|
<Ake>
|
|
an automated accordion
Godfried-Willem
RAES
2003-2009
|
Robot:
'Ake'
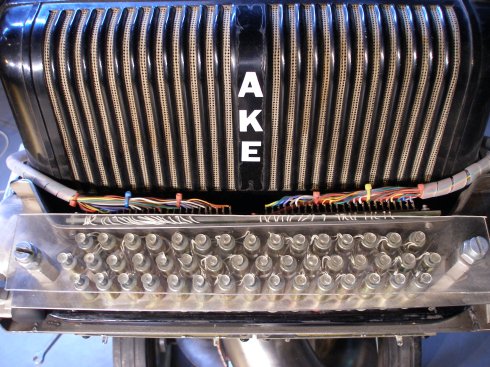
The design of this musical robot started with an old Hohner Musette II accordion.
First of all, we restored and retuned the whole instrument. All chord playing
mechanisms where removed so chords can now be freely build and combined by the
user. The instrument has two sets of 152 reeds: one set for suction, one for
blowing wind. So, in total we have no less than 304 reeds inside the instrument.
The challenge in automating the accordion is not so much the reed playing,
but definitely the wind control: both suction and overpressure wind can be applied
and fast switch over between both modes is essential if one wants the automaton
to sound like, let alone better than, a human player. Our solution in this design
was the construction of a 4-way mixing valve, connected to the blower:  The blower has variable windpressure, but allows only for slow variation of
air pressure because of the high inertia of the fan blades. The valve however,
can react pretty fast. It is driven by a stepping motor and a dented belt. Thus
it allows for a wide variety of amplitude modulations as well as musical expression.
However, it requires intelligent composers to use these possibilities, since
the appropriate expression control commands need to be send.
The blower has variable windpressure, but allows only for slow variation of
air pressure because of the high inertia of the fan blades. The valve however,
can react pretty fast. It is driven by a stepping motor and a dented belt. Thus
it allows for a wide variety of amplitude modulations as well as musical expression.
However, it requires intelligent composers to use these possibilities, since
the appropriate expression control commands need to be send.
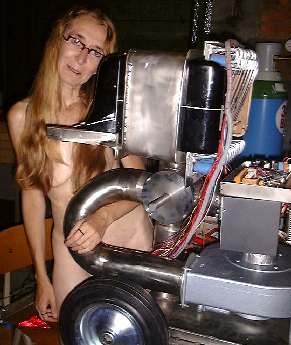
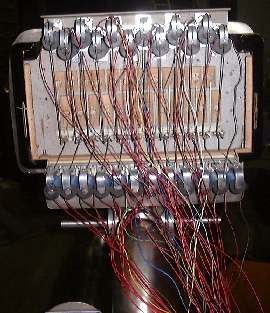
The constructional parts for this robot are all made from stainless steel,
as can be seen of the pictures below taken during the construction:









The entire circuitry for this robot makes use of three fast
PIC controllers: Microchip PIC18F2525 - I/SP type. The first of these controllers
takes care of the midi input parsing, the note on/offs for the latches and their
PWM control, Mosfets and solenoids, whereas the second PIC steers the register
solenoids and the video camera. The third PIC controller takes care of the motor
control and the 4-way mixing valve driven by the stepping motor and its associated
sensing components.
The schematic for the first PIC, with three latch and mosfet boards to drive
the note solenoids is shown below:

The circuitry around PIC2 looks like:

In our first version, this controller had a lot more to do, since we than used
a bipolar solenoid to control the windvalve, read the position sensor and slow
ac PWM to steer the motor. In 2008 we changed and improved this, first of all
by replacing the bipolar solenoid with a stepping motor and by inserting a true
3-phase motor controller for the fan. This made us introduce the third PIC microcontroller
placed on our midihub board, were reception and repartition of the midi command
signals now takes place. Here are the detailed schematics:
Wiring diagram for the motor controller:
Mapping:
Midi note range: 31- 94 (almost 6 octaves). The bass side is remapped an octave
lower then real sounding, such as to avoid the overlap of notes 49 to 54 between
melody side and bass in the midi implementation. Thus users should send note
19 - 30 for the pedal basses , 31- 42 for the chord basses and 49-94 for the
melody notes.
Note that notes 19 to 30 sound always 2 reeds, an octave apart. Notes 31 to
42 sound always 3 reeds, each an octave apart. In musical notation terms:
Note Off commands are required.
Controller 1: Wind pressure controller. The motor speed is controlled here.
Controller 1 (the standard wind controller) is used as a midi command. Value
range=0 to 127. With value 0 the motor will turn at a very low stand-by speed
(10Hz) and obviously the instrument will not sound at all. Motor speed changes
should be sent at a maximum rate of once a second, since the inertia of the
motor does not allow any faster response. For fast response, use the 4-way mixing
valve mapped on the volume controller. Note that when blowing wind is used (ctrl
6 > 0) and the motor speed setting is high, leaks can and will occur. This
is very normal on the accordion and not a design mistake by us. Users and composers
should make sure they lower the wind when no notes are to be played. Accordion
players do not move the bellows neither when no notes are played...
Controller 7: Volume control is implemented and has a wide control range. It
controls the absolute value of the wind pressure within the settings determined
by the motor speed (controller 1). Suction and blowing wind are possible. The
volume control (ctrl 7) steers the windvalve through the stepping motor. Values
0-63 set suction wind (0 being maximum suction pressure), values 65-127 set
blowing wind, value 127 being maximum blowing force. This controller is to be
used for fast pressure modulation, within the limits set by controller 1 (motor
speed and wind pressure).
Rotation controllers: [to be implemented]
Controller 17: rotate clockwize, speed set with parameter
value 0-127. When set, this will override the volume controller. When the setting
for this controller becomes zero gain, the mixing valve will return to the position
it had most recently just before reception of controller 17.
Controller 18: rotate counterclockwize, speed set with
parameter value 0-127. When set, this will override the volume controller. When
the setting for this controller becomes zero gain, the mixing valve will return
to the position is had most recently just before reception of controller 17.
Program Change: The single register for the melody side can be controlled with
a program change command. (values: 0 or 1) Value 0 switches off the musette
register, value 1 switches it on.
