|
<Polymetronome> |
 |
|
a musical conductor robot by Godfried-Willem Raes 1968/1994/2012 |
|
<Polymetronome> |
|
|
a musical conductor robot by Godfried-Willem Raes 1968/1994/2012 |
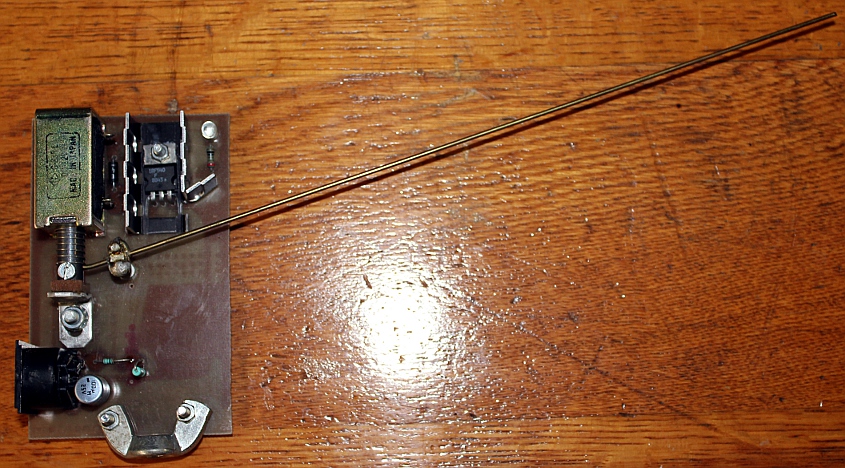
The idea of conceiving music in which different voices play different, possibly unrelated, metres goes back to composers such as Henry Cowell, Charles Ives and somewhat later, Conlon Nancarrow. In many respects it can be considered to be a generalisation of the concept of polyphony itself, thus leading into what became hyperpolyphony in the last quarter of the 20th century. We got in contact with the idea back in 1968 when studying composition with Norbert Rosseau at the Ghent Conservatory. In that context we wrote our composition 'Logos 3/5', a quartet wherein the metres of the parts all have the prime number 3/5 relation. The performance of that very piece is at the base of what later became the Logos Foundation, as it caused quite a scandal on its first performance at the Conservatory. The group of performers became nicknamed the Logos group as if they had committed a collective crime. The scandal with the piece was in part due to the sound material used but certainly also to the way the piece was performed: in order to have the musicians play in those metric relationships stipulated in the score I had designed a metronome circuit to indicate the four required tempi without a common denominator. The circuit - in fact a simple set of flip-flops using double triode valves - steered coloured lightbulbs that were placed close to the performers on the stage. It must have looked like a disco performance, avant-la-lettre. Not done in a conservatory at that time... The original score materials for 'Logos 3/5' are available on a special webpage now. Here is a view of the original circuit:
The original circuit designed for 'Logos 3/5' was demolished sometime in the eighties, but the idea behind it remained and returned vigorously in most of our pure algorithmic compositions, mostly for electronics and later on also for musical robots. In 1995 we wrote a composition 'Fall'95' scored for player-piano and five musicians where again we were in need of an automated polymetric conductor. So we designed a new circuit, this time using a computer equiped with a parallel printer port. This polymetronome could be programmed to guide musicians through no less then 8 freely programmable independent metrums at the same time. This it could also be used as a conductor for compositions such as 'Shifts'.
The circuit consists of a central controller board, connected to the computers printer port, and the eight metronomes that can be screwed on normal microphone stands.
The circuit looks like:

The metronome boards are very simple:
This version of the polymetronome was used in 1994 for the performances of 'Fall' and later also for 'Winter' and 'Spring' (Yes, indeed, my seasons...).On request for Marc Maes in 2001, we designed a 12-tone tempered chromatic metronome to be used for the performance of some specific pieces by Karlheinz Stockhausen as suggested by himself. The requirement was to make a metronome with a full chromatic scaling based on dividers of A=440Hz. The metronome only has a LED light output, but can easily be modified to use a solenoid and a needle as well. Here is the schematic, using a Paralax Basic Stamp:
The firmware is extremely simple: it reads out the switches and uses a lookup table to program the output pin with a periodic square wave. Only one copy of this metronome was made and sold to Marc Maes.
In 2012 we were asked to perform one of our hyperpolyphonic compositions - written for musicians - again. The problem was that although the polymetronome circuits still worked well, there were no longer computers available with the required parallel printer port. Hence we had to revise the project and the circuitry again.
