.
Linear Motor Robots
preliminary research on very large rasps
<Reco-Reco> robots project
In 2003 wisten we vier lineaire motoren gebouwd door Trilogy -type Ironless 210-2 op de kop te tikken. Konkrete plannen voor toepassingen hadden we niet direkt, maar de spullen leken ons ongemeen interessant. De fabrikant, Trilogy, werd in 2003 overgenomen door Parker en deze motoren bleven ook na de overname in de produktielijn zitten.
Fascinerend vonden we ook de wetenschap dat dergelijke motoren ook worden gebruikt voor de aandrijving van supersnelle zweeftreinen in Japan en China. De interne opbouw ziet eruit alsvolgt:
De 'rotor' is helemaal ijzerloos en bevat de driefazige koperen wikkelingen. Het vaste deel heeft de sterke om-en-om gepoolde permanente magneten. De elektrische gegevens -ontnomen aan het datablad van de fabrikant- zijn:
- I-peak =11.8 A
- I-cont = 2.6 A sine, (1.8 A rms)
- Force = 21.8 N/A
- Back EMF = 25.2 V/m/s
- Rdc =11.8 Ohm (per faze)
- L = 4.8 mH
- Motor constant: 6.45 N / W
- P = 79 W
- Lengte voor 1 periode: 60.96 mm
- Lengte slede: 142.2 mm
De spoelen zijn in driehoek geschakeld.
Mogelijke toepassingen met relevantie voor muzikale robotica leken ons te zijn:
- lineaire beweging van strijkstokmechanismen
- lineaire beweging van balgen zoals in accordeons
- bouw van automatische schuiftrombones
- bespeling van de toets van snaarinstrumenten, met bijzondere mogelijkheden voor glissando
- automatisering van schuiffluiten
- reusachtige donderblikken
- konkussie instrumenten: orkest cimbalen
- lange guiro's, reco-reco's of gelijkaardige raspen:
Raspen leken ons wel een interessant onderzoeksdomein. De 'toonhoogte' hangt af van de snelheid waarmee met het stokje over de rasp wordt bewogen. Het spektrum is dan weer een funktie van de vorm van de kuiltjes en de regelmaat van de inkervingen. De 'getrouwheid' hangt af van de diameter van het stokje. De geluidsterkte is afhankelijk van de kracht waarmee het stokje op de rasp wordt geduwd. Uiteindelijk is de registratie van geluid op een grammafoonplaat en een oude Edison cilinder niet fundamenteel verschillend van de werking van een rasp. Het stokje komt naar werking overeen met de naald van zo'n oude krassenlezer.... Om zoiets goed te kunnen bouwen bleek het wezenlijk dat het hele bewegend deel een zo klein mogelijke massa zou moeten hebben. De beweeglijkheid moet immers erg groot zijn en dus de inertie gering. De 'rotoren' van de lineaire motoren (een slede ware eigenlijk een betere benaming) bevatten magneten noch ijzer, maar slechts een dubbele in serie geschakelde driefazige wikkeling, waardoor aan de voorwaarden vrij behoorlijk kon worden voldaan. Een periode van de besturing komt overeen met een verplaatsing van de slede van 60.96 mm.
Voor de besturing van de motoren, gebruikten we in onze eerste reeks experimenten Anaheim MDC151 stuurmodules hoewel die niet specifiek geschikt zijn voor de besturing van lineaire motoren maar wel voor BLDC motoren uitgerust met hal-sensoren. . .c
Voor de voeding moet de spanning minimaal 30V zijn terwijl de stroom bij normaal kontinu bedrijf beperkt blijft tot maximaal 2.6A. Het kontinu vermogen is 79 Watt, maar het piekvermogen kan -volgens het datablad- tot 1,58kW oplopen (bij een piek-stroom van 11,8 A). De kracht die de motor bij normaal bedrijf opbrengt is 57,4 N terwijl die kracht een piekwaarde kan bereiken van 255,8 Na verschillende weken experimenteren bleken we onze motoren niet goed aan de praat te krijgen. Na diepgaande research bleek dat motor controllers die werken met een trapezoidale aansturing van de wikkelingen totaal ongeschikt zijn voor de traaglopende lineaire motoren. De Anaheim controllers bleken dus totaal ongeschikt. Hun datablad maakt evenwel geen melding van de wijze van aansturing. Een aansturing met driefazige sinusvormige spanningen bleek dus essentieel. In het ideaal geval zouden de motoren moeten uitgerust zijn met analoge hall-sensoren. Dit is hier echter niet het geval: de hall sensoren op onze Trilogy's werken zuiver digitaal.
Een lange zoektocht naar geschikte controllers voor sinusoidale aansturing van BLDC motoren leverde geschikte types op gefabriceerd door Faulhaber (bvb. type MC5004P) ofwel een Chinees fabrikaat ACT Motor, type BLDC-8015A, verkrijgbaar bij het Duitse elektronikabedrijf Reichelt.
Tot onze grote opluchting bleken deze -bovendien vrij goedkope- controllers het zowat onmiddellijk te doen op ons testexemplaar. Trage snelheden bleken evenwel in eerste instantie onhaalbaar.
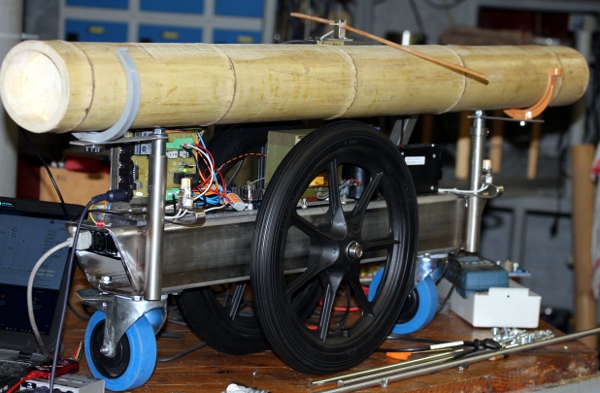
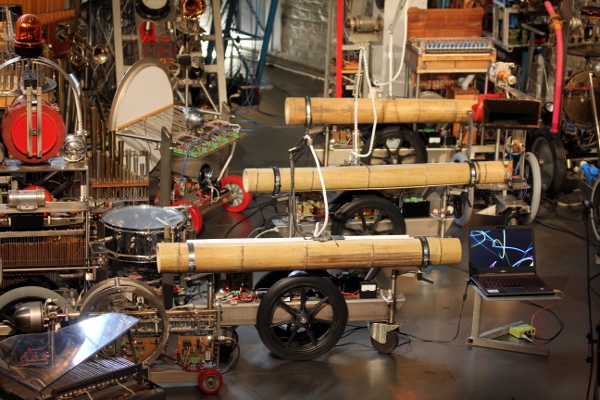
Na lang beraad over de meest geschikte toepassing voor deze motoren, beslisten we inderdaad te gaan voor lange raspen. De idee was te gaan voor de bouw van vier nagenoeg identieke rasp-robots die alleen zouden verschillen in de bouw en de klank van de rasp in elk exemplaar. Bovendien wilden we de mogelijkheid open houden, om het monteren van heel diverse raspen op de robots mogelijk te maken. We gingen meteen aan de slag met het bouwen van vier raspen in bamboe met een grote diameter.