Lights: Mapped on notes 120-123. Note on/Note Off only.
Ake responds to the midi all-notes-off command (controller 123). This command
releases all note solenoids and dims the lights but does not change the motor
speed. It disactivates the stepping motor for the mixing valve. It
also stops controllers 17 and 18.
Midi implementation table:
| command |
range byte1 |
range byte 2 |
remarks |
| Note Off |
19-42 |
0 |
bass notes . release not implemented |
| |
49 -94 |
0 |
melody keyboard - no release |
| |
120-127 |
|
lites |
| Note On |
19 - 42 |
0 = note off
> 0 = note on
|
bass keyboard - velo not implemented |
| |
49 - 94 |
id. |
melody keyboard - velo not implemented. |
| |
120-127 |
id. |
lites |
| Key pressure |
- |
- |
not implemented |
| Controllers |
1 |
0-127 |
wind pressure motor speed , normal value= 100 |
| |
7 |
0 - 100 |
wind control modulation (expression) (101-127=100) |
| |
17 |
0- 127 |
valve rotating speed CW, 0= off |
| |
18 |
0 - 127 |
valve rotating speed CCW, 0= off |
| |
66 |
0 or > 0 |
on/off switch (motor), on/off switch valve & lights |
| |
123 |
0 |
all notes off |
| Program change |
0 |
- |
musette register on |
| |
1 |
- |
musette register off |
| Pitch bend |
- |
- |
not implemented |
| Sysex |
- |
- |
not implemented |
Technical specifications:
- size: width: 50cm, length: 75cm, height: 85cm
- weight: ca. 65kg
- power: 230V / 300W
- tuning: based on A=440 Hz
- Ambitus: midi note 19-42 (bas), 49-94 (melody)
- Insurance value: 10.000€
Design and construction: dr.Godfried-Willem
Raes (2003-2004, version V1.0, version V2.0: 2008, V2.1:2009, V2.2: 2015)
Collaborators on the construction of this robot:
- Xavier Verhelst (music adviser)
- Johannes Taelman (firmware PIC controllers)
- Moniek Darge (requisites end materials research)
- Kristof Lauwers (application code)
Music composed for <Ake>:
- Moniek Darge "Ake meditations" , a tribute to Pauline Oliveros,
premiered on monday 13th september 2004.
- Barbara Buchowiec: 'Ake Birthday' (for viola and Ake), premiered october
2004.
- Godfried-Willem Raes "Fuzzy Harmony Study #12: Tango", premiered
23th of december 2004.
- Igor Strawinksy "Dedicatio", arr.2004
- Kristof Lauwers & Moniek Darge "Klanklagen Ake", 2005
- Godfried-Willem Raes "An Object for Ake", 2005
- Moniek Darge " Hommage to Ake"
for <Ake> [2'30"] [MP3 download link]
Solo literature:
- La Cumparsita (Tango)
- El Choclo (Tango)
- Gabrieli "Canzona"
- Thomas Morley
Nederlands:
Robot: <Ake>
Voor de bouw van deze accordeon robot, vertrokken we van een kleine
Hohner knop akkordeon uit de musette reeks. De bouw ving aan met de grondige
restauratie en nazicht van zowel de mechanische werking als de stemming van
het oorspronkelijke instrument. Het allereerste wat we volledig demonteerden
en aan de kant schoven, was het vrij ingewikkelde mechanisme waarmee akkoorden
worden opgebouwd in de bassen. Met het oog op vrije programmeerbaarheid wilden
we immers volkomen vrij akkoorden kunnen samenstellen met de voorhanden rieten.
Wat dit betreft is het instrument uitgerust met twee sets van 152 doorslaande
tongen. Het laagste oktaaf in de bas heeft oktaafverdubbeling en maakt dus gebruik
van 2x 24 rieten. Het tweede oktaaf in de bas heeft oktaafverdriedubbeling en
dus 2x36 rieten. De melodiekant heeft 2x 92 rieten in (een beetje ontstemd...)
unisono, maar met verschillende geluidsterkte. Een van beide sets kan worden
in of uitgeschakeld met de registerknop. Samen gebruikt geven ze het 'musette'
register.
Eens het hele instrument opgeknapt en in kaart gebracht, bleek
de automatisering van de diverse toetsen een vrij voor de hand liggende klus.
We hadden zoiets immers al vaker gedaan, o.m. bij de bouw van ons automatisch
harmonium <Harma>. We beslisten de bestaande kleppen zoveel mogelijk te
behouden en haalden ons daardoor extra veel werk op de hals met het buigen uit
inox van de vele nodige trakturen. Voor de baskant worden de kleppen bediend
met kleine 24V traktuurmagneten van de firma Laukhuff. Voor de melodiekant echter,
behielden we zelfs de bestaande knoppen en ontwierpen we een bespeling met Lucas
Ledex duwmagneten. Het ene register waarover het instrument beschikt, werd geautomatiseerd
met twee sterke elektromagneten. Deze dienden behoorlijk zwaar genomen te worden
vanwege de grote wrijving in de windlade voor dit 'musette' register. Een tot
op heden onopgelost probleem lag in het geluid veroorzaakt door de kleppen wanneer
ze door de magneet worden losgelaten. Voorlopig moeten we ermee zien te leven...
Elektromagneten zijn nu eenmaal geen menselijke vingers.
De blaasbalg haalden we geheel weg en vervingen we door een vaste
inox windlade voorzien van een inlaat voor drukwind zowel als voor zuigwind.
Precies hierin bleek de uitdaging gelegen bij de bouw en het ontwerp van een
automatisch akkordeon. De typische muzikale mogelijkheden op dit instrument
komen immers voort uit de over en weer gaande beweging van de balg en de luchtdrukmodulaties
die de speler via die balg realiseert. Daarmee krijgt het instrument een 'punch'
die het harmonium bvb. geheel ontbeert. Om dit mogelijk te maken ontwierpen
we aanvankelijk een soort 4-weg mengventiel opgebouwd uit twee kaviteiten met
elk twee door een duw/trekmagneet bediende kleppen. Het geheel viel evenwel
te log en zwaar uit zodat we uiteindelijk een ronde 4-weg mengkraan bouwden
met een cilindrisch kraanhuis en een vlakke goed aansluitende klepzitting. De
centrale as werd gasdicht gelagerd uitgevoerd zodat voor de bediening een enkele
bipolaire magneet met een bewegingstrajekt van 25mm leek te kunnen volstaan.
