|
24 automated sirens
|
|
<Sire>
Godfried-Willem
RAES
2003-2005
|
<Sire>
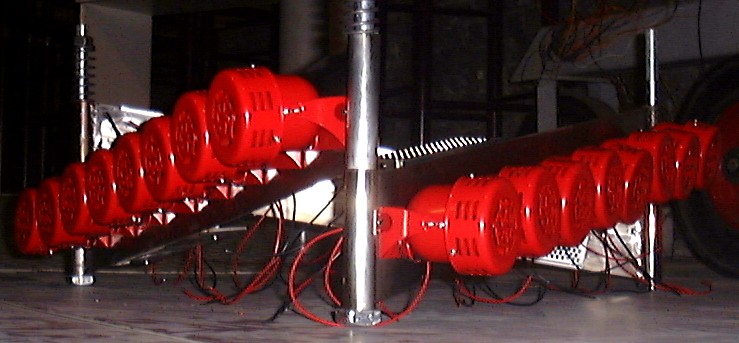
This robot is composed of 24 motor driven sirens. It consists of three independent
modules, each containing 8 sirens. These modules can be arranged in different
ways: the most compact way is an arrangement in a triangular structure designed
to be suspended, although placement on the ground is also possible. The modules
can also be mounted 'in line', forming a long array of 24 sirens, or, the modules
can be placed on different spots in the concert or performance space. It's design
goes back on experiences gained in realizing our earlier automaton 'Sirene'.
This new machine however is fully programmable and can work under midi control.
If we had used the standard midi protocol, this robot would have required no
less than 24 midi channels, since all sirens can play a lot of different notes
polyphonically. To avoid this, we mapped each siren on a single note in the
range 48 - 71, whereas the velocity value is used to control the MSB of the
pitch. (corresponding more or less to the frequency of the midi note), whereas
controllers 48 to 71can be used to send an optional LSB for the pitch, such
that a 14 bit resolution becomes possible. This opens a wide range of possiblities
for composers interested in microtonal musics. A lookup table for exact pitches
will be published soon on this page. The ambitus of the robot is midi note 48
(pppp) to 84 (fff). Although this implementation deviated largely from standard
midi, it is still possible to use an ordinary sequencer to produce a file to
be played on <Sire>. The easiest way is to select one track for each individual
siren and set all the velo-values in that track to the value corresponding to
the pitch required. Within our <GMT> midi file player we have automatic
translation functions that allow composers to submit 'normal' midi tracks to
be played on <Sire>. If this is used, there should be a separate track
for each siren.
For the electric circuitry, a few different designs have been under consideration.
A first one, using only discrete components can be realized after this
schematic. However we tried and finished another design, using a higher
degree of integration (at the detriment of power handling capacity), using L298N
bridge drivers. They need cooling however, since their power specification is
with 2A per half bridge, pretty marginal in this application. Users should in
any case avoid to let all sirens run at their highest speed for any reasonable
amount of time.
 The advantage
of this design, is that braking is easier to implement. If the D input is high,
a fast stop becomes possible. If the classic siren stop (sliding) is a requirement,
we can take the enable pins low. In this design we have enough with 16 control
bits, since we use only unidirectional operation. Bidrectional operation would
require 24 control lines. Designers dream: why isn't there a bridge driver with
integrated high power power mosfets on the market???
The advantage
of this design, is that braking is easier to implement. If the D input is high,
a fast stop becomes possible. If the classic siren stop (sliding) is a requirement,
we can take the enable pins low. In this design we have enough with 16 control
bits, since we use only unidirectional operation. Bidrectional operation would
require 24 control lines. Designers dream: why isn't there a bridge driver with
integrated high power power mosfets on the market???
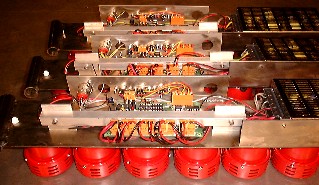
Some more pictures taken during construction:



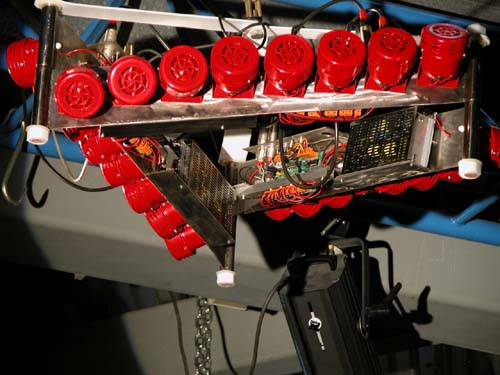
<Sire> finished and suspended in the Logos Tetrahedron (photo by Benn
Deceuninck):
Techical specifications:
- size: equilateral triangle, each side 800mm , heigth: 250mm. Packed for
shipping and trransport: 800mm x 350mm x 200mm.