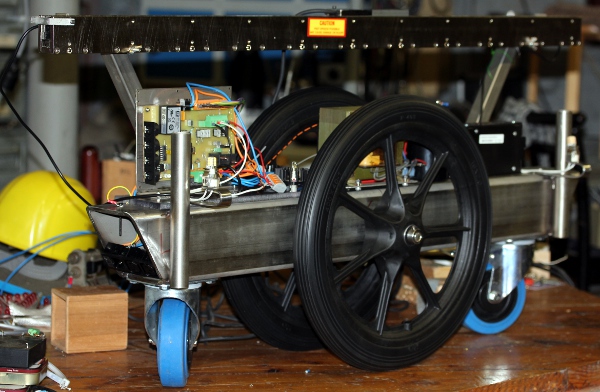
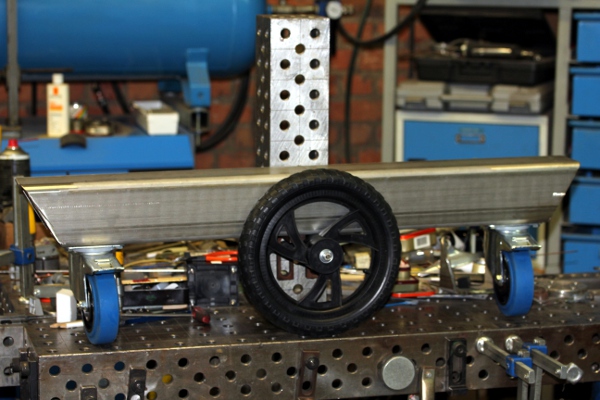
Zoals al onze eerder gebouwde robots, wilden we ook deze robots bouwen op een stevig gelast en van wielen voorzien onderstel. Omwille van de wendbaarheid opteerden we hier voor een ontwerp met vier wielen opgesteld in ruitvorm. Onze eerste proeven voerden we uit gebruik makend van een reusachtige guiro die we in 1995 ooit bouwden in opdracht van Mauricio Kagel die toen bij ons te gast was. Kagel was er bijzonder gelukkig mee trouwens. Die guiro gemaakt uit bamboe, was 138 cm lang.
Hoewel in oorsprong een exotisch instrument, vooral veel voorkomend in Latijns-Amerika, komt het ook voor in een aantal heel beroemde werken uit de westerse klassieke muziek: Zo schreef Igor Stravinsky het voor in 'Le Sacre du Printemps' en staat het ook voorgeschreven in Maurice Ravel's 'L'enfant et les sortileges'. Ook het zelfs bij ons in de volksmuziek bekende wasbord behoort tot de organologische familie van de raspen.
Technische gegevens:
Midi implementatie - Midi implementation:
Elke rasp luistert naar twee diatonische noten. De eerste beweegt het stokje op de rasp initieel naar rechts, en tweede doet het stokje initieel naar links bewegen. Het velocity byte stuurt in beide gevallen de snelheid van de motor. Het trajekt wordt bepaald door de duur van de noot. Wanneer het einde van de rasp wordt bereikt keert de bewegingsrichting automatisch om. De beweging wordt gestopt bij ontvangst van een note-off kommando.t. Note-off kommando's worden altijd uitgevoerd met een kort remtrajekt (50 ms). Tijdens deze rem-tijd zal de rasp niet reageren op nieuwe note-on kommando's. Tijdens de beweging van de rasp kan de bewegingssnelheid gemoduleerd worden met het key-pressure kommando.
Controllers:
Controller #7: controls the loudness by steering the force wherewith the stick rides over the guiro. This controller affects all guiro's. For individual controlls, use #27, #37, #47
Controller #8: controls the loudness of the resonator pulses. For individual controlls, use #28, #38, #48. The click noise is disabled when this controller is sent with value zero. If set to any value higher than zero, the rate of the clicks is proportional to the movement speed. For every motor 'revolution' we have 3 clicks. A motor 'revolution' or period corresponds to a travel length of 60.96 mm. The full motor traject gives 45 pulses. Hence, a single pulse is generated for every displacement of 20.32 mm. These controllers must be ON in order to make the resonator work. Default value for these controllers = OFF.
Controller #16: controls the attack time (acceleration) for note-on's, for all guiro's. Range 0 - 506ms. Default setting = 6, giving an acceleration time of 100 ms.
Controllers #27, #37, #47: controls the stick pressure -and thus the loudness- for each individual guiro, resp. RaspA, RaspE, RaspI, RaspO.
Controllers #26, #36, #46: controls the attack time for each individual guiro, resp. RaspA, RaspE, RaspI, RaspO
Controller #66: Power ON or Power OFF. This command resets the controllers to their default cold boot values.
Controller #80: Freewheel mode on of off. Note that when freewheel mode is selected, the positioning of the slide may get out of control. Unless you want to save power, freewheel should always be low (on).This controller is only implemented for research and development.
Controller #81: Nulspeed controller: Sets a value for the highest value wherewith the motor will not run. This controller is only implemented for research and development.
Controller #82: Minspeed controller: Sets a value for the lowest value required to make the motor move. This controller is only implemented for research and development.
Controller #83: Startup controller: Sets a value for the speed required to make the motor start. This controller is only implemented for research and development.
Controller #100: Position and trajectory callibration command. Do not use this in sequences, for it blocks midi reception for the entire duration of the callibration procedure! As long as the callibration procedure takes, both lights will stay on as a warning for the user. At the end of the procedure, both lights will be dimmed. The parameter values are used to select the reco-reco module to calibrate: 60 = RaspA, 64 = RaspE, 67 = RaspI.Controller #101: Implemented for debugging purposes only. It switches the midi out messaging on or off. By default this is always OFF, as is slows down the code. If you want to know the messages it sends, please check the sourcecode for the firmware.
Controller #123: All notes and lights off. No controller reset.
Medewerkers aan dit projekt waren en zijn:
- Mattias Parent
- dr.Hans Roels
- Kristof Lauwers
- Moniek Darge (video shots)
- dr.Godfried-Willem Raes
- Troy Rogers
- Bert Vandekerckhove
Technische litteratuur:
- Trilogy Catalogue
- Anaheim manual
- ACT Motor BLDC-8015
- Howard B.Cary 'Modern Welding Technology' , ed.Prentice Hall, New Jersey, 1989.
Kostprijs berekening voor het projekt (3/4 modules):
item aantal optional bron kost Trilogy Ironless 210-2 motors 4 USA-stock -[ bestelnummer bij Parker:
I-Force 210-2-A-NC-WD3-S-8 voor de motorspoelen.
Anaheim controllers MDC151 4 USA-stock
[deze bleken uiteindelijk totaal ongeschikt]
ACT controllers
BLDC8015
4 Reichelt Power supply 1 <RaspA> 1 Logos stock - 300VA Wielen, 400 mm 8 Kaiser & Kraft Zwenkwielen Tente, blauw 8 Brico Inox kokerprofiel 100 x 100 x 6 4 meter Demar Inox kokerprofiel 25 x 25 x 2 3 meter Demar Bouten M10 x 20 24 Fabory Bouten M8 x 20 100 Fabory Bouten M5 x 20 Fabory Bouten M6 x 80 10 Fabory Bouten M4 x 50 Fabory Bouten M3 x 60 Fabory Bouten UNC #6-32 50 Temu Bouten UNC #8-32 100 Temu Inox as, 12mm
500 lang4 MEA Inox buis 25 x 2 x 200 8 Demar Inox buis 20 x 2 x 200 8 Demar Stelringen inox binnenmaat 20 mm 8 MEA 74HCT14 chips 8 Farnell 18F2620-ISP 4 Microchip 75174 buffers 4 Farnell 6N137 4 Farnell ECE10US05 4 Farnell 25A gelijkrichters 4 Farnell Elko's 47mF / 80V 4 Farnell Toroidal transformer 225VA <RaspI> 1 2 x 25V Farnell 953 2846 Bamboe, 115 en 155 mm diameter 6 meter LED lamp - RaspA 2 12V - 170 lumen 3000L Sencys. G4 socket Toroidal transformer <RaspE> 1 multitap recycled from laboratory power supply Erea multitap transformer 1 finally not used Titanium plaat 2 mm dik & 3 mm dik. Titanium Services Teflon plate 8 3 mm dik Eriks, in strips van 35 mm, lengte 120 cm Teflon tape 4 1 mm dik Temu Pantograaf 4 gerecycleerd van afgedankte burolampen Tie straps 8 gebruikt als glijders onder de motorslede Resonator board 1 1 met Kemo amp binnenkant kokerprofiel Resonator board 2 1 met Kemo amp binnenkant kokerprofiel Resonator board 3 1 8 Ohm horn driver tweeter - Temu
1.2kHz-20kHz, 40W, 1'3/8" thread, throat 1" (25mm), voice coil 1", Titanium.