De precieze positionering van dit mechanisme liet echter in deze eerste versie
veel te wensen over en daarom ontwierpen we in 2008 een geheel nieuw aandrijvingsmechanisme.
Deze keer gebruik makend van een kleine stappenmotor en een 1:2 snaarwieloverbrenging.
Hiermee gingen snelle en genuanceerde drukvariaties en de daarmee gepaarde gaande
expressieve mogelijkheden toch tot de mogelijkheden behoren. Het geluid van
de stappenmotor moeten we nu echter wel in koop nemen. Omdat een nauwkeurige
reproduceerbaarheid van de positie van de klep essentieel is, voorzagen we deze
van een induktieve nabijheidssensor die een signaal geeft elke keer de klep
een periode doorgaat. Op dit signaal, geleverd door een Pepperl+Fuchs proximity
sensor, wordt de mikrokontroller telkens weer gekalibreerd.  De
windvoorziening wordt betrokken uit een sterke Laukhuff radiale kompressor (7mBar,
2.5m3 /min). Om ritmische overdruk en onderdruk pulsen mogelijk te maken, overwegen
we later ook een aksent-balg toe te voegen, op zijn beurt aangedreven door een
bipolaire elektromagneet. Het spreekt vanzelf dat goede muzikale resultaten
met deze automaat alleen bereikt kunnen worden door ijverige en intelligente
komponisten. Immers, de muzikale expressie kan alleen worden bereikt wanneer
de daarvoor nodige kommandos ook effektief aan de robot worden gegeven. Zonder
dergelijke kommandos speelt de robot de noten ook wel, maar dan klinkt het onverbiddelijk
als een karrikatuur en erg mechanisch. Het is een grote gebruikersfout om de
wind aan te zetten en geen noten te spelen. Dit leidt niet alleen tot lekkende
noten, maar veroorzaakt bovendien ook heel wat volstrekt overbodig achtergrondlawaai.
De
windvoorziening wordt betrokken uit een sterke Laukhuff radiale kompressor (7mBar,
2.5m3 /min). Om ritmische overdruk en onderdruk pulsen mogelijk te maken, overwegen
we later ook een aksent-balg toe te voegen, op zijn beurt aangedreven door een
bipolaire elektromagneet. Het spreekt vanzelf dat goede muzikale resultaten
met deze automaat alleen bereikt kunnen worden door ijverige en intelligente
komponisten. Immers, de muzikale expressie kan alleen worden bereikt wanneer
de daarvoor nodige kommandos ook effektief aan de robot worden gegeven. Zonder
dergelijke kommandos speelt de robot de noten ook wel, maar dan klinkt het onverbiddelijk
als een karrikatuur en erg mechanisch. Het is een grote gebruikersfout om de
wind aan te zetten en geen noten te spelen. Dit leidt niet alleen tot lekkende
noten, maar veroorzaakt bovendien ook heel wat volstrekt overbodig achtergrondlawaai.
Enkele snapshots genomen tijdens de bouw van deze automaat:



Bouwdagboek:
Omdat ons vaak wordt gevraagd hoeveel werk en tijd kruipt in,
en nodig is voor, het bouwen van een muzikale robot, hebben we ook voor <Ake>
een beknopt bouwdagboek bijgehouden:
- 15.05.2003: aankoop Hohner Musette II accordeon rommelmarkt. Reparatie instrument.
- 16.05.2003: eerste ideen en konkrete tekeningen.
- 20.05.2003: verwijdering akkoordmechanisme in de bassen.
- 02.06.2004: ontwerp blaas/zuig mechanisme met 4-weg mengkraan.
- 11.07.2004: ontwerp automatisering basrieten.
- 13.07.2004: TIG laswerk solenoid houder bassen.
- 14.07.2004: TIG laswerk chassis linkerkant.
- 15.07.2004: Plasma snijwerk inox plaat. Bevestiging linker en rechterhelft
akkordeon. Bestelling Lucas-Ledex Dormeyer solenoids voor de diskant. Type:
195203-2-34 . Dit zijn duwmagneten die rechtstreeks de knoppen zouden moeten
kunnen indrukken. We hebben 46 stuks nodig. Begin zoektocht naar een geschikte
4" vierwegmengkraan (90mm aansluitingen!).
- 28.07.2004: Ontwerp model trakturen in inox staaf. Eerste prototype gemaakt.
- 29.07.2004: Trakturen akkoordbassen geplooid, elektromagneten gesoldeerd
en gemonteerd. Ontwerp elektronische schakelingen op basis van twee PIC controllers.
- 30.07.2004: Trakturen vrije bassen: ontwerp en eerste prototypes. Uitzagen
doorgang in akkordeon kast. Montage inox L-profiel met trekmagneten.
- 01.08.2004: Vervolg montage en plooiwerk trakturen baskant. Laswerk M5 inox
draadstangen voor bevestiging beide akkordeonhelften op de windlade. Ontwerp
draagkonstruktie elektromagneten melodiekant.
- 02.08.2004: Plasma snijwerk, plooiwerk en TIG-laswerk windlade uit 3mm inox
plaat.
- 03.08.2004: Ontwerp 4-weg mengkraan in inox: er blijken geen dergelijke
kranen in de handel verkrijgbaar te zijn. Kraanhuis laten draaien bij MEA.
Windlade volledig dichtgelast en gepolierd. Gat gesneden voor 88.9mm flens,
aansluiting 4-wegmengkraan. Voor de automatisering van die kraan blijken Lukas
Ledex draai-solenoids type BTA, size 6EV (bvb. bestelnummer 190836-025) ideaal
geschikt. Helaas staan die spullen 315$ per stuk geprijsd in hun katalogus...
- 04.08.2004: Steunplaat spoelen melodiekant gezaagd en geperforeerd in register
met de knoppen.
- 05.08.2004: berekening dimensionering automatiseringsonderdelen windvoorziening.
