| |
First presented at Pecha Kucha 20 mei 2008, at Imal Brussels.
Logos Foundation
A twenty slide presentation in the 20x20 format with twenty-second
comments by Godfried-Willem Raes
The slides can be enlarged by clicking on them (they open in a new window).
|
| 1. |

|
Logos took off in 1968 in Ghent...
A quite unique center for new music and experiment runned by artists. In
2018 Logos will feast its 50th anniversary. 2008 was the occasion for the
inauguration of its newly renovated stainless steel building, located at
Bomastraat 26-28 in Ghent. |
| 2. |
 |
Inside the building we find the
famous Logos Tetrahedron: a space with ideal acoustics specialy build for
new music performances. On the picture we see the rooftop as seen from the
inside. The space seats maximum 150 people. Weekly concerts devoted to new
musics take place inside. |
| 3. |
 |
This performance space with its
characteristic 60 degrees angles, was used extensively to develop my full-evening
music theatre compositions 'A Book of Moves' and 'Songbook' , both completely
performed on my sonar based invisible instrument. This pioneering work in
fully wireless gesture control has placed Logos on the map of the most advanced
centers for music technology in the world. |
| 4. |
 |
One of the early versions of this
instrument -using analog computing electronics- was used for my 'Holosound'
production -here seen in a performance in the townhall of Arnhem- wherewith
the Logos Duo (myself and Moniek Darge) have toured all over the world.
The explosives required in the performace were always carried on board of
airplanes... |
| 5. |
 |
In the last 25 years, at the Logos
Foundation, we have constructed and developed mostly what became the world's
largest robot orchestra. The laptop server is setup in the very corner of
the tetrahedron hall. Many composers come to Logos to develop new pieces
for this orchestra. |
| 6. |
 |
The orchestra nowadays in composed
of 70 robots and has grown so large that it is impossible to fit it onto
a single picture. Here we see part of the left side of the stage, with a
first group of some 10 robots: organs, bell-machines, a double string hurdy-gurdy,
the player piano, a vibraphone, an accordeon and a sousaphone. |
| 7. |
 |
The right side is also fully populated
with these sofisticated automates that have a complete set of expressive
possibilities surpassing human possibilities. Here we see an anklung, a
reed organ, stainless steel bells, percussion and a few more organ modules... |
| 8. |
 |
The player piano, a Vorsetzer, is
one of the key robots in the orchestra. It has full 88 note polyphony, 16
bit velocity control and a very sensitive pedalling mechanism. It can play
all music composed by Conlon Nancarrow..., but of course, much more than
that. Its possibilities surpass easily those of any existing commercial
design (Yamaha, Ampico, Boesendorf, Marantz...) |
| 9. |
 |
Percussion robots also have a prominent
place in the robot orchestra. Each drum has a set of different beaters,
such that both fast repetition and timbral changes and nuance become possible.
All robots are exhaustively documented on an individual web page. All design
elements are placed in the public domain. This way machines can always get
better, humans never improve. |
| 10. |
 |
The snare drum, one of my smallest robots, has no less than 16 beaters,
as well as rimshots and precize controll over the resonator strings attached
to the lower skin.
Even the lights -a visual feature added to most of the robots- can be
computer controlled.
|
| 11. |
 |
All robots are designed as naked as possible, such that not a single
element of their operating principles is obscured nor hidden in boxes
and/or behind decorative elements. <Springers> is one of the largest
robots: it is 6 meter high and consists of five separate modules.
<Springers> can also be set up as an interactive audio art installation
piece.
|
| 12. |
 |
The <Puff> robot is tuned
in quartertones and all pipes have an individual bellow made of pyrex glass
and driven by a heavy duty push type solenoid. It looks somewhat like an
organ, but it is incapable of producing sustained notes. It's like a percussive
wind instrument. |
| 13. |
 |
<Qt> is a large scale quartertone
organ produced in part as a research project for the University College
in Ghent where I teach composition and where I am employed as a full time
researcher. |
| 14. |
 |
The latest robot is <Korn>: an automated cornet that can physically
move both horizontally and vertically. It is the first robot with gestural
output of my design. For the first time gestural input can generate gestural
output...
As is the case for all robots, all sound production is pure acoustic
and no electronic amplification is used.
|
| 15. |
 |
All robots together make up the
robot orchestra. This orchestra can play in full interaction with human
musicians equiped with either traditional instruments or a very wide variety
of sensing devices developed in the Logos Labs. |
| 16. |
 |
We already mentioned that our sonar
based invisible instrument, first invented and developed some 40 years ago,
is used to capture body movement and gesture. But, also pyrodetection based
sensors are researched. This sensor is only sensitive to movement of human
bodies, cancelling out moving objects and visual context. It works on heat
radiation with 10 micrometer wavelength. |
| 17. |
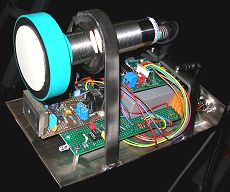 |
This sensor device uses both microwave
based radar devices (2.8 GHz) as pulsed sonar ranging technology (on 200kHz).
It has a resolution of better than 10mm over a range of 10 meters. It can
easily detect position, size of moving body surface, movement speed and
angle. |
| 18. |
 |
All gesture and body sensing devices
are used together in my -in the works- opera production 'TechnoFaustus',
wherefore the entire cast has to be naked, since all robots are controlled
by human expressive movement and since the devices work on the principle
of Doppler shift caused by reflection from the body. Performers need both
professional dance as well as musical skills. One a my favorite dancers,
Emilie De Vlam, is seen here performing 'Wandern'. |
| 19. |
 |
'Tekne' is one of the acts in Technofaustus, where Mefisto -the utmost
rational character in the drama- performs a triumphing dance, here performed
by myself using 4 radar sensing devices and the entire robot orchestra.
The robot orchestra presents every month a new concert production in
the Logos tetrahedron. Many young composers and performers are each time
involved. Details can be found on our extensive website.
|
| 20. |
 |
The robots can also be taken out for a walk into public spaces... This
is my <Vacca> robot playing in a public park during the Ghent Feasts.
In fact, we try to get the entire orchestra on the move more often, but
performing chances in Europe seem to be pretty scarce. Logos does not
have a lobbying force nor even a minimal PR department...
|