- weigth: 3 x 5kg for the siren modules + case and accesories. In total ca.
25kg.
- Power: 100-240Vac autoswitching. Connectors: XLR-LNE High voltage type.
(Switchcraft)
- Maximum sound pressure level: <=130dBA
- controll: <Sire> can respond to midi commands through its midi port.
It listens to channel 12.
- Insurance value: 7.500 Euro.
Design, research and construction: dr.Godfried-Willem
Raes
Collaborators on the construction of this robot:
- Johannes Taelman (firmware PIC microcontrollers)
- Kristof Lauwers (GMT-coding)
This robot became an integral part of the <M&M>
robot orchestra in april 2005.
Midi Specifications:
- each siren mapped on a single note in the range 48 to 71. Note ON + velo,
Note OFF. The velo -value will determine the pitch for each siren. Sire1-
module: notes 48-55, Sire2-module: notes 56-63, Sire3-module: notes 64-71.
The range over which pitch can be controlled with the velo byte covers 48
- 84, expressed in midi notes, for a usefull velo-range from 6 to 127. If
a note on command with velo=0 is received, the sirens will use their break
functionality. If a note on with velo= 1 is sent, braking is disabled.
- Using the MidiPlayer that is part of our <GMT> software, <Sire>
also has a pitch mapping mode and a breaking function, both toggled by controller 72:
- value 0: break off, pitch mapping on
- value 1: break on, pitch mapping on
- value 2: break off, pitch mapping off
- value 3: break on, pitch mapping off
- If the break is on, when a note off is received the siren will be halted immediately.
If the break is off, it slows down rather slowly, so you actually hear a glissando down (equivalent
to using a note on with velo 1 when not using the special MidiPlayer)
- In pitch mapping mode, each track for <Sire> is mapped to a different siren, and the
pitch corresponds to the given midi note. (So each
track should be monophonic, but you can use up to 24 tracks for <Sire>.) In this mode, the midi
velocity is ignored, as it is completely dependant on the pitch. If pitch mapping is off, <Sire>
functions as explained above.
- Midi Channel: 13 (1-16) or 12 (0-15)
- Pitch LSB can be further controlled with controllers 48-71.
- Controllers: the PWM cycle lenght can be set with midi controllers: controller
20 for Sire1, 21 for sire2 and 22 for sire3. Changing this controller will
affect the pitch resolution. At high values, the sirens will produce a tremolo
or flatterzunge effect. These controllers should only be used by users who
are familiar with the instrument and the technology behind it. The default
reset value is 32.
- Lights: Sire1: 84,85,86, Sire2: 87,88,89 ; Sire3: 90,91,92
- All Notes Off implemented. (Controller #123)
Music composed for <Sire>:
- "Sire's Pic" , an interactive audio art installation piece using
PicRadar devices.
- Godfried-Willem Raes "O Haupt voll Blutt und Wunden", after JSB.
- Sebastian Bradt, 2005
- Godfried-Willem Raes : "GeroSire", for gesture
controlled <Sire>
- Godfried-Willem Raes: "Qua Sire", for radar
controlled <Sire>
- Rainer Boesch: "Erinnerungen..." (with 8 more robots)
Nederlands:
<Sire>
<Sire> is opgebouwd uit 24 gemotoriseerde sirenes, waarvan
de toonhoogte individueel stuurbaar is. De robot is opgebouwd als een gelijkzijdige
driehoek en ontworpen om te worden opgehangen. De drie elementen, elk bestaande
uit 8 sirenes, waaruit deze robot is opgebouwd kunnen eenvoudig worden gedemonteerd.
Verschillende alternatieve opstellingswijzen zijn mogelijk: in stervorm, als
3 autonome en ruimtelijk gespreide modules, in V-zigzag-formatie, in lijn...
Hulpstukken voor bodemmontage op wieltjes horen ook bij het ontwerp. Alle chassisdelen
en laswerk is uitgevoerd in inox. De automaat past in een relatief kleine koffer
en is dus uitermate geschikt voor vliegtuigtransporten.