- 11.08.2004: Metingen snelheid en koppel bij gebruik van stappenmotor voor
ventielsturing.
- 18.08.2004: levering inox Demar-Lux.
- 26.08.2004: 4-weg mengkraan afgewerkt. Volledig in inox.
- 27.08.2004: aanlassen drie haakse bochten 104mm aan mengkraan. Paswerk laukhuff
motor en flensaansluiting.
- 28.08.2004: lassen basismontageplaat in Inox. Zagen steunstukken met kobalt
zaag.
- 29.08.2004: steunbeertjes onder 120 graden opgelast op buisvoet en grondplaat.
Windlade vastgelast op basiskonstruktie. Eerste voorlopige montage akkordeonhelften
op chassis. Plaatsing Laukhuff kompressor. Test winddruk en klepmekanisme.
- 30.08.2004: ontwerp en bouw elektromagnetische besturing voor de vierwegmengkraan:
met snaarwiel, draaihoek 45 graden. De elektromagneet moet met PWM worden
aangestuurd. De nulstand kan gevizualiseerd worden met een domme kracht op
de as.
- 31.08.2004: frame voor PC boards melodiekant gelast. Meting kracht nodig
voor registerschakeling: 10 Newton, bidirektioneel. We moeten dus minstens
de Laukhuff traktuurmagneet 300810 toepassen (twee stuks).
- 01.09.2004: konstruktie as. Wielen met massief rubberbanden ingekocht, asmaat
25 mm. Soldeerwerk PC board mosfets en latches voor de baskant. Ontwerp PIC
board voor de noten. Solderen en assembleren van de noten PIC.
- 02.09.2004: schakeling voor PIC 2 geassembleerd. Past op eenzelfde eurokaart
print als de eerste PIC. Alle microcontroller taken gebeuren nu op een enkele
print. Laswerk steunplaatjes voor twee Siemens Sitop voedingsmodules uitgevoerd.
- 03.09.2004: As wielen gedraaid op draaibank. Laswerk onderstel. Draaibeugel
gelast voor ondersteuning elektronika chassis.
- 04.09.2004: Bouw midi interface. Konstruktie 230V en midi aanslutingen.
Montage 5/12V SMPS module.
- 05.09.2004: Plaatsing CCD kleurkamera met BNC uitgang. Oplassen 5/12V SMPS-chassis.
Montage netspanningdistributie en midi board. Bedrading hoofdmodule, 24V voeding,
besturing baskant en ventielen. Eerste elektrische tests.
- 06.09.2004: Aardlekprobleem met de Siemens Sitop voedingen. Kunnen niet
werken zonder aardverbinding? Volledige PIC specifikatie bezorgd aan Johannes
Taelman.
- 07.09.2004: TIG laswerk handvat. Bevestiging met M20 inox bout. Wielstel
vastgelast op basisplaat. Laswerk onderkant afgewerkt. Steunpoot aangelast,
met rubberdop. Afkitten met zuurvrij siliconerubber (Loctite) van de baskant
van binnenuit in de windlade.
- 08.09.2004: Afwerking bedrading baskant. Start montage onderchassis voor
melodiekant. Laswerk en begin bestukking latch en mosfet boards. Afregeling
4-weg mengkraan. Afregeling registratiemagneten.
- 09.09.2004: her-assemblage melodiekant.
- 10.09.2004: bevestiging blauwe platen tegen achterzijde Sitop voedingen.
Afwerking met slotmoeren M4. Flatcables gemaakt voor de databus.
- 11.09.2004: Pic 1 geprogrammeerd en gebrand. Kode toegevoegd aan g_gorgel.exe
voor tests.
- 12.09.2004: GMT testkode. Debug hardware PIC board. Soldeerwerk latch boards
baskant.
- 13.09.2004: Pic1 getest: blijkt bugs te hebben... alle noten blijven plakken.
Premiere Moniek's performance met de onaffe Ake.
- 14.09.2004: Bedrading voeding melodiekant. Initieel af te regelen op 12V.
Blauwe LED gemonteerd op melodiekant boards.
- 15.09.2004: Bedrading data en adres lines melodiekant. Uitlijnen inox chassis
elektromagneten melodiekant. We wachten nog steeds de levering af van de Lucas
Ledex elektromagneten...
- 16.09.2004: Konstruktie veerlijst baskant. De bestaande veertjes blijken
niet sterk genoeg om de blaasdruk op de kleppen te weerstaan en hen dicht
te houden. De werkdruk (70mm H2O) is wellicht ook wat groter dan wat normaal
in een akkordeon aan druk wordt opgebouwd.
- 17.09.2004: Eindelijk levering Lucas Ledex duwmagneten voor de melodiekant.
Meteen gemonteerd en klavierkant afgelast.
- 18.09.2004: Integrale dag gesoldeerd aan de elektromagneten en bedrading
melodiekant.
- 19.09.2004: Montage gesoldeerde en volledig bedrade melodiekant (Vorsetzer)
op de toetsen. PIC1 opnieuw gebrand. LED flitst nu wel bij het opstarten.
- 20.09.2004: aanmaak en aanleg kabelbomen. Datalines flatcable vervangen
wegens kortsluiting op een van de knijpkonnektoren.
- 21.09.2004: afregeling onderste trakturen baskant.
- 22.09.2004: plexiglas beschermvenster gemaakt over elektromagneten melodiekant.
- 23.09.2004: zoektocht naar transparante zelfklevende zacht PVC dopjes, diameter
ca. 6mm.
- 24.09.2004: Debug mikrokode PIC1 met Johannes Taelman.
- 25.09.2004: afregeling trakturen baskant: noten 19-42. Korrektie hardware
bug PIC2: pin 20 lag niet aan +5V! Experimenten met dempingsmateriaal voor
de terugslag van de melodie-elektromagneten.
- 28.09.2004: GMT interface voor tests afgewerkt.
- 29.09.2004: Nieuwe soft voor PIC2 ingeladen. De 4-wegmengkraan werkt nu,
maar heeft nog teveel last van hysteresis.
- 30.09.2004:Verdere afregeling trakturen baskant. Demping met silicone-gel.
Afdichting met rubber tochtband aan melodiekant.
