Flex 2002

Collectie Stichting Logos
Titel Flex
Productie Gebouwd te Gent door Godfried-Willem Raes met de medewerking van Moniek Darge, Kristof Lauwers, Leonaar Degraeve, Bert Vandekerkhove, Johannes Taelman en Mattias Parent
Datering 2002
Afmetingen
H x B x L: 150 cm x 60 cm x 160 cm
Gewicht: ca 136 kg
Classificatie 511
Inventarisnummer LOGOS2002.04
Beschrijving van het instrument
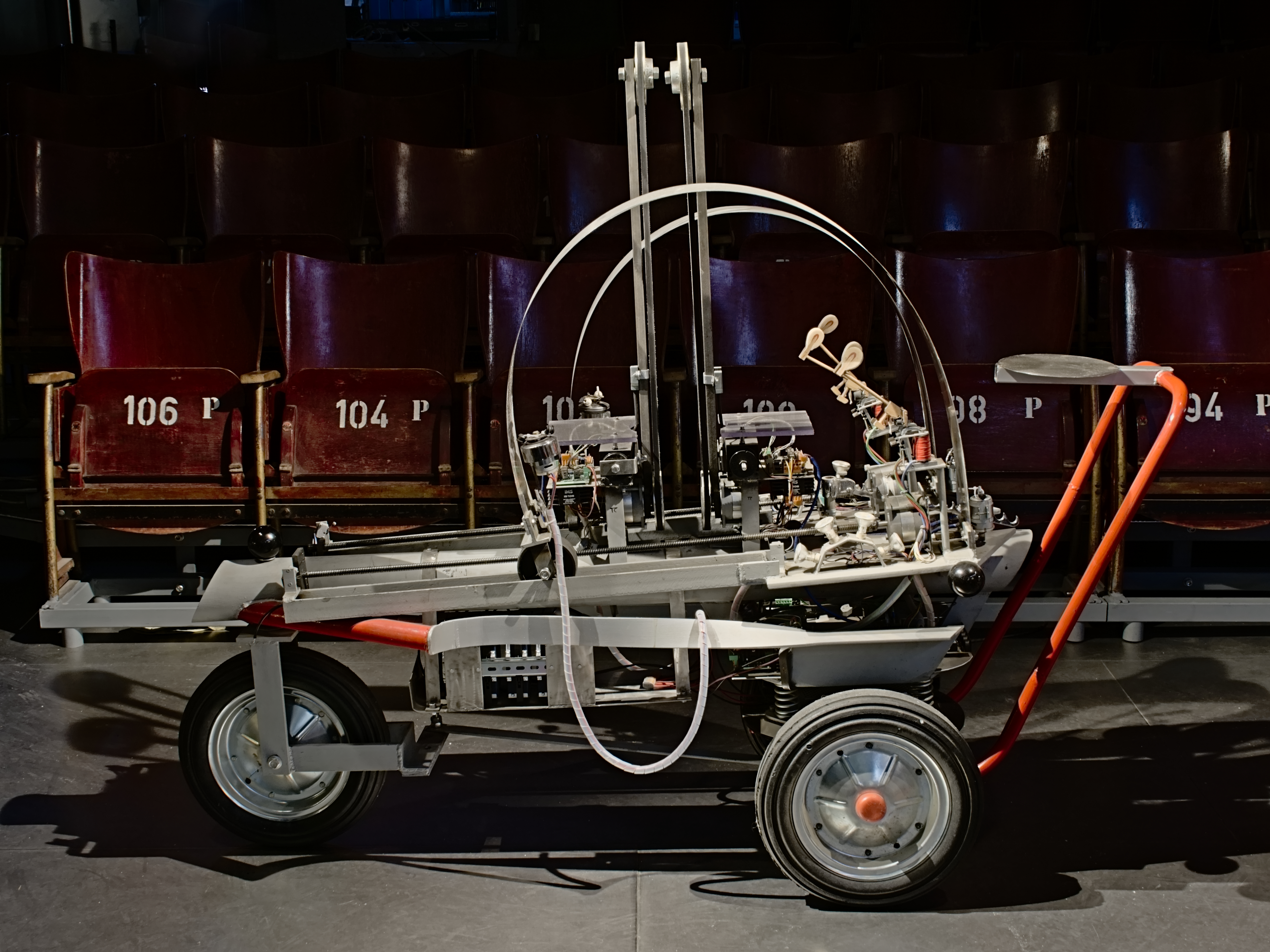
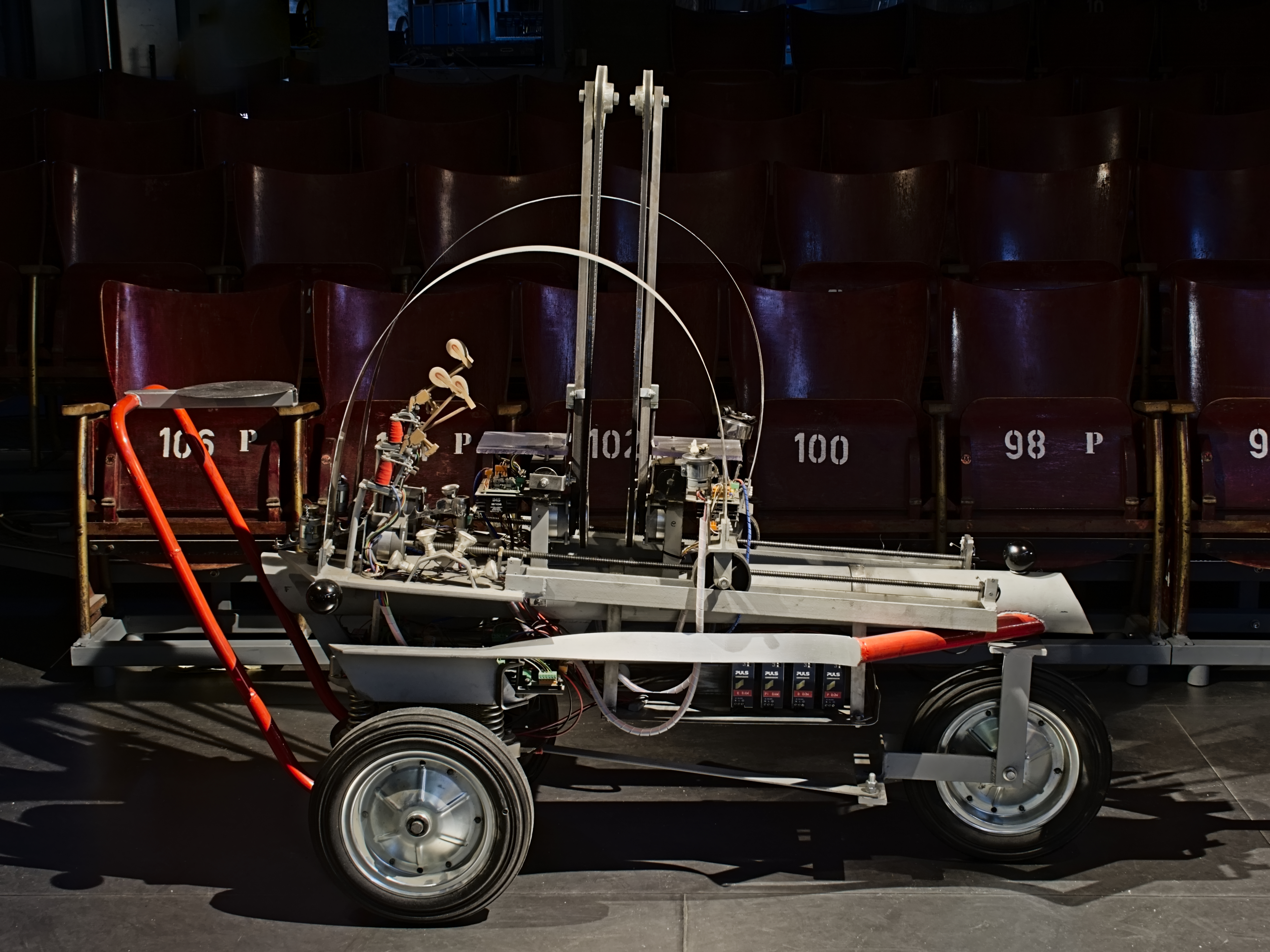
Flex is gebouwd op een stalen constructie met drie wielen. De twee draaiende wielen op dezelfde as waaraan de stuurstang hangt, zijn met een kruisdissel met het enkel draaiend wiel verbonden. Bovenaan de stuurstang zien we een rond metalen plateautje. Een grote horizontale ijzeren buis is met een verend mechanisme met de wielbasis verbonden. Boven de buis zien we aan beide kanten de twee gebogen klankbladen (of zaagbladen) uit gehard roestvrij staal. De bladen hebben een verschillende lengte en verhouden zich tot elkaar als de wiskundige getallen Pi en E. De bladen zijn aan één kant met vijzen gefixeerd, terwijl de andere kant aan een wiel is vastgemaakt. Dat wiel kan met behulp van stappenmotoren en een trapeziumspiraal in een soort van goot heen en weer bewogen worden. Hierdoor worden de bladen verbogen, waardoor hun resonantiefrequentie wijzigt. Dit heeft directe invloed op de toonhoogte van de zaagbladen.
De bladen kunnen worden bespeeld met kloppertjes en/of met een strijkmechanisme. Elk zaagblad heeft vier klopmechanismen, namelijk twee pianohamers en twee elektromotortjes waaraan kogeltjes hangen.