Aangezien deze robot uit 24 autonome sirenes bestaat, zou een
standaard midi implementatie het gebruik van niet minder dan 24 midi kanalen
nodig maken. Dit leek ons uiterst onpraktisch en daarom opteerden we voor een
non-standaard aanpak van de midi-implementatie voor deze automaat. Uitgaande
van het feit dat het velo-byte hier geen betekenis heeft -immers, bij sirenes
zijn de geluidsterkte en de toonhoogte op absolute wijze aan elkaar gekoppeld-
besloten we de betekenis van het velo-byte anders te definieren: hier wordt
met het note byte de individuele sirene geselekteerd (48 tot 71). De toonhoogte
wordt dan bepaald door de waarde van het velo byte. In het geval van <Sire>
zal de sirene pogen de frekwentie te genereren overeenkomstig de gevraagde noot.
Aangezien midi-noten slechts 7 bit resolutie (halve tonen) hebben, en onze automaat
toch wel meer in zijn mars heeft, voorzagen we in de controllers 48-71 voor
een verdere precizering van de toonhoogte. Het velo byte vormt aldus het MSB
van de toonhoogte, terwijl de overeenkomstige controller het LSB definieert.
Het tessituurbereik van elke sirene is drie oktaven (48-84), waarbij het duidelijk
is dat de toonhoogte strikt gekoppeld is aan het volume. 48 zal dus pppp klinken,
en 84 fff.
Enkele fotos genomen tijdens de konstruktie van <Sire>:
Midi Implementation Table
Bouwdagboek:
Omdat ons vaak wordt gevraagd hoeveel research, werk en tijd
kruipt in, en nodig is voor, het bouwen van een muzikale robot, hebben we ook
voor <Sire> een beknopt bouwdagboek bijgehouden:
- 26.12.2003: eerste ideen en konkrete tekeningen. Bestelling van de 24 nodige
sirenes.
- 12.01.2004: levering motor-sirenes.
- 14.01.2004: ontwerp elektronische besturing
- 16.01.2004: ontwerp hoofdvorm in Inox.
- 23.02.2004: eerste uitwerking PIC controller besturing i.s.m. Johannes Taelman.
- 20.05.2004: verdere uitwerking van de midi specifikatie.
- 02.03.2005: plasmasnijwerk en laswerk chassis in inox. Draaiwerk montagebuisjes.
Deze automaat wordt demonteerbaar zodat hij in een koffer past die in een
vliegtuig kan worden meegenomen.
- 03.03.2005: Montage sirenes op chassis. Berekening voedings specifikaties.
Laswerk chassis voor voedingen. Alle montage gebeurt met inox materialen.
Alle sirene bouten: M4, inbus hex met cilinderkop.
- 04.03.2005: frees en boorwerk chassisdelen voor konnektors (2x HV-XLR, 3x
DIN en 1x licht). Laswerk konnektor chassis op frame. De modules kunnen onderling
in kaskade worden geschakeld zodat uiteindelijk slechts 1 midikabel en 1 netsnoer
nodig is.
- 05.03.2005: poten met dubbelwieltjes gebouwd en gelast voor bodemmontage,
een van de optionele montagewijzen. Drie 105mm buisjes gemaakt voor individuele
opstelling van de modules. Alle onderdelen moeten in de ene opbergkoffer passen.
- 06.03.2005: opmaak bestelbons voor alle niet in voorraad zijnde nodige onderdelen.
- 09.03.2005: berekening schema voor besturingselektronika met L298 chips.
- 10.03.2005: bestelling kunststof schroefdraden M20 voor assemblage.
- 12.03.2005: montage DIN IN & THRU konnektors op inox chassis.
- 14.03.2005: vijl en polijstwerk.
- 20.03.2005: Uitboren 20mm gaten in vertikale buizen.
- 24.03.2005: levering schakelende voedingen Conrad. 12V
- 28.03.2005: assemblage en afwerking montagedelen. Wel even geschrokken van
de prijzen van de gebruikte kunststof M20 onderdelen: 1 moer kost 3.8€,
de permaglas M20 tige 540€ (per 2 meter), de plastivis draadstangen 75.6€
per stuk, nog zonder 21% BTW.
- 02.04.2005: design werk voor de nieuwe PC boards met de PIC motorcontrollers.
- 06.04.2005: afwerking elektrische schemas en routing PC board in Eagle (Johannes
Taelman)
- 15.04.2005: PC-boards geleverd. Start soldeerwerkzaamheden.
- 16.04.2005: konstruktie draagstruktuur en koelvinnen voor de PC boards in
aluminium. Afwerking solderen prints. Montage <Sire2> module. <Sire3>
module halfweg klaar. Op beide modules, voedingen vervangen door 90-240V ac
input autoswitch exemplaren met het oog op de koncerten in Japan en Korea.