- 01.10.2004: Pic tests en test afdichtingen.
- 02.10.2004: Trekveren gemonteerd op baskant elektromagneten. Transparante
terugslagdempers gekleefd op polyacrylaat beschermpaneel melodiekant. Ake
speelt zijn eerste tango! PIC2 blijft onbetrouwbaar reageren op de controller
7 kommandos. Nu eens doet ie het, dan weer niet... Uit te zoeken.
- 03.10.2004: Terugslagdempers op beschermpaneel afgewerkt. Luchtafdichting
boor en konstruktiegaatjes in windlade.
- 05.10.2004: Verdere detail debug van de PIC2 mikrokode.
- 08.10.2004: afwerking stuurstang.
- 18.10.2004: tests met PIC kode V1.1. Nog steeds bugs.
- 19.10.2004: eerste try out van "Aux Arbres", voor Hurdy en Ake.
Premiere 'Ake Birthday' van Barbara Buchowiec.
- 22.10.2004: mechanisme windklepsturing verbeterd: tegengewicht aangebracht
voor terugkeer naar de nul-stand en kabel vervangen door fietsremkabeltje
in gevlochten staaldraad.
- 02.11.2004: PIC 1 vervangen door versie 1.1. Lijkt te werken: geen plaknoten.
Puls-sturing voor de melodienoten blijft echter wenselijk. Bij blaaswind is
minder kracht nodig dan bij zuigwind. Pic 2 problemen blijven op te lossen...
- 18.11.2004: Ake PIC debug sessie met Johannes Taelman.
- 19.11.2004: Bugs hard/soft in Ake solved. Enkele bedradingsfouten in de
midi-in kringen gekorrigeerd. Er waren serieuze glitches in de 5V voor PIC2
vanzodra de windklep PWM aktief werd. Een serieweerstand van 10 Ohm in de
PIC voeding bleek een adekwate remedie.
- 20.11.2004: Evaluatie en test nieuwe PIC firmware. Motor controller gaat
niet volledig uit bij value = 0. Regelklep heeft nood aan een feedbacksturing,
wellicht met een ADXL202 sensor. De elektromagneten aan de melodiekant hebben
toch wat meer kracht nodig. Daardoor is de diskant te stil tegenover de bas.
De baskant reageert, om mechanische redenen, wat te traag.
- 21.11.2004: test en evaluatie sessie. Domme massa aan windventiel uitgevoerd
met een messing bol.
- 26.11.2004: verdere ontwikkeling kode voor PIC2: pwm sturing kleppen. Overleg
met Johannes Taelman.
- 30.11.2004: Montage ADXL202 positiesensor op as windklep.
- 01.12.2004: Werkdag Johannes Taelman sensorkode voor windklep.
- 02.12.2004: software ontwikkeling positiefeedback mechanisme.
- 04.12.2004: opname kracht/positiekurves windklep met sensor.
- 14.12.2004: Johannes Taelman: ontwikkelingswerk PID controller voor windklep.
- 19.12.2004: Fuzzy Harmony Study #12 adapted for playing on Ake
- 28.12.2004: snaaraandrijving windklep vervangen door een tandriem en tandwiel
(CTB24XLO37) op de as. Dit loopt soepeler en heeft minder hysteresis dan de
eerdere koppeling met een staalkabeltje doorheen de as. PID regeling waarbij
telkens slechts 1 van beide spoelhelften via PWM aangestuurd wordt, belooft
wel beter te werken.
- 30.12.2004: afwerking tandsnaarkonstruktie.
- 05.01.2005: meetsessie windklep met positiesensor en nieuwe mechanika.
- 11.03.2005: PID regeling nog steeds wachtende op implementatie door Johannes
Taelman...
- 14.03.2005: Meetsessie Johannes voor windklep.
- 27.06.2005: Wijzigingen in opbouw sopraankant: de hoek tussen magneten en
toetsen wordt rechtstandiger gemaakt ter beperking van de wrijvingsverliezen.
Voorbereiding voor PWM implementatie van de toetsbesturingsmagneten teneinde
een groter trajekt en kracht bij de aanslag van de noten te krijgen. Mits
PWM wordt toegepast kan de positieve aanslagspanning verhoogd worden tot 24V.
Als houdspanning is 12V (50% PWM) ruim voldoende.
- 30.06.2005: Sopraanklavier verder herbouwd en voorzien van polyamide aandrukcilinders,
buitendiameter 14mm, gedraaid op de draaibank. Eerste toetsenrij: 13mm hoog,
gatmaat 1.6mm, gatdiepte 7mm. Tweede rij: 10mm hoog, gatmaat 1.6mm, gatdiepte
7mm. Derde rij: geen cilinders. Voor een goed indrukken is een voedingsspanning
van 30V nodig... Pulsduur 40ms maximaal. De duty cycle voor note-hold moet
dan geprogrammeerd worden op 40%.
- 01.07.2005: Nieuwe specifikatie van de firmware. Overleg met Johannes Taelman
daarover.
- 20.07.2005: Nieuwe firmware klaar voor de melodie latch PIC. Te testen.
- 27.07.2005: Bij tests nieuwe firmware sneuvelde een mosfet en solenoid (laagste
noot melodiekant...)
- 29.07.2005: reparatie hardware... mosfet IRL640, latch 74HCT574 and solenoid
replaced for note 49.
- 05.08.2005: Nieuwe poging tot herprogrammatie firmware voor de PWM sturing
van de note latches... Nog niet echt bevredigend.
- 08.08.2005: Nieuwste versie van de firmware voor de noten PIC lijkt nu naar
behoren te werken. De 100% duty cycle puls duurt nu 10ms. Daarna valt (voor
de hold) de PWM terug op 25%.
- 10.08.2005: Ake tests in muzikale toepassingen door Kristof Lauwers en Sebastian
Bradt.
- 14.08.2005: problemen met de windsturing van ake: controller 1 wordt niet
steeds goed ontvangen of verwerkt door de PIC.
- 19-20.08.2005: Ake premiere in Zwitserland: Festival van Ruemlingen
- 03.09.2006: Teflon pads gemaakt 12mm doorsnede met een centraal gaatje van
1.3mm voor de derde rij knoppen vvan de melodiekant. Het mechanisme blijft
evenwel veel bijgeluiden produceren.