De pianohamers die zich aan de binnenkant nabij het gefixeerde gedeelte van het blad bevinden, worden met een elektromagneet tegen het blad geslagen. De DC-motortjes bevinden zich aan het uiteinde van elk zaagblad. Met een touwtje zijn telkens twee kogeltjes met de as van het motortje verbonden. Bij het draaien van de motor worden deze tegen het zaagblad geslingerd. Zowel de slagkracht van de hamertjes als de snelheid van de motortjes kan met midicommando´s worden bepaald.
Het strijkmechanisme bevind zich tussen de twee zaagbladen. Een rubberen band waarop colofaan is aangebracht ligt rond twee wielen die op een stang zijn gemonteerd. Één van de wielen is met een stappenmotor verbonden waarvan de snelheid en richting softwarematig kan worden bepaald. Door het draaien van de motor kan het wiel tegen de bladen worden gestreken. De stang tussen de wielen hangt aan een bidirektionele elektromagneet. Deze bepaalt hoe hard en tegen welk blad het strijkmechanisme wordt geduwd. De positie wordt mee geregeld door een sensor die op de stang is gemonteerd. Merk op dat beide strijkmechanismes hetzelfde zaagblad kunnen bespelen.
Flex wordt bestuurd met vijf PIC microchips (type 18F2525): twee voor de volledige besturing van het strijkmechanisme, twee voor de stappenmotors die de bladen buigen en één voor de kloppers en lichtjes.
De printplaten met het besturingssysteem zijn op een horizontale plaat tussen de wielen vastgemaakt. daar bevinden zich ook de midihub, de schakelaar, de voeding en de voedingsconnector. De motorcontrollers van de stappenmotoren bevinden zich ter hoogte van het enkele wiel. Ook de lichten van Flex die Raes toevoegde zijn midi gestuurd.
Alle elektrische schema’s en firmware vind je in het bouwdagboek van Flex.
Speelwijze, repertoire en inzet in producties
Flex maakt deel uit van het Logos Robotorkest, dat voordien m&m-ensemble werd genoemd. Omwille van zijn onvoorspelbare aard wordt de robot slechts zelden gebruikt in orkestraties en stukken die specifiek geschreven zijn voor het orkest.
Volgende composities zijn specifiek voor Flex geschreven:
- “Flexes”, Godfried-Willem Raes (2002)
- “Flexing haram”, Godfried-Willem Raes (2016)
- “Noli me tangere”, Godfried-Willem Raes (2020)
Opbouw van het instrument/installatie
De midi-ingang (tussen de achterwielen) moet met behulp van een midikabel met het midi-interface worden verbonden. Het midi-interface is op een computer aangesloten. De stroomkabel moet in de daarvoor voorziene fiche (tussen de achterwielen) worden gestoken en de schakelaar ernaast moet worden ingeschakeld.
Manual: zie bouwdagboek en de gids voor componisten.
Inscripties
/
Staat van het instrument
In werkende staat
Historiek van het instrument
De zeer experimentele aard van het instrument en de moeilijke klankopwekkingmechanismes zorgen er voor dat Flex reeds een hele evolutie heeft doorgemaakt waarin Raes steeds naar verbeteringen op zoek ging.
De eerste versie van Flex (2002) maakte gebruik van 8 Microchips van Basic Stamps en werd met een laptop via een parallelle printerpoort aangestuurd. Het plateautje bovenaan de stuurstang diende als steun voor de laptop. De positie van de zaagbladen werd bepaald met microswitch sensoren. Flex werd aanvankelijk met behulp van accu´s van stroom voorzien.
In 2004 werd de wielbasis licht aangepast en kreeg de robot nieuwe zaagbladen. Er werd geëxperimenteerd met de besturing van de stappenmotoren.
In 2016 werd het volledige besturingssysteem vervangen. Er werd gebruik gemaakt van vijf Microchip 18F2525 microcontrollers. De robot werd voortaan rechtstreeks met het midiprotocol aangestuurd. Het strijkmechanisme werd aangepast (bidirectionele elektromagneten en nieuwe sensoren (Pepperl+Fuchs) voor de positiebepaling) en de kloppertjes met dc-motor werden toegevoegd. De nieuwe onderdelen (zoals bijvoorbeeld het chassis voor het besturingssysteem, de houders voor de nieuwe kloppertjes,…) werden allemaal gemaakt uit roestvrij staal.
Problematieken
Ook na de revisie van 2016 is de klank van Flex moeilijk eenduidig vast te leggen door de componist. In die zin is Flex een onvoorspelbare machine.
Media
Afbeeldingen
{kind=link}
{kind=link}
Audio
Flexes, Godfried-Willem Raes