- 17.04.2005: <Sire1>, <Sie2>, <Sire3> volledig bedraad
en afgewerkt. Nu nog slechts de PIC firmware en sire moet kunnen spelen...
Manual updated, inconsistencies removed.
- 18.04.2005: Firmware ontwikkeling door Johannes Taelman. Soldeerwerk reserve
boards.
- 19.04.2005: Versie 1 van de firmware voor Sire1 is operationeel. De eerste
sire module kan spelen en is nu aan evaluatie toe. Met 7 bit PWM resolutie
in het tessituurbereik 48 tot 84 halen we een 1/8 toon bereik, ruim voldoende
dus voor korrekt geintoneerde kwarttoonsmuziek. Met 8-bit (1 bit voor het
LSB) halen we 1/16e. Wanneer we echter 12 bit PWM implementeren krijgen we
duidelijk problemen met vibrato... De tonen klinken dan net zo slecht als
die van een operazangeres. De motoren reageren klaarblijkelijk sneller dan
we dachten. Omdat de maximale spanning of de sirenes door de L298 drivers
en hun dubbele diodedrop bij 12V voeding ca. 10.5V is, moet de voedingsspanning
verhoogd worden tot 13.6V voor een dekking van het volledige tessituurbereik.
- 20.04.2005: afregeling van de voeding zo dat bij volle uitsturing van de
sirenes, er precies 12V over de sirenes staat. Eerste opname frekwentiekarakteristiek.
De resolutie van de toonhoogtesturing neemt toe met toenemende frekwentie.
De 3e orde overdrachtformule voor de berekening van de midi noot uit de velo-waarde
ziet er nu uit als: midinoot = 41.128 + (1.560877 * velo) - (1.880568E-02
* velo^2) + (7.231988E-05 * velo^3). De inverse funktie wordt dan: msblsb
= -1170.342 + (61.77662 * noot) - (1.077227 * noot^2) + (6.265741E-03 * noot^3).
- 21.04.2005: ontwikkeling testkode voor Sire in GMT door Godfried-Willem
Raes en Kristof Lauwers.
- 26.04.2005: Driver kode ontworpen voor Sire binnen GMT.
- 27.04.2005: PIC's voor Sire 2 en 3 geprogrammeerd. Tevens kontrollers (20,21
,22) geimplementeerd voor de cycle lengte zoals gebruikt in de PWM implementatie.
Rem-funktie geimplementeerd. Deze is aktief bij velo = 0. Bij velo = 1 wordt
niet afgeremd. Resolutie is nu default op 9 bits bepaald.
- 28.04.2005: <Sire> geimplementeerd in de GMT file player.
- 29.04.2005: tweede opname spanning/frekwentie karakteristiek. De formules
luiden nu: midinoot = 44.44 + (1.31992 * velo) - (1.604728E-02 * velo^2) +
(6.405674E-05 * velo^3). De inverse funktie wordt: msblsb = -1678.095 + (85.66193
* noot) - (1.443499 * noot^2) + (8.094788E-03 * noot^3).
- 10.05.2005: opnieuw kurves opgenomen. Konstruktie ophangsysteem met teflon
strips.
- 17.05.2005: nieuwe test met O Haupt. Repetitie met Nicoletta en de PicRadars.
- 18.05.2005: jacht op XLR-LNE connectors. Die blijken niet meer in produktie
bte zijn...
- 19.05.2005: Premiere koncert voor en met <Sire>.
- 18.06.2005: Nieuwe opnames kurves voor pitch door Kristof Lauwers. Aanpassing
stuurkode in GMT. Integratie in de GMT midiplayer.
- 30.09.2005: Montage 3 ronde LED spots op elk van de Sire modules. Mapped
on notes 86,89,92.
- 05.11.2005: Montage 3 inbouw LED's (Philips). Mapped on notes 85,88,91
- 13.11.2005: <Sire> op toernee naar Maastricht.
- 13-15.12.2005: <Sire> op toernee naar Denia (Alicante, Spanje): zigzag
grondopstelling.
- 22.12.2005: <Sire's Pic> performed by Marian De Schryver.
- 17.02.2006: Teflon draagbeugels vervangen door inox exemplaren. Het teflon
bleek niet voldoende sterk om het gewicht van <Sire> te dragen.