- 09.10.2006: ontwerp montage van melexis sensoren op de as van de regelklep.
- 15.12.2006: New type Siemens Sinamics controller G110, 0.12kW has arrived.
- 11.07.2007: Nazicht Ake voor transport op de Gentse Feesten.
- 17.01.2008: Opname solo demo stukje van Moniek Darge voor de CD lonely robots.(LPD)
- 01.08.2008: Bespreking met Johannes Taelman van een eventueel nieuw ontwerp
voor de besturing van de 4-weg mengkraan middels een stappenmotor.
- 14.08.2008: Konstruktie chassisplaat voor de montage van een Siemens Sinamics
motorcontroller. Hierop voorzien we meteen plaats voor twee fel blauwe frontale
LED's.
- 15.08.2008: Vanaf nu is Ake aan versie 2.0 toe. De oorspronkelijke file
waarin de versie 1.0 beschreven wordt plaatsten we
in het ake archief. De Siemens motorcontroller werd geprogrammeerd en
de parameters aan het eind van deze webpagina toegevoegd. De motor, oorspronkelijk
bedraad voor enkelfazige werking op 230V met een ac kondensator, hebben we
anders bedraad zodat hij nu in een driefazige delta-schakeling op 132V kan
werken. Controller 66 moet nu worden geintroduceerd om de motor aan en uit
te schakelen.
- 16.08.2008: Ontwerp bestukking van een midihub board om de oude midi-in
te vervangen -die bleek toch niet helemaal betrouwbaar- en om de nieuw geintroduceerde
PIC mikrokontroller voor de nieuwe motorbesturing te huisvesten. De midi I/O
konnektors komen nu op de bodemplaat te zitten, aan de kant van de windklepbesturing.
- 17.08.2008: Laukhuff bidirectionele elektromagneet gedemonteerd evenals
de positie-sensor. Proef plaatsing stappenmotor. Uitzoeken snaartandwieltjes.
Bestukking midihub board. Konnektor X17 nu integraal voorbehouden voor de
Siemens motorbesturingsmodule. Konnektors X12 en X15 samen besturen de stappenmotor.
Voor diode D6, in de analoge uitgang, gebruiken we nu een 1N5819 Schottky
type. Dit werkt beter dan de BAT45 in vroegere ontwerpen. Onderzoek naar geschikte
positiesensor: optical encoders, proximity, melexis... Studie van het bevestigingsprobleem
voor de lateraal gemagnetiseerde ferrietmagneet op de 20mm as van de windklep.
- 18.08.2008: Konstruktie van een afregelbare drager voor de stappenmotor.
Voor de tandwielen gebruiken we op de motoras een 12-tands wiel (diameter
19mm) , terwijl op de windklepas een 24 tands wiel (diameter 38mm) wordt geplaatst.
De transmissieverhouding is dus 1:2, waardoor de stappenmotor bij een 50 stappen
kommando, de windklep een hoek van 45 graden laat maken. De dynamische resolutie
is dus ongeveer 6 bit. Wanneer we de motor in half-stap bedrijf laten werken,
dan halen we gemakkelijk 7 bit. Laswerk verplaatsbaar chassis voor de stappenmotor.
Voorziening voor plaatsing van een Pepperl+Fuchs proximity sensor met 2 inbus
M6 stalen boutjes als indicators voor de 0 graden en de 180 graden posities.
 Bij elke volledige doorgang door het begin van een periode kan met dit signaal
de software in PIC3 gekallibreerd worden. Bij het opstarten is autokalibratie
naar de nul-stand te implementeren.
Bij elke volledige doorgang door het begin van een periode kan met dit signaal
de software in PIC3 gekallibreerd worden. Bij het opstarten is autokalibratie
naar de nul-stand te implementeren.
- 19.08.2008: Bedrading Melexis proef sensor naar het midihub board (4 polige
Weidmuller) met afgeschermde kabel. De afregeling van de sensorpositie kan
pas gebeuren in koordinatie met de betreffende PIC software. Solderen SMD
100nF caps (3) tussen de pootjes van de melexis SOIC MLX90316 op het opzetprintje.
NC pinnen aan massa gelegd. Dit werkje moest evenals het solderen van de SOIC
behuizing, onder de mikroskoop gebeuren... Printjes voorzien van een 3-polige
SIL header. Voorzieningen solderen en berekenen voor signaal-konditionering
op het midi-hub board voor de ontvangst door de PIC van de signalen afkomstig
van de melexis sensor in kombinatie met de Pepperl+Fuchs sensor. Elektrische
test van het midihub board. Finalisatie bedrading. Bespreking van de firmware
met Johannes Taelman.
- 20.08.2008: Plaatsing en afregeling van twee M6 x 25 stelmoeren met hex-inbus
en kratereind voor de positiesensor.
- 21.08.2008: Konstruktie nieuwe terugslagplaat voor de melodiekant. Deze
keer uit 8 mm dik polykarbonaat en voorzien van dikke viltkussentjes. Dit
moet een verbetering opleveren van het terugslaggeluid bij note-off's.
- 22.08.2008: Herstelling niet spelende noot 49: draadje was los aan de soldeerlippen.
- 23.08.2008: Programmeersessie van de derde PIC mikrokontroller met Johannes
Taelman valt in het water.... Aanpassing en updating van het <Ake> testprogramma
in GMT. Verbetering van de werking van de registerschuif. Ontwerp individuele
trajektbegrenzingen op de solenoiden van de melodiekant. Hiervoor moeten we
46 eng gedraaide M3 schroefdraden in het polykarbonaat kunnen tappen. De instelling
kan dan aan de bovenzijde gebeuren met M3 x 20 inox inbus stelboutjes. De
onderzijde van de boutjes wordt voorzien van een stopmoer waarop een dik viltje
gekleefd is. Kracht nodig voor de register-schuif opnieuw nagemeten: 20 Newton.
De gemonteerde Laukhuff magneten (type 3 008 10) leveren bij een bedrijfsspanning
van 24 V (410 mA) een kracht van slechts 10 Newton. We zullen dus de voedingsspanning
heel wat moeten verhogen om dit mechanisme goed te doen funktioneren.