Vigortronix 3 12V - 5A VTX-214-060-212 12V Regulators 2 RaspE KA278RX_12 Rectifier <RaspI> 1 1200V-88A PSD82-12 Panel meter 5A 2 Model670 5A full scale (RaspE and RaspI) I-Force trilogy 4 replacement coils Order nr.: 210-2-A-NC-WD3-S-8
Bouw- en ontwikkeldagboek:
09.10.2003: Aankoop -met de hulp van Troy Rogers- van vier Trilogy lineaire motoren uit de USA. Eveneens besteld: vier Anaheim controllers voor BLDC motoren.
22.01.2025: Uitwerking van een PIC processor board voor de besturing van de Anaheim modules.
23.01.2025: Begin ontwerp PCB.
24.01.2025: Uitzoeken van geschikte voedingstransformatoren.
25.01.2025: Blijkt dat we toch voorzieningen moeten nemen voor sensoren. Minstens op de uiteinden van de motoren zijn die onmisbaar. Verdere verbeteringen aangebracht aan het PCB. Nu ook met MOSFETS voor extra's zoals lichtjes of extra elektromagneten. Wanneer we lichtjes willen plaatsen is evenwel ook een extra voeding 12V of 24V noodzakelijk...
26.01.2025: Schets van een mogelijke konstruktie:In deze schets zijn de minimaal noodzakelijke afmetingen gegeven, Kokerprofiel 100 x 100 x 8 hebben we nog voldoende op voorraad voor de konstruktie van vier dergelijke modules. Twee kokerprofielen uitgesneden.
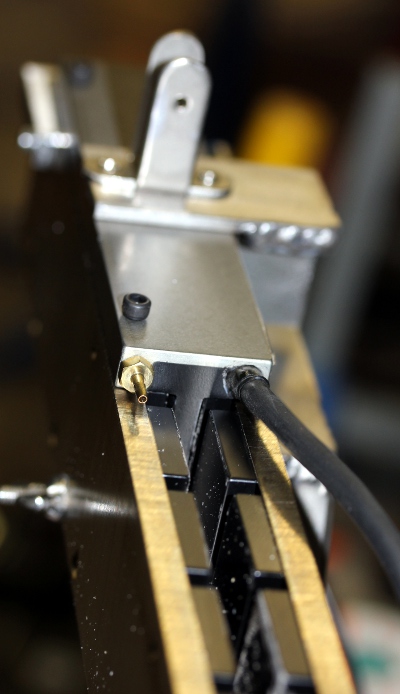
In het eerste exemplaar alvast 8 gaten 6.8mm geboord waarin we M8 schroefdraad tapten. Hiermee kunnen de montageplaten van de zwenkwielen worden vastgezet zonder moeren. 3 mm gaatje geboord aan de bovenkant voor het vastzetten van de netstroom IEC konnektor: een mannelijke ingang en twee uitgangen. Dit onderdeel heeft een ingebouwde vervangbare zekering.
In het zekeringschuifje is trouwens plaats voor een reservezekering. Bij opstelling in gallerijen of musea zijn zodoende veel minder stopkontakten nodig. Dit systeem pasten we eerder al toe bij de bouw van het audio-art installatieprojekt 'Plus-Minus'. Tentatieve presentatie op de lastafel:
27.01.2025: De PG out uitgang van de Anaheim controllers zouden we kunnen gebruiken als excitatiebron voor een mechaniekje dat parallel zou kunnen lopen met alle bewegingen van de motor... Te onderzoeken dus. Verder werk aan de 100 x100 basisprofielen. De kobaltboortjes van Multicomp -Made in China en aangekocht bij Farnell- zijn volstrekt onbruikbaar. Rotzooi en totaal ongeschikt voor inox... Wielen besteld bij Kaiser en Kraft, 7-spakige wielen van 400 mm diameter: 8 stuks, totale kost 492,71- Euro. Schets met 400 mm wielen:De wielen -Tente fabrikaat, maar geleverd door Kaiser & Kraft, hebben wel een levertijd van twee weken...
28.01.2025: Aanmaak vier IEC netingangen met 3mm montagegaatje. Bestudering van de mogelijke montages voor de lineaire motoren. Verzameling geschikte analoge voedingen en komponenten om die op te bouwen.
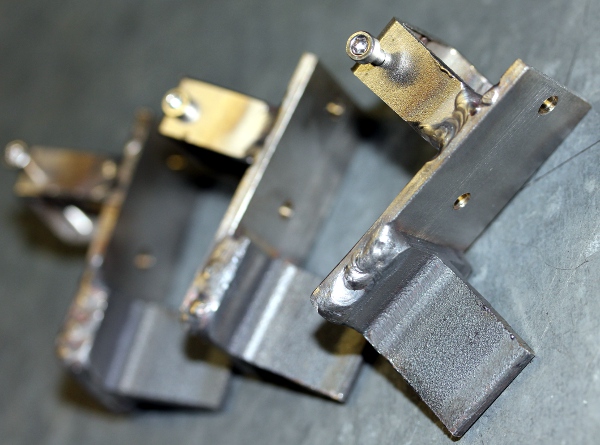
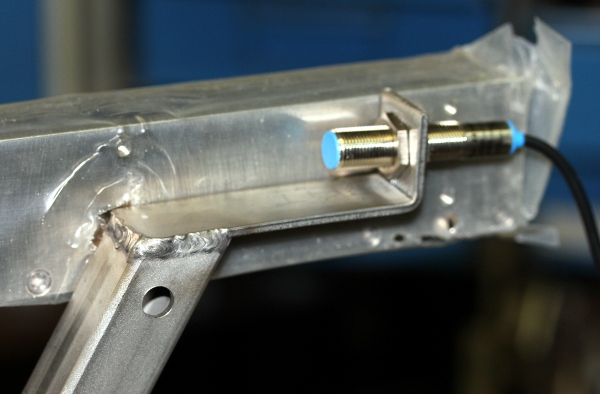
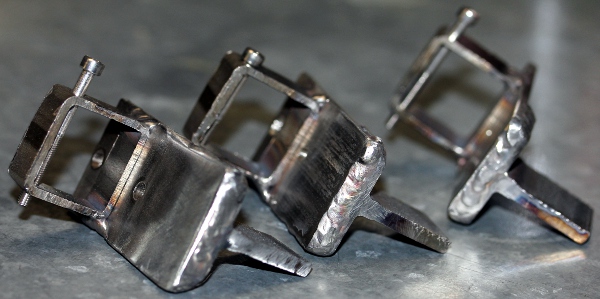
29.01.2025: Konstruktie van de steunen voor de lineaire motoren: vastzetten gebeurt met M4 x 50 boutjes, terwijl de onderkant van de onder een hoek van 60 graden geplaatste steunen vastgelast wordt op het zware kokerprofiel van de wielbasis. Voor de steunen zaagden we 8 stukken inox kokerprofiel 25 x 25 x 2. Aangepaste en verbeterde tekening:De keuze van de hier toe te passen sensoren voor de trajektbegrezing hebben we nog niet gemaakt. We onderzochten vele mogelijkheden, maar de meest wenselijke sensoren kunnen we ons -door onze ellendige subsidieringstoestand- niet veroorloven. Die kosten immers 100 euro per stuk en we hebben er alvast 8 nodig!
30.01.2025: Bestelling sensoren en 5V voedingsmodules bij Farnell. Boren en tappen van het hoofdprofiel. Uitleg en demo voor bezoekers atelier,. Bespreking konstruktie guiros uit bamboe met Mattias Parent.
31.01.2025: CT-scan longen... verontrustend. Onderwerp van de sensor-houders. Sensoren geleverd door Farnell. PCB ontwerp doorgestuurd naar Polo voor aanmaak films.
01.02.2025: Afzagen 8 stuks inox buis 25 x 2 op 200 mm lengte. Deze buisjes worden later zuiver haaks vastgelast op het zware kokerprofiel en dienen als vasthouder voor de dragers van de lange raspen. Die dragers worden gemaakt uit 20 mm buis of volstaaf voorzien van een stelring onderaan en een plat opgelast deel waarop de PVC beugels voor de rasp komen. De binnenkant van de 25 mm buisjes moet uitgeboord of uitgevijld worden, want er zit een uitstekende lasnaad aan de binnenzijde van de buis. Naadloze buis hadden we niet op voorraad.