- 02.11.2006: Sterke houten bevrachtingskist gemaakt voor de in driehoeksformatie
gemonteerde volledige <Sire> robot. Dit met het oog op transport naar
Keulen en later New York. Partij voor <Sire> voorzien in Fall95-06:
Fuer Koeln Geeignet.
- 13.02.2007: laatste ontbrekende XLR-LNE chassisdeel vervaardigd en gemonteerd
op de sire1 module. Sire kan eindelijk als volledig afgewerkt worden beschouwd...
- 31.08.2008: Upgrade van de GMT testkode voor Sire.
- 04.03.2009: Konstruktie van drie van wielen voorziene poten. Aan de bovenzijde
met M20 schroefdraad (250mm lang) ingelast in inox buis van 25mm diameter.
Nu kan sire ook stevig vrijstaand worden opgesteld.
- 12.05.2009: Nieuwe lookuptabellen opgesteld voor de toonhoogtes van de sirenes,
via nauwkeurige meting van de voortgebrachte frekwentie in funktie van de
midi kommandos.
- 10.08.2021: Onduidelijkheden in de midi-manual weggewerkt.
- 15.11.2021: Elektrisch schema opnieuw getekend en in overeenstemming gebracht
het het uiteindelijk geproduceerde en gebruikte PCB:
 Anders dan getekend in het schema, is de voedingsspanning voor de sirenes
in <Sire> echter 12V en niet 24V.
Anders dan getekend in het schema, is de voedingsspanning voor de sirenes
in <Sire> echter 12V en niet 24V.
- 14.09.2023: <Sire> gaat mee met het robotorkest naar de Deutsche Oper
Berlin.
- 02.10.2023:<Sire> komt terug aan in Gent en blijkt in perfekte staat
te zijn.
Afmetingen & andere technische specifikaties:
- hoogte: minimaal 210mm, maximaal (met poten: 750mm)
- breedte (driehoekig) : 7500mm
- gewicht: Modules, elk 5kg. In totaal 25kg met bedrading, kist en accesoires.
- maximale geluidsdruk: te bepalen (> 130dBA)
- polyfonie: 24 onafhankelijke toonhoogtes
- tessituur: 48-84
- data-poort: Midi port. (hardwired to listen to midi channel 12 (offset 0))
- Power requirements: 100-230V ac , 4.5A max. Konnektors: XLR-LNE type. (Switchcraft
or Neutrik).
- Verzekeringswaarde (produktiekost): 7.650 €.
Design, research en staalkonstruktie: dr.Godfried-Willem
Raes
Atelier medewerkers:
- Johannes Taelman (board design en PIC microcontroller firmware)
- Kristof Lauwers (test en player kode in GMT)
Repertoire voor <Sire>:
- Godfried-Willem Raes "O Haupt voll Blut und Wunden", after jsb
[video: http://youtube.com/watch?v=w88kg2fHb0M]
- Godfried-Willem Raes "Sire's Pic"
- Sebastian Bradt "O Sire"
- Godfried-Willem Raes "Le Cacquet..."
- Godfried-Willem Raes "GeroSire" voor <Sire> en een naakte
uitvoerder.
- Godfried-Willem Raes "Qua Sire" voor radargestuurde <Sire>>
en een naakte uitvoerder
 <Sire's Pic>, performed by Nicoletta Branchini
<Sire's Pic>, performed by Nicoletta Branchini- Kristof Lauwers "Interaktieve modules voor Sire en piano"
Last update: 2023-10-11
by Godfried-Willem Raes
Technical notes and repair/maintenance guide:
Power supply: 3 units S-100P-12 (+12V / 8.5A), primary voltage: 85-264Vac.
(the power supply is autoswitching). The output voltage has to be adjusted (upwards)
such that when a velo 127 is given to a siren, the voltage over the motor is
exactly 12V. This adjustment is crucial for the precision of the tuning of the
instrument. An adjustment for pitch output = midi 84 is also possible.
PIC's used: Microchip 18F252 (3 pieces, different firmware: Sire1, Sire2, Sire3)
[note as of 2020: these chips are now obsolete. They can be replaced with 18F2525
types].
Motor Sirens: 12V nominal. 1.3A at 12V dc. Minimum voltage for rotation: 1V.
Lights: :LED spotlights type MR16 (AC/DC type)
Wheels: M10 thread, hex inbus, stainless steel.
PC-board wiring lay out:
These PCB's are marked 'april 2005, Sirepic rev.1'
The datasheet for the motor bridge chip, the L298N,
is here.
The hex-dumps for the PIC-controllers is here: sire1,
sire2, sire3

{kind=link}