- 24.08.2008: Ontwerp bouw en montage van een extra voeding voor de registerspoelen.
Transfo: 33 V sec.,/ 2 A, na gelijkrichting krijgen we 48 V ongestabiliseerd,
wat o.k. is in deze toepassing. Ook nu blijkt de uitgeoefende kracht slechts
marginaal voldoende!
- 25.08.2008: Montage lampjes op Ake. Het wachten is nu op nieuwe PIC firmware
om Ake opnieuw in het orkest te kunnen laten funktioneren.
- 28.08.2008: Montage witte LED spot onder de overdrukaanvoerbuis. Montage
gele LED strip in SMD op de printdrager aan de baskant. Halogeenlampjes kunnen
nu via midi geschakeld worden.
- 30.08.2008: Programmeersessie met Johannes. Motor-sturing werkt. (ctrl 66
en ctrl 1). De steppenmotor werkt maar doet nu 64 ipv 50 stapjes voor een
half kwadant (45 graden) . Het inlezen van de sensor werkt maar is nog niet
foutloos. Een kallibratie voor het nul-doorgangstrajekt zal in de firmware
nog geimplementeerd moeten worden.
- 31.08.2008: Test en evaluatie sessie onder GMT besturing. Afregeling trajekt
solenoids op de melodiekant. We zouden een speelmodus kunnen implementeren
waarbij de windklep op de velocities gemapt wordt. Dit kan voor users wellicht
komfortabeler zijn dan de sturing via ctrl.7. Dit is te bespreken met de gebruikers.
- 06.09.2008...: Waiting for Johannes Taelman to update firmware...
- 10.02.2009: Still waiting for Johannes.
- 19.06.2009: Stepping motor code for the valve improved. Now its working
fine. Controller 7 implementation changed somewhat.
- 11.01.2010: anomalies discovered in the implementation of the motor valve
(ctrl 7.). To be checked again with Johannes Taelman.
- 23.02.2015: Naar aanleiding van de ombouw van de motorbesturing op onze
<Harma> robot, overwegen we nu ook een intelligente motorbesturing te
voorzien voor <Ake>.
- 28.02.2015: New PCB drawn for Ake's motor control:
 The firmware should use intelligence in that it adapts motor speed to the
notes actually playing. We did similar coding for <Harma> and <HarmO>.
The firmware should use intelligence in that it adapts motor speed to the
notes actually playing. We did similar coding for <Harma> and <HarmO>.
- 31.08.2023: Trouble encountered in attempts to start <Ake> up again.
It had not been used in the orchestra for about a year. Maybe we should rewrite
(and update...) the entire firmware for all PIC's involved.
- 01.09.2023: The board documented here on 28.02.2015 in fact never found
a place in <Ake>. We must have used it for <Harma> and <HarmO>.
Rechecking test code in GMT. It seems we cannot find back the source code
for the motor control PIC... Documentation brought in-line again with the
observed reality. GMT-testcode updated.
- 17.09.2023: <Ake> doet mee aan de opstelling met het interaktief robotorkest
in de Hnita hoeve in Heist-op-den-Berg. Begeleider en animator daar is dr.Hans
Roels. Ook <3Pi>, <Toypi> en <Steely> zijn van de partij.
Enkele jaren na de afwerking van het eerste werkende prototype (V1.0) , kreeg
<Ake> een broertje, <Bako>, in de vorm van
een heus basakkordeon, deze keer met mechanisch bewegende balg....
Last update: 2023-09-17
by Godfried-Willem Raes
Technical data sheet and maintenance instructions:
Technische gegevens en instrukties voor onderhoud en demontage:
- Motor/compressor specs: Laukhuff Ventola , 70mm H2O.
Serienummer: 30 642 Va. Type 2.5/70. Debiet 2.5 m3 per minuut. Bestelnummer
Laukhuff katalogus: 6 125 70. Prijs (2004): 893 Euro. Rewired for 3-phase
delta connected operation on 132V (15.08.2008) and use in combination with
a Siemens Sinamics G110 motor controller.
- Solenoids baskant: 24V, Laukhuff voor de bassen, via inox trakturen. Specs:
4.9 Newton bij 5mm trajekt, 9.8 Newton bij 2.5mm. Gelijkstroomweerstand: 140
Ohm, stroom 170mA. Laukhuff bestelnummer 300110.
- Solenoids melodiekant: Lucas Ledex STA 13x27 Tubular Push types 195223-2-34
voor de diskant. Gelijkstroomweerstand:37.4 Ohm. Uitvoering met 60 graden
anker, vrij roterend. Diameter:13 mm, bouwhoogte: 27 mm. Gatmaat voor de bevestiging:
10 mm. Schroefdraad: M10 x 0.75. Toelaatbare bedrijfsspanning bij 100% duty
cyle: 12.2V - kracht: 0.27-0.58 N, bij 50% duty cycle: 17.3V - kracht: 0.62-1,11N,
bij 25% duty cycle: 24V, kracht: 1.38 - 2.14N, en bij 10% duty cycle 39V,
kracht 3.07 - 4.18N. ( 32$ per stuk, ca. 12€ per stuk in grotere aantallen).
Te bestellen bij Saia-Burgess Benelux (Mechelse Steenweg 277, 1800 Vilvoorde)
- Registratie: twee Laukhuff traktuurmagneten type 300810 (24V/410mA). Kracht
10 Newton. Nominaal trajekt: 10 mm. Gelijkstroomweerstand 59 Ohm. Bestelnummer
Laukhuff: 300810.
- Besturing 4-weg mengkraan (mixing valve): stepping motor with position sensors.
The motor can fully rotate in both directions. Stepping motor: Vexta model
PXB44H-03A-C38. 12V DC, 0.4A, Oriental Motor Control Ltd. Japan. 2-phase,
1.8 degrees per step. (200 steps per omwenteling).