02.02.2025: Schuine 25x25 kokerprofielen vastgelast onder 60 graden op het eerste prototype onderstel. Testmontage met een motor. Presentratie van de mogelijke konstruktie voor de guiro-houder. De eindsensoren kunnen ook worden gemonteerd op een stukje geplooid 25 x 3 mm plat. Dat kunnen we vastlassen op de 25x25 opstanden.
03.02.2025: Film voor het HUB pcb geleverde door Polo. Meteen een eerste exemplaar van de print belicht en geetst. Enkele baantjes blijken echter kortgesloten. Het was dus foutief om het door ons als GIF getekende ontwerp zelf om te zetten naar PNG, te verkleinen tot 50% en dan in PDF te gieten. Er gaat heel veel resolutie verloren. Vroeger deed Peter Van Lancker dit voor ons, maar daarop konden we nu niet meer rekenen. Voortaan dus beter op 200% laten en als GIF of BMP doorsturen naar Polo...
04.02.2025: Verder bestukken en afwerken van de eerste print.Eerste uitwerking van een mogelijke MIDI-implementatie.
05.02.2025: Eerste PCB afgewerkt en elektrisch getest.
06.02.2025: Begin ontwikkeling van de nodige firmware.Experimenten met de toepassing van externe interrupts op de processor waardoor we aan de toepassing van positiesensoren zouden kunnen verzaken.
07.02.2025: Eerste ruwe schets van firmware klaargemaakt en in principe getest. De interrupt handler voor externe signalen aangesloten op bit 0 van poort B heeft altijd hoge prioriteit. Enkele kleine wijzigingen aan het printontwerp zijn nu wel noodzakelijk. Voor onze eerste testprint kunnen we de zaak redden mits wat kleine patches en dwarsverbindingen met wire wrap draad op de koperzijde van de print.
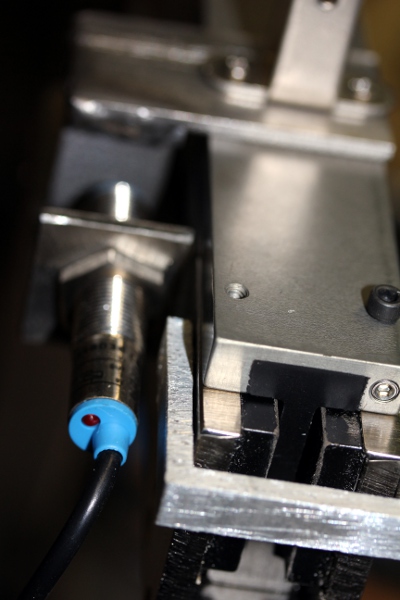
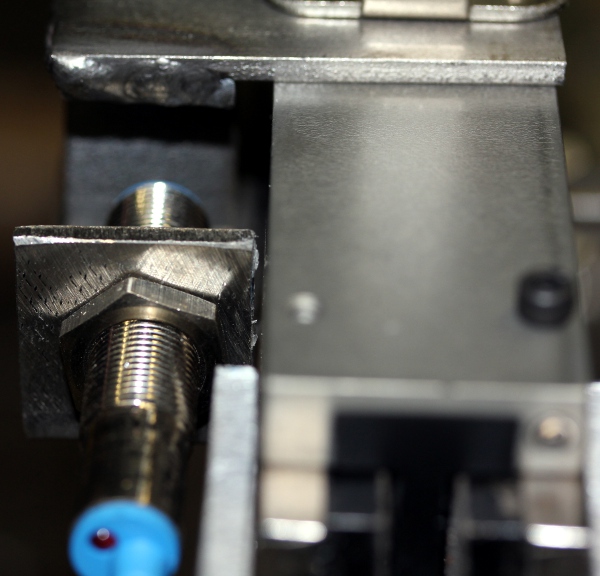
08.02.2025: Konstruktie van de acht inox houders voor de Omron sensoren. De eerste twee lasten we al vast op het prototype.
09.02.2025: Alle vier basisstukken 100 x 100 x 6 kokerprofiel uitgeslepen. Het boren kan weer beginnen.
10-11.02.2025: Verdere ontwikkeling van de firmware. Dit zou de midi-implementatie kunnen worden:
12.02.2025: Bamboe levering aangekomen: twee lengtes van 3 meter. Diameters 115/120 en 150/155 mm. De bouw van de guiro's kan beginnen.
13.02.2025: Bespreking van de guiro konstruktie met Mattias Parent.
14.02.2025: Slecht nieuws voor gwr vanuit het hospitaal i.v.m. de PET-CT scan... Kankergezwellen in beide longen.
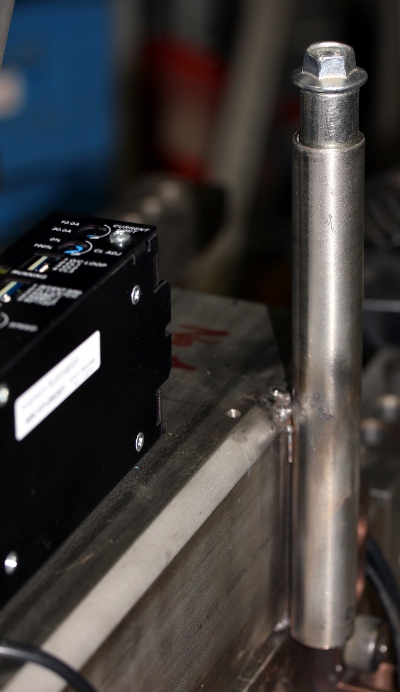
15.02.2025: Montage voeding:Aanlassen van de twee buisjes waarin de guiro-houder moet komen: binnenmaar 21 mm:
16.02.2025: Konstruktie van de houder voor het guiro speelstokje evenals stukjes koolstofstaal (T-ijzer) voor de aansturing van de eindsensoren: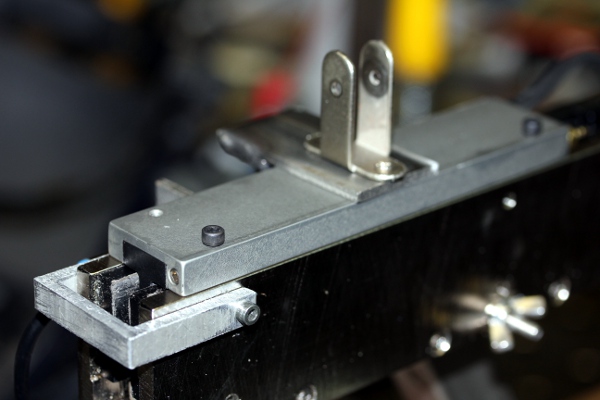
17.02.2025: Laswerk en konstruktie van de draagstruktuur voor de drie overige raspen. Begin bedrading van de Anaheim controller op RaspA. Helaas hebben de motoren geen metrische, maar volkomen anachronistische UNC schroefdraad... Voor de montage op de 'rotor' (slede) moeten we #6 - 32 UNC boutjes zien te vinden. Uittekenen van de voeding en de bedrading:20.02.2025: Konstruktie van drie opzetstukken voor de montage van speelstokjes op de motor sleden van modules 2,3 en 4.
21.02.2025: Uitgeschakeld wegens medische ingreep: biopsie onder volledige narcose...
22.02.2025: Eerste ruwe elektrische test op module 1, nog zonder microcontroller. Met ingeschakelde spanning is de motorslede zachtjes bekrachtigd en zakt de voedingsspanning tot 35.5V.
23.02.2025: Alle montagegaten voor de zwenkwielen op alle modules geboord en getapt. Modules 3 en 4 krijgen zwarte rubber wielen gemonteerd met M10x20 bouten. De M10 tappen slijten wel erg snel op dit dikke en harde inox.
24-25.02.2025: Verdere ontwikkeling van de firmware. Redaktie van de testkode in GMT, 'slagwerk' kompilatie. Testen en debuggen van beide softwares.