The first solution we found was to implement a parallel port on a Microchip PIC controller and to provide it with a MIDI input. This hardware ended up looking like:
The MIDI implementation has two main modes of operation:1.- Low level control:
Here all pulses required to make the metronomes toggle are generated and sent by the steering computer through its MIDI port. Note ON commands bring the metronome needle down whereas Note OFF command release the needle again. Each metronome is mapped on a midi note in the range 36 to 43. In music notation:
2.- Periodicity control::
In this mode the circuit takes care itself for the periodicity of the tempo shown. The tempo should be programmed into the polymetronome (one for each metronome) using MIDI controllers. Controllers 36 to 43 determine the MSB of the requested tempo, whereas controllers 68 to 75 determine the LSB. The 14-bit values thus constructed is the period time in 1.8us units.
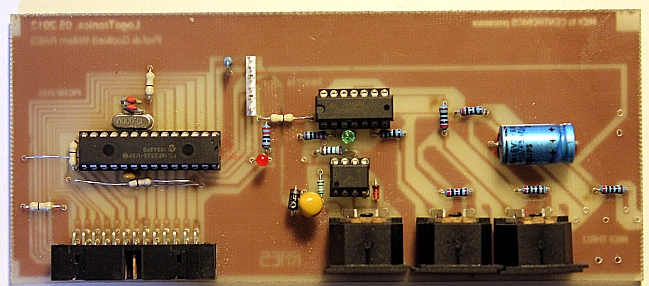
Controller 66 switsches all metronomes off or on, whilst controller 65 can be used to synchronize all metronomes on start after all period-times are programmed. The single sided PC board (200% scale) for this circuit is:
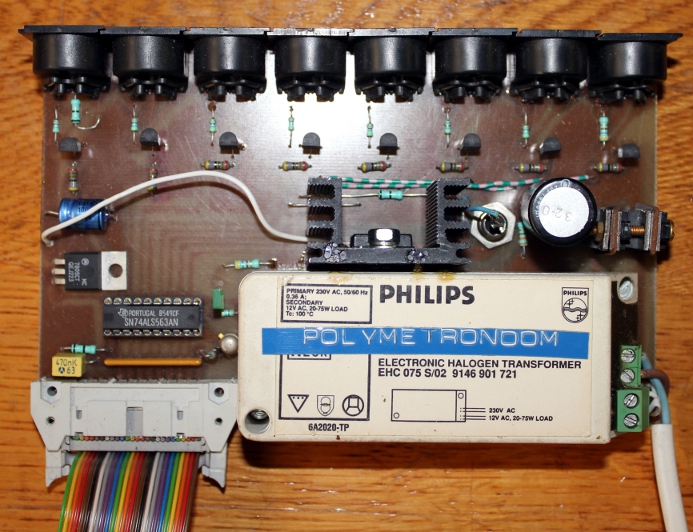
The automate makes use of a single Microchip 18F2525 microprocessor. The Centronics port was implemented in order to be compatible with the legacy hardware we had. Next to the MIDI input we provided three MIDI Thru connectors to facilitate integration in our robot orchestra. The firmware for the microcontroller is available for download. The board, with all components soldered in place looks like:
At the occasion of this revision of the Polymetronome, we also improved some mechanical issues in the design. Originally the hands of the metronomes had a tendency to bounce vigourously on their resonant frequency on reaching each end position. To avoid this, we mounted 10mm thick felt covered dampers on the metronome boards. Herewith some pictures of these improvements:
The control module, combining the old hardware board and the new microprocessor board, forms now a single unit mounted in a stainless steel frame.
The eight DIN connectors in front are to connect the eight metronomes. The DIN connectors on the back provide in the MIDI input and through connections.
The problem with this design is that the hand of the metronomes do not really behave like pendulums as normal metronomes do. In order to achieve pendulum like movement without actually using pendulums, we started designing something novel. The idea is to use bidirectional solenoids steered with complementary PWM. This way a fluent swinging of the hand becomes possible. This design is for autonomous programmable metronomes whereby each metronome uses its own microprocessor. Each metronome furthermore is equiped with a small display that allows cues to be sent to the performers. .
The project is as yet in the design and construction phase. The electronic circuit looks like this:
Godfried-Willem Raes
First version published in Logos Blad, 1992
Published on the Web in dutch on July 28th, 1997 by Godfried-Willem Raes. Pictures and circuit drawings added 27.05.2012. English version uploaded 30.05.2012.
Last update: 2014-05-04