- Proximity sensor for index position: Pepperl+Fuchs NJ2-V3-N (Farnell order
code: 372-6769, cost 32.86Euro). Sensitivity range: <= 2mm. Normally Closed,
nominal 8 Vdc supply. (Acceptable voltage range: 5 V-25 V). Maximum allowable
current 15 mA. The principle of operation of these inductive proximity sensors
is that they contain an LC oscillator circuit (operating frequency ca. 714
kHz) that as soon as a metalic object comes close enough, the oscillation
damps and eventually stops alltogether. The amplitude output can be used as
an analogue signal to measure the distance in a traject-range of about 1mm
corresponding to a voltage range depending on the circuit. The remainders
of the oscillation signal in the high state, can be greatly reduced by placing
a 47 nF capacitor across the inputs to the PIC, but this goes at the detriment
of response speed. So here we did not fit a capacitor. The measured hysteresis
of the sensor device is ca. 3% of the range (1mm), so ca.30 microns. Although
the sensors are specified for a normal operating voltage of 8 V DC, they work
fine down to ca. 3 V and up to 25 V.
- Tandwielen: 12 tanden (diameter 19 mm) op de motor (as 5 mm) en 24 tanden
(diameter 38 mm) op de windklep (as 20 mm). Tandriem: Type CTB 86XL037 (43
tanden), riembreedte 9.5 mm
- Position sensors: Analog sensor: Melexis, type MLX90316. Digital sensor:
optical, indicates the 0 position.
- Video kamera: B-Cam21C (PAL) color. Voeding: 9-12 V DC, 36 mA. Standaard
video out 1 Vpp - 75 Ohm. Resolution: 628 Hor, 582 Ver. Sensitivity: 3 lux.
Openingshoek: 52x43 grad. Fokus: f = 6.0, diafragma F = 1.6. Beeldsensor:
OV7910. S/R >= 48dB. Dynamic range > 72dB.
- 5 V/12 V SMPS: 5 V-4 A and 12 V-1.5 A Pmax <= 35 W
- Lampjes: Halogeen 12 V - 20 W, Osram Halostar Starlite, fitting G4. . Beide
lampen staan in serie geschakeld en branden op halve spanning. Wanneer deze
stukgaan moeten ze onverwijld worden vervangen: ze garanderen immers de minimale
belasting gespecifieerd door de fabrikant van de Sunpower voedingseenheid!
- Transparante terugslagdempertjes gekleefd op het plexiglas (polyacrylaat)
paneel dat de melodie solenoiden afschermt: Bricobi, Dambordstraat 26, 1000
BRUSSEL. 'Patins adhesifs anti-chocs', 28 stuks per verpakking, diameter 8mm.
Bestelkode: COD 175-7863. [ Ake version 1.0] This is changed in version 2.0.
- Version 2.0: Transformer for register solenoid power supply: Matsushita,
model.52165630 (ETP80P47E) Primary: 220/240V, secondary: 31V - 2.2A (68.2VA).
- Yellow LED strips: LM-FB26Y-12, Farnell order code: 122-8819
- Demontage en onderhoud:
- 1. de baskant is op de windlade van binnenuit vastgelijmd met siliconerubber.
Om de rieten van de baskant te bereiken moet de melodiekant van de windlade
worden losgenomen. Deze is met rubber tochtband afgedicht en kan losgenomen
worden.
- 2. De mengkraan kan langs beide kanten worden geopend voor reiniging
en onderhoud. Markeer goed de posities en de bevestiging want de kraan
sluit maar op een enkele wijze goed af. De smering van de bewegende delen
mag uitsluitend gebeuren met Rhodorsil Pate 408 van Rhone Poulenc. Geen
smeerolie of vet gebruiken.
- 3. De besturingseenheid aan de baskant is met 1 enkele M12 inox inbus
bout vastgemaakt op de hoofdkonstruktie. Om ze los te nemen moeten alle
elektrische konnektoren eerst worden gelost.
- 4. Het stuur/handvat is met 1 enkele M20 inox bout en een veer verbonden
met de basisplaat. Het stuur moet worden losgemaakt om de kompressor te
kunnen verwijderen/vervangen.
- 5. Wanneer de robot om een of andere reden ondersteboven moet worden
geplaatst, moet hij worden ondersteund op de windlade zelf. Het uitstekend
30x30 inox profliel met de baskant elektromagneten mag niet worden gebruikt
om het gewicht van de machine te dragen daar het uitsluitend op de lichte
houten struktuur van het akkordeon is bevestigd.

Programming information and settings for the Siemens Sinamics G110 motor
controller:
| Parameter nr. |
setting |
comment |
| P0003 - Parameter Access Level |
3 |
access to all parameters |
| P0010 - Quick commisioning params |
0 |
must be set to 1 to change motor params.
For normal operation, must be set to 0
|
| P0100 - country setting |
0 |
= default value (kW / 50Hz) |
| P0304 - nominal motor voltage |
132V |
motor specs. (230V / SQR(3)) |
| P0305 - rated motor current |
0.958A |
calculated for delta operation |
| P0307 - motor power |
0.13 kW |
motor specs |
| P0310 - nominal motor frequency |
50Hz |
motor specs. |
| P0311 - nominal motor rpm |
2800 |
motor specs. |
| P0700 - ctrl. via control panel or digital I/O |
2 |
use digital inputs for ctrl. (on/off, rotation, speed) |
| P1000 - select frequency setpoint |
2 |
set analog setpoint (1- OP f-ctrl) |
| P1080 - min.. motor frequency |
10 Hz |
|
| P1082 - max. motor frequency |
75 Hz |
|
| P1120 - ramp up-time |
2" |
|
| P1121 - ramp down time |
6" |
|
| P2000 - frequency range |
80 Hz |
|
| P3900 - end quick commisioning |
1 |
|
With these settings, the range for controller 1 will be 10 Hz to 63Hz, the
maximum analog voltage from the PIC3 board being ca. 7.5V
Evaluation and self criticism of the <Ake> design:
- The operation of the melody keyboard is too noisy. The anchor return noise
is damped, but we stay with the sound the valves make on closing inside the
accordion. At note-on commands, we apply a large overvoltage to the solenoids
and thus cause very high acceleration of the anchors. This is very noisy and
does not meet our criteria. Human fingers by the nature of their operation,
do not have such high acceleration and have an intrinsic damping on release.
Hence, they can play the keys of the accordion almost without clicking noises...