26.02.2025: Begin bouw voedingsmodule voor <RaspI>, met toroidale transfo 225VA, 2 x 25V (Farnell order code 953 2846). Drager gelast met gelijkzijdige driehoek en nylon centerplug voor de transfo, gedraaid op de draaibank. Montage met twee M6 bouten op het basiskokerprofiel. Calibratie kode toegevoegd in de firmware: deze loopt alleen wanneer de stroom wordt ingeschakeld. Tijdens de calibratie luistert de robot niet naar inkomende midi kommandos.
27.02.2025: Voeding voor <RaspE> uitgetekend:
28.02.2025: Verder werk aan <RaspA>. Test montage van de komponenten voor de 12 V voedingsspanning. Levering van de acht bestelde 400 mm diameter wielen met 12 mm as. Helaas hebben ze nu zwarte banden terwijl hetzelfde type bij vroegere leveringen mooie lichtgrijze banden had. Bedrading voedingsgedeelte.
01.03.2025: Montage van de 12V lampjes, links en rechts. Kabelboom aangelegd tussen hub board en de Anaheim controller.
02.03.2025: Zekering in de IEC net-ingang geplaatst en eerste elektrische test... De motor krijgen we echter niet aan de praat...
03.03.2025: Verdere testkode toegevoegd in GMT en firmware aangepast voor een veel tragere scaling van de motorsnelheden...
04-06.03.2025: Werken stilgelegd wegens medische redenen: longkanker en planning ingrepen chemo- en radiotherapie...
07.03.2025: IEC netingang vastgelijmd binnenin het basis kokerprofiel. Centraal wielstel vastgezet met twee stelringen 12mm.
08.03.2025: <RaspA> op de zeshoekige atelier tafel opgesteld voor eenvoudiger toegang en tests.
09.03.2025: Proefmontage van een eerste grote bamboe rasp. Verdere research: de hal-sensors werken zoals het hoort... maar de motor vertikt het nog steeds. Hier is een document m.b.t. de fysica en berekening van deze motoren,
10.03.2025: Er moet iets fundamenteels fout zijn met de match of mismatch tussen Anaheim controllers en de Trilogy motoren....
11.03.2025-26.03.2025: Werken tijdelijk stilgelegd wegens medische behandeling longkanker.
27.03.2025: We krijgen de lineaire motor niet goed aan de praat met de Anaheim controllers... Er is klaarblijkelijk iets mis met de schakelsekwensen van de hall sensors, hoewel de sensors zelf naar behoren blijken te werken. Mogelijks kunnen de controllers helemaal niet om met de hier nodige lage 'toeren'-tallen.
28.03.2025: Zoekwerk naar alternatieven voor de Anaheim controllers... Zouden de controllers van RS-Pro, type 0206417 geschikt zijn? (274 euro per stuk...) De datasheets bevatten veel te weinig informatie om een en ander te kunnen evalueren, laat staan na te rekenen...
29-30.03.2025: research...
31.03.2025: Firmware versie 1.1. Getest. Oscillaties bij het bereiken van de sensors...
01.04.2025: Verder werk aan de firmware. Moeten we de voedingsspanning verhogen?
02.04.2025: Procedures voor ramping bij starten en stoppen toegevoegd. Controllers voor attack en release geimplementeerd. Callibratie kode getest: dit loopt al redelijk goed. De mechanica moet nog verbeterd worden: vilten op de eind-stoppers, beveiliging tegen vastlopen kabel van de motorslede.
03-04.04.2025: Opname in ziekenhuis voor chemo en radiotherapie. Met dank aan Piet Van Bockstal, Francis Maes en Frederik Stijns voor de door extreme stress opgelopen kanker...
05.04.2025: Verder werk aan de besturing. Blijkt heel wat moeilijker dan gedacht...
06.04.2025: In een test met verhoogde voedingsspanning hebben we helaas de wikkeling van de motorslede doen doorbranden met een rookpluim... Die motor is alvast reddeloos verloren. Als het lukt, kunnen we dus hooguit nog 3 raspen bouwen...
07.04.2025: Vervanging van de motorslede op RaspA. Nieuwe firmware. De thermische zekering -die we niet hadden gebruikt- zou in dit geval niet eens hebben gewerkt. Werken de Anaheim's met trapezoidale spanningen op de motor en zouden we geen sinussen tussen minder dan 1 Hz en 10 Hz moeten gebruiken?
08.04.2025: Voor verdere tests met de motor hebben we onze oude en vertrouwde 5 Ohm, 5 A regelbare weerstanden nog eens van stal gehaald:Hiermee kunnen we de stroom door de wikkelingen goed begrenzen, ook wanneer we de voedingsspanning wat verhogen. Begin konstruktie van een kabelgeleider voor de verbinding tussen motorslede en motorcontroller. Dit zouden we helemaal in aluminium kunnen uitvoeren.
09.04.2025: Wat we ook proberen, we krijgen de motor maar niet aan de praat. On-line overleg gepleegd met een ingenieur van Faulhaber. De BLDC controller moet in elk geval sinussen genereren en niet trapozoidale signalen. Dat staat nu wel vast. Types MC5005S of MC5004P zouden geschikt kunnen zijn. Deze kosten wel ca. 500 euro... We kunnen natuurlijk ook eens een experiment opzetten met BLDC controllers van Reichelt... Die zijn relatief goedkoop (ca. 50 euro).
10.04.2025: ACT BLDC-8015A-5 motor controllers besteld bij Reichelt. Chinees fabrikaat...
11.04.2025: Nieuwe controllers geleverd en meteen aangesloten en getest met de bestaande firmware.
12.04.2025: Herberekening van de parameters en aanpassing van de firmware. Aanpassing van de schakelschema's:
Noteer dat de hall sensors in omgekeerde volgorde aangesloten worden, overeenkomstig een hoekplaatsing van 240 graden.Twee pull-up weerstanden op de fault (alarm) en speed lijnen bleken wel nodig om alles weer aan de praat te krijgen. De voedingsschakeling is nu ook wel aan een herziening toe. De spanning is immers zowat 8 Volt te hoog. We kunnen natuurlijk een 'dikke' 4 a 5 Ohm weerstand in serie zetten, ofwel een LT1083 regulator gebruiken...
13.04.2025: Verder werk aan de herziene firmware voor het midi hub board. Herberekening van de voeding met een LT1083 regulator die 7.5A aankan.
14.04.2025: Uitwerking van de firmware. De brake input blijkt niet erg bruikbaar, want genereert telkens foutmeldingen. We kunnen ook helemaal zonder indien we de versnellings- en vertragingskurves zelf programmeren... Hier is een korte video van onze eerste experimenten: MP4-Reco-1.
15.04.2025: De motor controller levert 3 pulsen per periode, overeenstemmend met een lineaire verplaatsing van 60 mm. Een puls komt dus overeen met 20 mm. Voor het hele trajekt van 1065 mm, krijgen we dus maximaal 54 pulsen.
18.04.2025: De schakelsekwensen voor de driefazige brug waarmee de motor wordt aangestuurd moeten eruit zien alsvolgt:In de tabel is 'pos' de positieve helft van een met pwm opgebouwde sinus en 'neg' de negatieve helft. De positieve helft aktiveert de bovenste transistors of mosfets in de brug, de negatieve de onderste. Waar Z staat, is geen van beide transistoren geleidend.
19.04.2025: Verdere metingen op het prototype. De werking is nog lang niet zoals het hoort... Het lijkt er sterk op dat de PIC midi-commando's mist.
20.04.2025: Testkode in GMT herschreven. Dit is de bedrading van de motor controller nu:
21.04.2025: Controller 69 (automatisering van de lampjes) helemaal weggehaald uit de kode. De lampjes doen het nu altijd. Nieuwe experimenten met de bestaande voeding en een stroombegrenzingsweerstand van 5 Ohm. De thermische schakelaar ingebouwd in de slede blijkt hoogst onbetrouwbaar te funktioneren. De controllers voor attack en release in de firmware blijken het naar behoren te doen: hier is een video met het resultaat op onze oscilloskoop. De onbetrouwbaarheid van de motor kan drie oorzaken hebben: enerzijds mechanisch (glijweerstand en parallelisme van de beweging), anderzijds zwaktes in de firmware of nog, problemen met de karakteristieken van de voeding.
