat zou zijn cimbalen te bespelen. Daarbij implementeerden we zowel de 'suspended cymbal' -de op een statief geplaatste enkele cimbaal- als de 'hi-hat', waarbij de klank door konkussie van twee cimbalen ontstaat. De opgehangen cimbalen werden vertikaal gemonteerd, omdat dit de automatische bespeling iets eenvoudiger maakte. De cimbalen kunnen dan immers niet schommelen rond hun ophangpunt, zodat de afstand tussen de kloppertjes en het aanslagpunt konstant kon worden gehouden. Bovendien maakte deze opstelling het meteen mogelijk goede dempers op de cimbalen aan te brengen. Deze werden gevormd uit neopreen en pas gezet op de omtrek van de te dempen cimbaal. De aansturing gebeurt ook hier met een elektromagneet. De hi-hat werd konventioneel, horizontaal dus, uitgevoerd. Het mechanisme keerden we evenwel letterlijk ondersteboven: hier is het de onderste cimbaal die tegen de bovenste aangetrokken wordt. Ook hier weer heeft dit het voordeel van de konstante aanslagafstand voor de kloppertjes. Elke cimbaal werd voorzien van vier tot zes op verschillende plaatsen gemonteerde kloppertjes, zodat een genuanceerde bespeling via de aanslagmogelijkheden mogelijk is. Uiteraard is ook de aanslagsterkte voor elk kloppertje afzonderlijk perfekt goed aan te sturen. De aanslagsterkte werd gemapt op de midi velocity waarde en gebeurt technisch via pulsbreedte modulatie van de bekrachtigingsstroom.
Enkele extra features werden aan de robot toegevoegd, ter versterking van het arsenaal aan klein slagwerk in het M&M robot orkest. Bovenop het instrument kwamen zo twee 'bas-kastagnetten', grote houten klappers, te zitten. Deze worden bewogen en tot klinken gebracht met twee Black Knight duw-elektromagneten. Hiervoor gebruikten we een zwaar type omdat hier het eigen gewicht van de klappers (4 Newton) zeker diende overwonnen te worden. Deze klappers klinken zo'n beetje als erg luide tegenelkaar geslagen kokosnoothelften. Daaronder werd een kleine schellentamboerijn gemonteerd, bediend door een gelijkaardige trekmagneet. Ook hier is de minimaal nodige trekkracht 3.5 Newton. Achteraan op het instrument, horizontaal gemonteerd, vonden we nog plaats voor een Ufip 'icebell'. Eigenlijk een uit gegoten brons gevormde en dan geslepen dikke bel-cimbaal. We hebben ze zelf nog in de Ufip fabriek bij Pistoia geselekteerd en uit Italie meegebracht... Deze cimbaal heeft slechts een enkele klopper. Aan de linker en rechterbuitenzijde van de robot tenslotte, monteerden we twee verschillende motoren: een eerste motor -een DC type met vertragingskast- wordt gebruikt om een shaker vervaardigd uit geribbelde metalen slang, rond te laten draaien. Het geluid houdt zowat het midden tussen dat van een reco-reco een een rainstick. De tweede motor daareentegen, is een topkwaliteit Papst 12-polige motor met uitwendig anker. Op deze motor monteerden we een eind PVC geribbelde PVC isolatieslang voor 3/4" elektrische leidingen. Dit geeft een zacht fluitend geluid.
Tot slot omvat <Simba> ook nog enkele vizuele 'features': aan de voorzijde, twee gele LED spotjes van eigen fabrikaat en twee klassieke bajonetlampjes onder de houten klappers. Aan de achterzijde: twee kleine E10 lampjes en een kleine halogeen spot gericht op de achterste cimbaal. Al deze vizuele komponenten zijn uiteraard ook volledig aanstuurbaar.
De <Simba> robot wordt intern bestuurd door drie PIC mikrokontrollers: twee 18F2525 types waarvan een voor de pulse/hold funkties (cimbaaldempers en hihat) , en een tweede voor het midi kommunikatiesysteem, de lampjes en motoren, en de inschakelbeveiliging. Een derde mikrokontroller is van het grotere 18F4620 type en wordt ingezet voor de puls besturing van de klopperjes.
Het chassis werd helemaal opgebouwd uit gelast inox AISI304L. De hoofdvorm werd geplooid uit een enkel stuk warmgewalst inox van 100 mm x 2400 mm bij een materiaaldikte van 10 mm. Zoals bijna alle robots waaruit het M&M orkest is opgebouwd, werd ook <Simba> voorzien van een oerdegelijke wielbasis. Voor deze robot werd een driewielige konstruktie bedacht: twee grote wielen (400 mm) en een wat kleiner draaiwiel voorzien van een degelijke inox stuurstang. De wielen lopen op kogellagers. Het draaiwiel werd verbonden met het hoofchassis middels een min of meer U-vormig gebogen stuk inox plat 50mm, eveneens 10mm materiaaldikte. De assen werden uitgevoerd in geslepen inox buis van 25 mm. Doorheen deze assen kunnen M20 draadstangen worden gevoerd waarmee de automaat tijdens transporten in de kist kan vastgezet worden.
In kombinatie met <Troms> beschikt het Logos Robot Orkest nu over een volwaardig automatisch drumstel. Gekombineerd met Thunderwood en Vacca of Vitello, is het zelfs een bijzonder uitgebreid drumstel geworden...Midi Mapping:
Specifieke komposities voor <Simba>:
Bouwdagboek:
 Aan
de rechterkant komt een Papst aussenlaufer motor, met de rotor aan de buitenzijde.