22.04.2025: Een dag met twee bestralingssessies voor radiotherapie, desondanks opnieuw een grondige meetsessie aan de robot... Antieke hittedraad amperemeter opgedolven: prima geschikt hier. Technische gegevens: bereik 0-2.5 A ac, Inwendige weerstand 0.312 Ohm. Spanningsval over de meter bij I=2.5A, 780mV. Vermogensverlies: 2 W. Bouwjaar: 1943! Voedingsschakeling opnieuw uitgetekend:Noteer dat het een hittedraad amperemeter is en dat derhalve de polariteit irrelevant is. Worden die dingen nog gemaakt vandaag? De vier 1N4007 diodes paralel geschakeld op het draaispoelelement vormen een bescherming tegen overspanning en begrenzen de spanning over de meter tot 1.1 V.
24-25.04.2025: Opname in ziekenhuis voor chemotherapie en bestralingen...
26.04.2025: Stroom-monitoring module afgewerkt en met twee M5 boutjes op het chassis vastgezet. Eerste tests.
27.04.2025: Metingen. Het betrouwbaar opstarten van de motor blijft een probleem. We kunnen de voedingsspanning weer wat verhogen, want de vermogensweerstanden in serie bieden een adekwate bescherming tegen te hoge stroom bij stalling van de motor. The thermoswitch ingebouwd in de slede blijkt hoogst onbetrouwbaar en levert allerlei glitches op tijdens bewegingen van de motoren. Zou het een mechanisch bimetaal mechanisme kunnen zijn?
28.04.2025: Verdere research en metingen. Hall sensor spanning nagemeten en blijkt 15V te zijn in plaats van de 5V met de Anaheim motor controllers. Da's evenwel volkomen binnen de specifikaties volgens het datablad van de motor: spanningen tussen 4.5 V en 18V zijn toelaatbaar. De slechte werking van de thermische 'beveiliging' kunnen we definitief konfirmeren. Dit werkt gewoon niet en glitcht de hele tijd. Wie dat ontworpen heeft is een gekonfijt oen.
29.04.2025: Verder werk aan de testkode. Key-pressure tests toegevoegd. Parameters voor motor besturing toegevoegd in firmware en parallel in de GMT testkode.
30.04.2025: Verzameling komponenten voor de drie volgende raspa modules. Te misselijk voor echt geconcentreerd werk...
01.05.2025: Extra werkdag in het atelier: uitmeten boor- en tapgaten op het vierkante kokerprofiel voor <RaspE>. Voor de voeding kunnen we een fikse toroidale transfo recycleren uit een ter ziele gegane labo-voeding. Een 5A paneelmeterje hebben we ook nog op voorraad. Uitsnijden montageplaat voor het hub board.
02.05.2025: Ziekenhuisopname voor chemo en tweemaal bestralingen...
03.05.2025: Boren montagegaten in het kokerprofiel voor <RaspE>. Het tappen van M4 schroefdraad in dit toch wel erg dikwandig inox blijkt niet van een leien dakje te verlopen. Wat doen we fout? Zowat om de vier gaten breekt een tap af in het boorgat met alle moeilijkheden vandien om dat gat dan opnieuw vrij te krijgen...
04.05.2025: Verder werk aan de ingetapte schroefdraden in het basiskokerprofiel. De M12 schroefdraad is voor de grote bekerelko in de voeding. Het grote gat (14 mm) is voor het doorvoeren van de bedrading naar de binnenkant van de koker. Het tappen van alle gaten (ca.40) nam toch zowat de hele dag in beslag.
05.05.2025: Laswerk en montage van de lineaire motor op het basisprofiel. Het lasplan zelf is identiek aan dat voor RaspA.
06.05.2025: Konstruktie eindstops voor de motor uit aluminium U-profiel. RaspA gedemonstreerd voor Jo Santy.
07.05.2025: Konstruktie van de lamphoudertjes voor RaspE.
08.05.2025: Bedrading van het voedingsgedeelte voor RaspE. Tappen van een M12 isolerende nylon schroefdraadstang voor de centrale bevestiging van de toroidale transfornator.
09.05.2025: Uitsnijden Teflon strips voor de geleiding van de motorslede.
10.05.2025: Eerste tests met de gemonteerde Teflon strips: sukses! De startproblemen van de motor blijken hiermee verholpen te zijn. Ook traag bewegen blijkt nu plots toch mogelijk. Probleem is nu echter hoe we aan UNC schroefdraad boutjes geraken #8-32 (met verzonken kop voor de Teflon strips) en #6-32 voor de slede.
11.05.2025: Konstruktie van een nieuwe draagplaat voor de motorslede waarop een trekmagneet kan gemonteerd worden. Deze plaat maakten we uit titanium: da's erg licht en heel erg sterk.
12.05.2025: Montage trekmagneet: Black Knight, type 121-420-610-620, werkend op 12 V, bij 100% duty cycle. Tests met de variabele labovoeding: regeling van de trekkracht belooft goed te werken. Nu maar hopen dat de PWM niet teveel storingen oplevert voor de sensoren...
13.05.2025: Zoeken naar siliconen meetsnoer voor de bedrading van de trekmagneet. Die draden moeten mee bewegen met die van de motorslede en moeten dus heel erg soepel zijn.
14.05.2025: 4-aderig soepel snoer opgedolven, gemonteerd en aangesloten. Eerste tests: de elektromagneet doet het inderdaad. Konstruktie van de pantograaf uitgaand van een oude burolamp met veren.
15.05.2025: Beugels voor de bevestiging van het bamboe besteld bij Santens. Multicore kabel aan de motorslede ingekort, voorzien van kabelschoentjes en opnieuw aangesloten. <RaspA> klaargemaakt voor een allereerste publieke demo op het koncert vanavond.
16.05.2025: Verder werk aan de firmware. Het gedrag van de motor blijft toch shaky. Zou een lineaire geleiding dan toch noodzakelijk zijn? In dat geval echter heeft Trilogy wel een heel erg slecht produkt op de markt gebracht... immers wat zou je denken van een roterende motor die zou geleverd worden zonder kogellagers?
17.05.2025: De toepassingen van de Trilogy motoren die we na enig surfen konden weervinden, maken gebruik van motor positioners (Parker) type T2D. Die zijn voorzien van twee gelagerde geleiders...Dus, toch maar iets van lagering voorzien? Ook glijlagers zouden hier kunnen toegepast worden.
18.05.2025: Nylon tie straps gebruikt als glijders onder de motorslede. Bevestigd met cyaanacrylaat lijm. Dit is alvast een substantiele verbetering en het traag lopen van de motor gaat nu heel wat beter.
19.05.2025: Teflon tape besteld via Amazon. Die kunnen we gebruiken om te kleven op de onder-binnenkant van de magneetstrip. Daar blijkt nog 1.2 mm speling over te blijven.
20.05.2025: Terwijl we wachten op de levering van zowel UNC boutjes als teflon tape, alvast de opbouw van de slede voor RaspE voorbereid.
21.05.2025: De bestelde Teflon tape werd geleverd. Proeven met resonator schakelingen. Eerste proef met gestemde transformator -een oude lijnafbuigtransfo gebruikten we daarvoor- werkt maar levert onvoldoende vermogen aan de luidspreker. Voor een tweede experiment, gebruikten we een hoogwaardige toroidale spoel van 338 mH (dc weerstand 25 Ohm) in resonantie gebracht met een 2u2 bipolaire kondensator:De akoestische grondresonantiefrekwentie van het kokerprofiel ligt op 92.5 Hz (MIDI noot 42, F#3). De LC kring resoneert dus op de oktaaftoon.
22.05.2025: Verdere metingen en experimenten met de resonatorschakeling. Afwerking opbouw van de module voor plaatsing in het kokerprofiel.
23.05.2025: Implementatie controller 8 voor sturing geluidsvolume van de resonator. Aanpassing testkode in GMT.
24.05.2025: De 12V voeding blijkt niet opgewassen tegen volledige uitsturing van de Kemo versterkermodule. Ontwerp opnieuw berekend.Nameten van de golfvorm op de speed uitgang van de motor controller. Klaarblijkelijk hebben we hier smalle pulsen eerder dan on-off bloksignalen... Firmware opnieuw aangepast voor een beter regelbereik met controller 8.
25.05.2025: Aanpassing firmware. De pulsbreedte op RA5 bepaalt de duur van de resonantiepuls en zo ook het geluidsvolume van de resonator. Konstruktie van de houder voor de guiro op RaspE. Omwille van de stevigheid -deze guiro is heel wat zwaarder dan die op RaspA- gebruiken we hier stukjes T-profiel.
26.05.2025: Nog twee kleine ovale speakers opgedolven: 7 Ohm, 3 Watt. Zou moeten volstaan voor de resonatoren in RaspE en RaspI... Montage van de tweede bamboe guiro op <RaspE>.
27.05.2025: Firmware redaktie en revizie: kunnen we niet toch de brake kommando's gebruiken, aangezien run/stop (enable) systematisch fouten blijkt op te leveren?
28.05.2025: Dagkliniek: Immunotherapie, sessie 1. Firmware volledig herschreven...
29.05.2025: Firmware nu versie 4.0. Controllers voor release niet langer geimplementeerd. Het brake kommando werkt en heeft nu een 'dode' tijd van 50 ms. Tijdens dat interval worden nieuwe note-on kommandos nu volkomen genegeerd.
30.05.2025: Pantograaf gebouwd voor <RaspE>, gebruik makend van een stuk inox T profiel (40x40x4) en een dikke blindflens voorzien van twee extra ingetapte M8 schroefdraden. De pantograaf is gerecycleerd van een oude labo-lamp met lens en een circuline TL-buis.
31.05.2025: Alvast de derde Trilogy lineaire motor onder handen genomen voor de derde reco-reco module. Dragers van de guiro op <RaspA> verbeterd door gebruik te maken van T-profiel en M10 handvastzetters onderaan.
01.06.2025: Om een of andere reden doet de audioresonator op <RaspA> het plots niet meer...
02.06.2025: Wachten op de nieuwe PCB film voor de verbeterde MIDI-hub boards... Inmiddels wat geoefend op het TIG lassen van titanium. Dat lukt prima!
03.06.2025: Inkopen Brico: 12V led lampjes, cyaanacrylaatlijm...
05.06.2025: Films voor de nieuwe hub-pcb's geleverd door Polo. Belichten, etsen en boren van twee exemplaren van dit PCB. Begin bestukking.
06.06.2025: Verder solderen van de twee nieuwe hub pcb's. Volledig afgewerkt op de driepolige Weidmueller sockets na, want die blijken we niet meer op voorraad te hebben... Besteld bij Farnell, maar de levering zal voor maandag zijn.
08.06.2025: Ontwerp 12 V voedingsschakelingen voor RaspE. Hiervoor konden we nog wat 4-benige 2A regulators uit onze voorraad tevoorschijn toveren.: KA278RX_12. We hadden die vroeger met sukses gebruikt voor <Whisper>...
09.06.2025: Geen levering van Farnell vandaag, vanwege een of andere dwaze religieuze feestdag... Vigortronic 12V - 5A smps modules bij te bestellen. Het vermogen van de nog vrij beschikbare wikkelingen op de transfo blijkt onvoldoende om ook de versterkermodule te voeden.De voeding komt er nu zo uit te zien:Projekt gedemonstreerd voor Gamut Inc. , hier de hele week in residentie bij de robots.
10.06.2025: Montage van de 12V voedingsprint op het hoofdchassis van RaspE. Bestelling van de Vigortronix VTZ-214-060-212 modules (12V / 60W / 5A).
11.06.2025: Ontbrekende Weidmueller konnektors geleverd en meteen ingesoldeerd. Bedrading RaspE konnektors hub board, sensors, voeding, motor-kontroller.Board meteen ook van passende firmware voorzien.
13.06.2025: Afwerken bedrading RaspE module.
14.06.2025: er blijkt een kortsluiting te zitten in de bedrading van de 12V verbruikers... Na lang zoeken en testen vonden we de schuldige: een sluiting in een GY5.2 lampvoetje voor de richtingsaanwijzer LED's...
16.06.2025: Eerste tests onder GMT besturing...
17.06.2025-19.08.2025: werk aan Reco stilgelegd wegen ernstige gezondheidsproblemen en ziekenhuisopnames. Komplikaties als gevolg van de immuuntherapie.
20.08.2025: Op de nieuwe PCB's hebben we klaarblijkelijk pull up weerstanden van 4k7 vergeten te voorzien op de pennen RB0 en RC0... Op print #3 meteen gekorrigeerd evenals op de print layout in 600 dpi (file PCB_Hub_linmot_V3.bmp). We monteerden 4k99 exemplaren. Ook op de RaspE print (print #2) voerden we dezelfde korrekties uit. Daarvoor dienden we wel alle konnektors los te maken... RaspE zou nu korrekt moeten werken. Te testen.
06-08.09.2025: Verder werk aan de testkode binnen GMT.
01.03.2026: Werk aan de reco-reco robots terug opgenomen... Waar waren we gebleven? De audio op RaspA blijkt het toch goed te doen. De grote barst in het bamboe doet weinig afbreuk aan de klank. Starten van de motor lukt niet steeds en hangt klaarblijkelijk af van de rustpositie van de motor. Dit is ook het geval voor RaspE.
21.03.2026: RaspE unit weggenomen van de lastafel en begonnen met de onderdelen plaatsing en aftekenen boorgaten voor RaspI, de derde Reco module. Zwaar kokerprofiel op de lastafel geplaatst.
22.03.2026: Opnieuw verzamelen van alle nodige onderdelen. 12mF/200V elko uit labo voorraad opgedolven. Een geschikte ampere paneelmeter hebben we ook nog in voorraad. Hele dag gewerkt aan het boren en tappen van de gaten in de bovenkant van het kokerprofiel. Deze keer slechts 1 M5 tap afgebroken... Wel. werk moeten stoppenn wegens teveel pijn. Morgen zijn we aan het lassen toe...
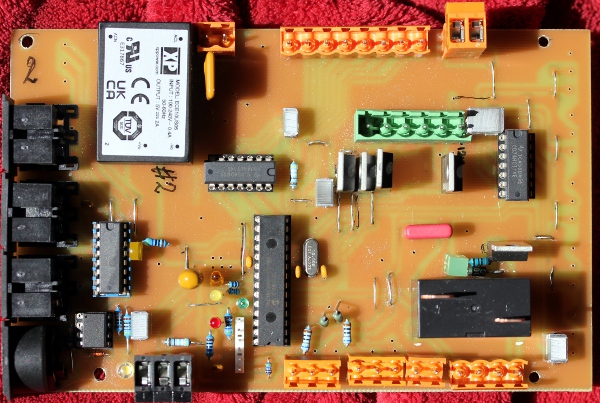
23.03.2026: Hele dag TIG laswerk. Dat is en blijft toch steeds een oefening in Zen. Aanvankelijk wilde onze Genesis laspost niet opstarten, maar na openmaken en grondig ontstoffen met perslucht, deed hij het weer als vanouds. Deze laspost kochten we aan in 1990! Al 36 jaar doet hij dienst in onze werkplaats. Morgen kunnen we alle komponenten op hun plaats vastzetten en beginnen met het bedraden. Hier is alvast het hub board:De soldeerlippen aan de voorkant voegden we toe om het uitmeten en debuggen met de oscilloskoop te vergemakkelijken.
24.03.2026: Montage: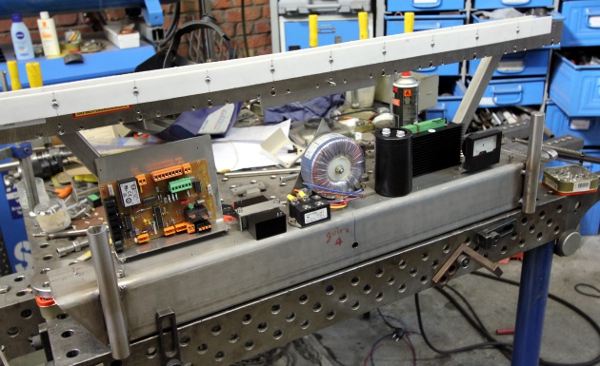
Konstruktie van de pantograaf voor RaspI. Op grond van de ervaringen opgedaan met de vorige twee modules RaspA en RaspE, bouwden we deze pantograaf zonder draaimogelijkheid,. Montage op de lastafel, voorlopig met losgenomen wielen. De aan de voorzijde opgelaste 25 mm diameter buisjes (lengte 200 mm) moeten aan de binnenkant uitgevijld en gehoond worden.
25.03.2026: Konstruktie en montage van de twee lamphouders met GY5.2 fitting links en rechts. De montage van de eindsensoren belooft weer problemen op te leveren: de Teflon strips zitten in de weg van de bevestigingsmoeren van de sensors.
26.03.2026: Eerste elektrische tests van de voedingskomponenten. Alles o.k. Start konstruktie van de slede.
27-28.03.2026: Verder bedrading. Montage van de slede met titanium bovenblad. Pantograaf bedraad en afgewerkt. 12V solenoide voor de bekrachtiging van het speelstokje bedraad. Hiervoor gebruikten we dun mikrofoonsnoer, 2 geleiders met afscherming.
29.03.2026: Schema voor de hub van RaspI opnieuw uitgetekend:Bovenkanten van de Teflon geleiders bijgevijld. Eerste tests zijn erg bemoedigend: ook op trage snelheden blijkt de motor het nu goed te doen!
30.03.2026: Grondig nazicht van de bedradingen. Motor schakeling opnieuw uitgetekend en geannoteerd met de kleurkodes voor de gebruikte draden.Firmware voor <RaspI> opgeladen. Eerste test zijn alweer erg bemoedigend! De signaal test-LED's op het board geven weinig teken van leven...
29-30.03.2026: Verder werk aan de firmware... We gaan proberen om alles via motpos te besturen, waarbij elke rasp slechts 1 enkele midi-noot nodig zou hebben, in casu 60, 64, 67.
01.04.2026: Om een of andere reden krijgen we geen pulsjes te zien of te horen op PA5, de blauw-grijze draad. Ook niet wanneer we een pull-up of belasting aansluiten. Alleen een enkele tok bij starten en stoppen van de motor.
03.04.2026: Nieuwe firmware opgeladen en verdere tests uitgevoerd. Plots een brandgeur en jawel... een van de motorwikkelingen bleek doorgebrand. Wat nu???
04.04.2026: Bij uitmeten bleken alle wikkelingen 10 Ohm te meten, wat zou wijzen op een onbeschadigde motor. Maar een van de hoekpunten naar massa meet nul ohm. Besluit: een van de mosfets in de H-brug van de BLDC controller zou kunnen geneuveld zijn... Te testen. We hebben nog een controller op voorraad, immers ingekocht en bedoeld voor <RaspO>. Alvast ook Parker-Hannifan Corp. gekontakteerd, evenals hun lokale vertegenwoordiger AllHydro NV in Oudenaarde. Het volledige bestelnummer voor de motor spoeleenheid is I-Force linear motor Trilogy 210-2-A-NC-WD3-S-8. Openen van de motorcontroller wees uit dat de IRF2807 mosfets gesneuveld zijn. Meteen datablad van deze mosfet opgezocht. De motor zelf is dus helemaal niet stuk!
05.04.2026: BLDC motor controller gerepareerd: de IRF2807's uit het uitgebrande koppel van de H-brug vervingen we door twee IRF135-B203's. Met een maximale vermogensdissipatie van 441 W, een maximale spanning van 125 V en een maximale stroom van 129A hebben we zeker geen 'zwakker' type als vervanging gekozen. Het blijkt nog te werken ook...
06.04.2026: De pulse-output evenmin als motpos implementatie blijken het niet te doen, wel op RaspA, niet op RaspE met nochthans dezelfde firmware... Waar zit het verschil, en dus de bug? Hele dag gewerkt aan de firmware en aan de konstruktie van een betere geleiding voor de motor op RaspA. Montageplaat voor de elektromagneet en het speelstukje opnieuw gemaakt uit titanium.
07.04.2026: Beugels gemonteerd op de guiro voor RaspI, diameter 125mm. Montagestukken uitezaagd en gelast eveneens voor RaspI: Inox buis diameter 20 mm, dikte 3 mm ; T-profiel 30x30x3. Montagegat voor de beugels: 10 mm. Waarom krijgen we de stelringen met binnengat van 20 mm slechts met veel gehamer over de 20 mm inoxbuisjes? Zijn die uitgezet door het lassen op een uiteinde???
08.04.2026: Firmware voor RaspA verbeterd. De richtingsbepaling in funktie van de motorpositie werk nu naar behoren. We vervingen de beide Teflon geleiders op de magneetrail van RaspA door nieuwe exemplaren, precies op hoogtemaat gebracht van de motorslede. Met schuurpapier het Teflon ('tja da's PTFE en dus een bron van Pfas...) bijgewerkt zodat we nergens nog enige weerstand bij beweging van de slede kunnen voelen.
09.04.2026: Herziening van de testkode in GMT. RB.0 probleem -en dus positiebepaling met motpos- blijft bestaan op RaspI.
10.04.2026: Eureka: de pull up weerstand op PB.0 en 'speed' output van de BLDC controller van 4k7 naar 1k gebracht en alles blijkt nu naar behoren te werken...
11.04.2026: Board voor RaspE voorzien van dezelfde patches voor PB.0 en PB.1 als op RaspI. Alle modules voorzien van de nieuwste firmware. Experimenten met een resonator voor RaspI. Dit moet toch kunnen zonder audio versterker! Wat zouden twee chinese basluidsprekertjes gemonteerd met de konussen naar elkaar gericht opleveren? Het afgestraald geluid is nu aan beide zijden van de kombinatie in faze. De aansturing kan eenvoudig zo:Grote bipolaire kondensatoren bestaan echter niet, waardoor het in resonantie brengen van de trillingskring problematisch wordt. In theorie hebben we een bipolaire kondensator nodig van 680uF...
12.04.2026: Ook voor RaspE zouden we beter een titanium bovenplaat maken voor de motor. Evenzeer moeten we hier betere Teflon geleiders voorzien om start-problemen en blokkeringen te voorkomen. Voor RaspI -na de nodige experimenten te hebben gedaan met de schakeling van gisteren- besloten we tenslotte een 8 Ohm tweeter kompressie hoorndriver in te zetten. Die klank lijkt erg op een reco-reco. Het merkwaardige is dat controller 8 nu eerder werkt als een klankkleurregeling dan als volumecontroller. Deze 'klopgeest' wordt op de binnenkant van het dikke kokerprofiel vastgezet op de uitstekende uiteinden van de M10 schroefdraad van de bouten waarmee de zwenkwielen zijn gemonteerd. Volledig nieuwe bovenplaat voor de slede van RaspE gamaakt. Alle onderdelen deze keer integraal uit titanium. Laswerk in titanium -onder argon gas- gaat erg goed en ook het plooien -ondanks de grote steegheid van het materiaal, valt goed mee. Noteer: lassen met wolfraam-thorium (4%) elektroden en DC met positief aan de elektrode.
13.04.2026: Montage van de nieuw in titanium gelaste slede op RaspE..
14.04.2026: Nieuwe Teflon geleiders gemaakt en geslepen voor RaspE. De elektromagneet op RaspE blijkt het niet te doen. Probleem met de 12V voeding of met de mosfet op het hub board? De resonator doet het heel goed. Op <RaspI> vervingen we het raspstaafje -voor de eerste versie gebruikten we een breinaald- door een exemplaar uit messing.
15.04.2026: De nylon geleider onder de motorslede van RaspE kwam los... Hoe kunnen we dit verhinderen? Wielen op <RaspI> gemonteerd met behulp van onze takels.
16.04.2026: Alle Reco modules op de grond gebracht voor een kleine demo op het koncert vanavond...
17.04.2026: GMT debug: waarom willen de Reco's niet aan de praat op een andere poort dan nul?
21.04.2026: Overwegen en ontwerp voor een volledig zelfgebouwde motor-slede. Dat zou RaspO mogelijk kunnen maken.