Deze motor loopt op 50Hz met moet via een 2µF AC kondensator van een
tweede faze voorzien worden. Indien we dit niet werkend zouden krijgen, meteen
ook gaten geboord voor een Truvox britse bandopnemermotor uit de jaren '50
van vorige eeuw. Onze voorkeur voor dit soort motoren vind zijn oorsprong
in de extreem geruisloze werking ervan. Eerste voorstelling van het simba
projekt aan Johannes Taelman. Bespreking PIC implementatie.
Uitfrezen van de verzonken montagegaten (20mm/14mm) voor de elektromagneten
voor de cimbaalbespeling. Bestelling nieuwe fles Argon op 300Bar.
Aan
de rechterkant komt een Papst aussenlaufer motor, met de rotor aan de buitenzijde.
Deze motor loopt op 50Hz met moet via een 2µF AC kondensator van een
tweede faze voorzien worden. Indien we dit niet werkend zouden krijgen, meteen
ook gaten geboord voor een Truvox britse bandopnemermotor uit de jaren '50
van vorige eeuw. Onze voorkeur voor dit soort motoren vind zijn oorsprong
in de extreem geruisloze werking ervan. Eerste voorstelling van het simba
projekt aan Johannes Taelman. Bespreking PIC implementatie.
Uitfrezen van de verzonken montagegaten (20mm/14mm) voor de elektromagneten
voor de cimbaalbespeling. Bestelling nieuwe fles Argon op 300Bar.
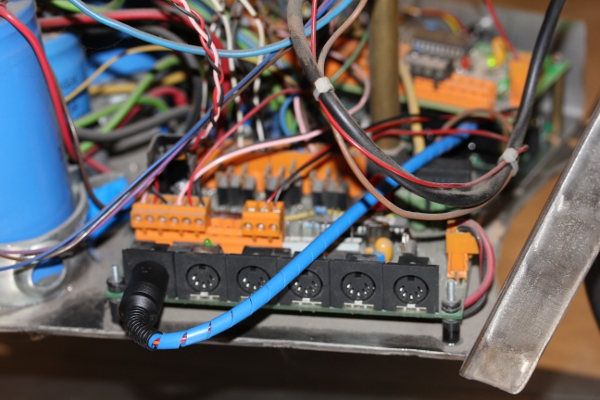 Op de foto: omleiding van de midi-in naar het Axo board, nodig voor autonome
werking. De kode in de Axo werd ontwikkeld door onze medewerkster Lara Vanwynsberghe.
Op de foto: omleiding van de midi-in naar het Axo board, nodig voor autonome
werking. De kode in de Axo werd ontwikkeld door onze medewerkster Lara Vanwynsberghe. De
aansluitingen op het Axoloti board zien eruit alsvolgt:
De
aansluitingen op het Axoloti board zien eruit alsvolgt:
|
|
Terug naar Logos' index-pagina: | Godfried-Willem Raes personal homepage... | Naar katalogus instrumenten | |
Last update: 2021-05-31 by Godfried-Willem Raes
Servicing and spare parts information:
<Simba>:
Diagnostics:
Analog power supply, using three traditional 300VA transformers and large capacitors.
Note that the 5V logic power supply uses a small module and is always switched
on if the instrument is connected to the mains voltage. This SMPS module is
mounted inside the mains switch box.
PC-boards:
Cymbals:
Solenoid data:
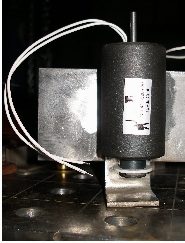
Hi-hat beater solenoids: Six linear tubular solenoids, push type, diameter 20mm. Two types/brands can be used:
A return spring was added inside the solenoid. Note that both brands use a different thread for mounting! Note that the solenoids must fall into the 20mm diameter hole in the 10mm thick mounting bracked for proper adjustment. These solenoids are driven with 50V pulses. During the pulse the current is 2.5A (Black Knight) or 3.9A (Lukas Ledex / Saia Burgess)
Solenoid used for the hi-hat mechanism (pull-type), the tambourine bells (pull-type)
, and the bass castanets (push type): Black Knight, type 124-420-620-620, 12V
dc @ 100% - R DC= 8.2 Ohm. So the current during the velo-pulse time at 50V
is 6A. The solenoid used to lift the hi-hat cymbal is operated on a lower voltage,
since it must be allowable to keep the hi-hat in a fully closed position.
Beaters for the suspended cymbals: August Laukhuff, pallet solenoids, 12/14V, with return spring. R DC= 80 Ohm
Damper solenoids for the suspended cymbals: August Laukhuff, trakturmagnet, .Order type 300810. Nominal voltage (100% duty cycle): 24V, 410mA. Resistance: 59 Ohm. Force: 10N. Displacement: 10mm.
Solenoid for the bell cymbal: August Laukhuff, 12/14V
Motor Data:
1.- Papst motor type: KLZ20.50-4-540D/T, 220V 50Hz. Year of construction 1969 (11.06). 12-poles. Original destination: reel to reel professional taperecorders. Normally operated with a 2µF AC capacitor. Operation as delta wired 3-phase motor is perfectly possible.
2.- Hitachi motor type: FLMG-08A-02-E, 24V DC, 10W. Part number P/N: AX020010 50P/A MFG No. J86.
Robodies pictures with <Simba>: